基于毫米波雷达的车用无线充电装置周围生物体检测系统的制作方法
1.本发明属于移动目标感知技术领域,具体涉及基于毫米波雷达的车用无线充电装置周围生物体检测系统。
背景技术:
2.近年来,世界范围内的汽车保有量不断攀升,能源短缺、环境污染和交通堵塞等问题进一步恶化。电动汽车凭借节能与环保的显著优势已成为未来汽车发展的主流方向。随着电动汽车市场的逐渐壮大,消费者对基础充电设施的需求也呈现指数级别的增长。由于有线充电方式对接口规格和充电线材有严格要求,时常造成不好的用户体验,电动汽车无线充电技术迎来了绝佳的发展机遇。
3.汽车无线充电方式为电磁感应式或无线电波式,因其传输功率较大,所以会对充电区域周围移动生物体造成一定的危害,无线充电装置周围生物体检测成为一种必要的安全保障措施。毫米波雷达凭借全天时、全天候检测能力受到了市场的青睐,然而将其用于无线充电装置周围移动生物体检测时,存在多传感器信息难以融合、车身抖动点云无法消除、预警策略过于简单等问题,毫米波雷达检测技术在无线充电场景下的应用需要改进和完善。
技术实现要素:
4.为解决现有技术中存在的技术问题,本发明的目的在于提供基于毫米波雷达的车用无线充电装置周围生物体检测系统。
5.为实现上述目的,达到上述技术效果,本发明采用的技术方案为:
6.一种数据处理方法,包括以下步骤:
7.获取多个毫米波雷达数据,对多个毫米波雷达数据进行时间对齐、空间对齐及信息融合处理,随后进行车身抖动消除、报警范围划定,制定变时距预警策略,根据报警范围内是否存在检测目标选择是否报警。
8.基于毫米波雷达的车用无线充电装置周围生物体检测系统,包括执行如上所述的一种数据处理方法的上位机。
9.如上所述的基于毫米波雷达的车用无线充电装置周围生物体检测系统,还包括:
10.无线充电装置外壳;
11.多个毫米波雷达,分布在无线充电装置外壳四周,并安装在无线充电装置外壳内部;
12.所有所述毫米波雷达分别与上位机输入端相连,通过毫米波雷达采集无线充电装置周围生物体信息并进行处理,得到动态点云、静态点云和目标物信息,静态点云信息表示毫米波雷达检测到的静态生物体,目标物信息表示毫米波雷达检测到的动态生物体,毫米波雷达将动态点云、静态点云和目标物信息再传输至上位机进行数据处理并执行报警策略。
13.进一步的,所述毫米波雷达通过数据线与上位机电性连接。
14.进一步的,所述无线充电装置外壳长84cm、宽73cm、高12cm;所述毫米波雷达共设有5个,分别记为雷达1、雷达2、雷达3、雷达4、雷达5,型号为ti iwr6843;所述上位机型号为s32k144。
15.进一步的,所述上位机进行数据处理并执行报警策略的步骤包括:
16.1)多个毫米波雷达数据时间对齐
17.2)多个毫米波雷达数据空间对齐
18.3)多个毫米波雷达信息融合处理
19.4)车身抖动消除
20.5)报警范围划定
21.6)变时距预警策略制定
22.7)报警执行。
23.进一步的,步骤1)中,多个毫米波雷达时间对齐的步骤包括:
24.上位机控制串口对多个毫米波雷达的数据依次读取,每个毫米波雷达的读取时间为一个极短的固定值,读取完所有雷达感知到的信息后,近似认为这段时间内所有雷达的信息为同一时刻信息,完成时间对齐。
25.进一步的,步骤2)中,多个毫米波雷达空间对齐的步骤包括:
26.以无线充电装置外壳中心为原点建立全局坐标系,然后通过旋转和平移变换,将每个毫米波雷达基于自身局部坐标系感知到的生物体信息转换为全局坐标系下信息,实现多个毫米波雷达的空间对齐。
27.进一步的,步骤3)中,多个毫米波雷达信息融合处理的步骤包括:
28.在完成步骤1)至步骤2)的多个毫米波雷达信息时空对齐后,通过马氏距离对毫米波雷达感知重叠区域中被重复检测到的生物体信息进行相似度分析,实现静态点云融合和目标物融合:
29.(1)静态生物体信息融合时使用的参数为静态点云在x、y、z方向上的坐标,马氏距离计算公式为:
[0030][0031]
式中,α和β为重复检查区域内两个毫米波雷达静态点云坐标构成的矩阵,∑为α和β之间的协方差矩阵:
[0032]
设定一个阈值,当计算得到的马氏距离小于该阈值时,认为两个毫米波雷达检测到的是同一个静态生物体,否则认为两个毫米波雷达检测到的不是同一个静态生物体;
[0033]
(2)动态生物体融合时使用的参数为目标物坐标x、y、z位置信息、目标物速度v以及速度的方向γ,马氏距离计算公式为:
[0034][0035]
式中,η和ξ为重复检查区域内两个毫米波雷达检测到的目标物x、y、z位置信息、目标物速度v以及速度方向γ构成的矩阵,∑为η和ξ之间的协方差矩阵为:
[0036][0037]
与静态生物体融合时相同,设定一个阈值,当计算得到的马氏距离小于阈值时,认为两个毫米波雷达检测到的是同一个动态生物体,否则认为两个毫米波雷达检测到的不是同一个动态生物体。
[0038]
进一步的,步骤4)中,车身抖动消除的步骤包括:
[0039]
以车底为基准向上设置物理围栏,摒除上下车及开关后备箱带来车身的振动,物理围栏的长和宽根据车辆的长和宽来确定,物理围栏底部的高度稍矮于车辆底盘高度;将静态生物体和动态生物体信息中z轴坐标值与围栏底部高度进行比较,若静态生物体和动态生物体z轴坐标高于围栏底部,则删去围栏内的所有静态生物体和动态生物体,保留物理围栏外的静态生物体和动态生物体。
[0040]
进一步的,步骤5)中,报警范围划定的步骤包括:
[0041]
以无线充电装置外壳为中心,分别向外延伸l1和l2的距离,l2大于l1,将延伸后l1包络和l2包络之间的区域设定为报警区域,l1与l2的长度可根据需求灵活调整。
[0042]
进一步的,步骤6)中,变时距预警策略制定的步骤包括:
[0043]
通过毫米波雷达读取到的动态生物体实时速度信息为基准构造投影线来预测动态生物体位置,投影线的长度与动态生物体移动速度呈指数级关系,投影线长度计算公式为:
[0044]
l
obj
=t
·v[0045]
t=k
·v[0046]
l
obj
=k
·
v2[0047]
式中,l
obj
为投影线的长度,t为投影时间,v为动态生物体的速度,k为调整系数。
[0048]
进一步的,步骤7)中,报警执行的步骤包括:
[0049]
报警区域内有动态点云、静态生物体和动态生物体三类感知信息,其中,动态点云不触发报警机制,当静态生物体和动态生物体投影线端点出现在报警范围并持续时间达到一定时间内时,发出报警。
[0050]
基于毫米波雷达的车用无线充电装置周围生物体检测方法,采用如上所述的基于毫米波雷达的车用无线充电装置周围生物体检测系统进行检测,包括以下步骤:
[0051]
通过多个毫米波雷达采集无线充电装置周围生物体信息并分别进行处理,得到动态点云、静态点云和目标物信息,静态点云信息表示毫米波雷达检测到的静态生物体,目标物信息表示毫米波雷达检测到的动态生物体,多个毫米波雷达分别将所得动态点云、静态点云和目标物信息传输至上位机,上位机根据如上所述的数据处理方法对毫米波雷达传送的数据信息进行数据处理并执行报警策略。
[0052]
在此基础上,本发明公开了一种计算机可读存储介质,存储有计算机可执行指令,该计算机可执行指令用于执行如上所述的一种数据处理方法。
[0053]
本发明还公开了一种设备,包括存储器和上位机/处理器,存储器中存储有以下可
被上位机/处理器执行的指令:用于执行如上项所述的一种数据处理方法的步骤。
[0054]
与现有技术相比,本发明的有益效果为:
[0055]
本发明公开了一种基于毫米波雷达的车用无线充电装置周围生物体检测系统,通过时空对齐和相似度计算将多个毫米波雷达感知的信息融合,得到的生物体信息更加准确,不仅提高了感知范围,还降低了误警率;在车辆周围以车辆底部为基础向上划定了物理围栏,通过生物体高度信息剔除了车身抖动和开关后备箱对感知结果的干扰,增加了系统报警准确性;结合生物体速度信息制定了变时距报警策略,增加了系统的反应时间,提高了系统的预警性能;在保证无线充电安全的同时,有效地解决了多雷达信息难以融合、车身抖动点云无法消除、预警策略过于简单等问题。
附图说明
[0056]
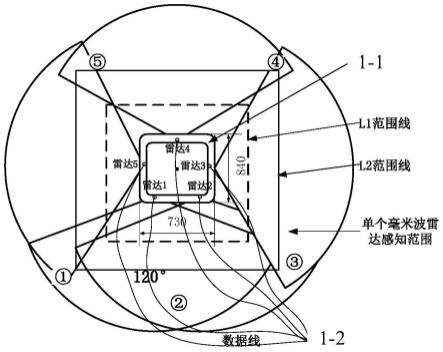
图1为本发明的结构示意图;
[0057]
图2为本发明的流程图;
[0058]
图3为本发明的物理围栏的设置示意图;
[0059]
图4为本发明的报警效果图。
具体实施方式
[0060]
下面对本发明进行详细阐述,以使本发明的优点和特征能更易于被本领域技术人员理解,从而对本发明的保护范围做出更为清楚明确的界定。
[0061]
以下给出一个或多个方面的简要概述以提供对这些方面的基本理解。此概述不是所有构想到的方面的详尽综览,并且既非旨在指认出所有方面的关键性或决定性要素亦非试图界定任何或所有方面的范围。其唯一的目的是要以简化形式给出一个或多个方面的一些概念以为稍后给出的更加详细的描述之序。
[0062]
如图1-4所示,基于毫米波雷达的车用无线充电装置周围生物体检测系统,包括:
[0063]
无线充电装置外壳1-1;
[0064]
多个毫米波雷达,分布在无线充电装置外壳1-1四周,并安装在无线充电装置外壳1-1内部,通过无线充电装置外壳1-1起到保护毫米波雷达的作用;
[0065]
上位机1-2;
[0066]
多个毫米波雷达分别与上位机1-2输入端相连,通过毫米波雷达采集无线充电装置周围生物体信息并对采集到的原始点云进行处理,处理步骤包括三维傅里叶变换、恒虚警检测、点云聚类和物体跟踪,得到动态点云、静态点云和目标物信息,动态点云信息包括距离、方位角、俯仰角和速度,静态点云信息包括物体x、y、z坐标,目标物信息包括物体x、y、z三个方向上的坐标和速度;多个毫米波雷达将动态点云、静态点云和目标物三类信息传输至上位机1-2进行数据处理并执行报警策略:静态点云信息表示毫米波雷达检测到的静态生物体,目标物信息表示毫米波雷达检测到的动态生物体,上位机1-2首先对多毫米波雷达感知到的静态生物体和动态生物体信息进行融合,然后消除车身抖动产生的干扰点云,得到生物体准确的位置和速度信息,最后,上位机1-2根据生物体信息,通过变时距预警算法实现无线充电装置周围危险区域内生物体入侵报警。
[0067]
上位机进行数据处理并执行报警策略的步骤包括:
[0068]
1)多个毫米波雷达数据时间对齐
[0069]
上位机1-2控制串口对多个毫米波雷达的数据依次读取,每个毫米波雷达的读取时间为一个极短的固定值,读取完所有雷达感知到的信息后,近似认为这段时间内所有雷达的信息为同一时刻信息,完成时间对齐。
[0070]
2)多个毫米波雷达数据空间对齐
[0071]
为了将多个毫米波雷达分别感知到的生物体信息统一到一个坐标系下,首先以无线充电装置外壳中心为原点建立全局坐标系,然后通过旋转和平移变换,将每个毫米波雷达基于自身局部坐标系感知到的生物体信息转换为全局坐标系下信息,实现多个毫米波雷达的空间对齐。三种典型的变换包括:
[0072]
①
平移变换:
[0073]
x1=x+t
x
[0074]
y1=y+ty[0075]
式中,x1为平移后的生物体横坐标,y1为平移后的生物体纵坐标,x为平移前的生物体横坐标,y为平移前的生物体纵坐标,t
x
为x轴的平移量,ty为y轴的平移量;
[0076]
②
旋转变换:
[0077]
x2=x
·
cosθ-sinθ
[0078]
y2=x
·
sinθ+y
·
cosθ
[0079]
式中,x2为旋转后的生物体横坐标,y2为旋转后的生物体纵坐标,x为旋转前的生物体横坐标,y为旋转前的生物体纵坐标,θ为旋转的角度;
[0080]
③
平移加旋转变换:
[0081]
x3=x
·
cosθ-y
·
sinθ+t
x
[0082]
y3=x
·
sinθ+y
·
cosθ+ty[0083]
式中,x3为变换后的生物体横坐标,y3为变换后的生物体纵坐标,x为旋转前的生物体横坐标,y为旋转前的生物体纵坐标,θ为旋转的角度,t
x
为x轴的平移量,ty为y轴的平移量;
[0084]
3)多个毫米波雷达信息融合处理
[0085]
在完成多个毫米波雷达信息时空对齐后,通过马氏距离对毫米波雷达感知重叠区域中被重复检测到的生物体信息进行相似度分析,实现静态点云融合和目标物融合:
[0086]
(1)静态生物体信息融合时使用的参数为静态点云在x、y、z方向上的坐标,马氏距离计算公式为:
[0087][0088]
式中,α和β为重复检查区域内两个毫米波雷达静态点云坐标构成的矩阵,∑为α和β之间的协方差矩阵:
[0089]
设定一个阈值,当计算得到的马氏距离小于该阈值时,认为两个毫米波雷达检测到的是同一个静态生物体,否则认为两个毫米波雷达检测到的不是同一个静态生物体;
[0090]
(2)动态生物体融合时使用的参数为目标物坐标x、y、z位置信息、目标物速度v以
及速度的方向γ,马氏距离计算公式为:
[0091][0092]
式中,η和ξ为重复检查区域内两个毫米波雷达检测到的目标物x、y、z位置信息、目标物速度v以及速度方向γ构成的矩阵,∑为η和ξ之间的协方差矩阵为:
[0093][0094]
与静态生物体融合时相同,设定一个阈值,当计算得到的马氏距离小于阈值时,认为两个毫米波雷达检测到的是同一个动态生物体,否则认为两个毫米波雷达检测到的不是同一个动态生物体。
[0095]
4)车身抖动消除
[0096]
以车底为基准向上设置物理围栏,摒除上下车及开关后备箱带来车身的振动。将静态生物体和动态生物体信息中z轴坐标值与围栏底部高度进行比较,若静态生物体和动态生物体z轴坐标高于围栏底部,则删去围栏内的所有静态生物体和动态生物体,保留物理围栏外的静态生物体和动态生物体。物理围栏的长和宽根据车辆的长和宽来确定,物理围栏底部的高度稍矮于车辆底盘高度。
[0097]
5)报警范围划定
[0098]
以无线充电装置外壳1-1为中心,分别向外延伸l1和l2的距离,其中l2大于l1。将延伸后l1包络和l2包络之间的区域设定为报警区域,l1与l2的长度可根据需求灵活调整。
[0099]
6)变时距预警策略
[0100]
通过毫米波雷达读取到的动态生物体实时速度信息为基准构造投影线来预测动态生物体位置,投影线的长度与动态生物体移动速度呈指数级关系。投影线长度计算公式为:
[0101]
l
obj
=t
·v[0102]
t=k
·v[0103]
l
obj
=k
·
v2[0104]
式中,l
obj
为投影线的长度,t为投影时间,v为动态生物体的速度,k为调整系数。
[0105]
7)报警执行
[0106]
报警区域内有动态点云、静态生物体和动态生物体三类感知信息,其中,动态点云不触发报警机制。当静态生物体和动态生物体投影线端点出现在报警范围并持续时间达到一定时间内时,发出报警。
[0107]
实施例1
[0108]
如图1所示,基于毫米波雷达的车用无线充电装置周围生物体检测系统,包括:
[0109]
无线充电装置外壳1-1,其尺寸为:长84cm、宽73cm、高12cm;
[0110]
5个ti iwr6843毫米波雷达,分别记为雷达1、雷达2、雷达3、雷达4、雷达5,该5个毫米波雷达分布在无线充电装置外壳1-1四周,并安装在无线充电装置外壳1-1内部,通过无
线充电装置外壳1-1起到保护毫米波雷达的作用,通过毫米波雷达采集生物体信息;
[0111]
上位机1-2,优选s32k144上位机;
[0112]
数据线;
[0113]
上位机1-2输入端分别通过数据线连接5个ti iwr6843毫米波雷达,通过上述5个毫米波雷达采集无线充电装置周围生物体信息并对采集到的原始点云进行处理,处理步骤包括三维傅里叶变换、恒虚警检测、点云聚类和物体跟踪,得到动态点云、静态点云和目标物信息,动态点云信息包括距离、方位角、俯仰角和速度,静态点云信息包括物体x、y、z坐标,目标物信息包括物体x、y、z三个方向上的坐标和速度;所有毫米波雷达将所得动态点云、静态点云和目标物三类信息均传输至上位机1-2进行如下数据处理并执行报警策略:静态点云信息表示毫米波雷达检测到的静态生物体,目标物信息表示毫米波雷达检测到的动态生物体,上位机1-2首先对毫米波雷达感知到的静态生物体和动态生物体信息进行融合,然后消除车身抖动产生的干扰点云,得到生物体准确的位置和速度信息,最后,上位机1-2根据生物体信息,通过变时距预警算法实现无线充电装置周围危险区域内生物体入侵报警。
[0114]
上位机1-2进行数据处理并执行报警策略的步骤包括:
[0115]
1)5个毫米波雷达时间对齐
[0116]
上位机1-2控制串口对5个毫米波雷达的数据依次读取,每个毫米波雷达的读取时间为一个极短的固定值,本实施例的读取时间设定为1ms,读取完所有毫米波雷达感知到的信息后,近似认为这段时间内所有毫米波雷达的信息为同一时刻信息,完成时间对齐。
[0117]
2)5个毫米波雷达空间对齐
[0118]
为了将多个毫米波雷达分别感知到的生物体信息统一到一个坐标系下,首先以无线充电装置外壳中心点为原点建立全局坐标系,然后通过旋转和平移变换,将每个毫米波雷达基于自身局部坐标系感知到的生物体信息转换为全局坐标系下信息,实现多个毫米波雷达的空间对齐。本实施例中,雷达5感知信息顺时针旋转90
°
并且向右平移0.345m;雷达3感知信息逆时针旋转90
°
并且向左平移0.345m;雷达1感知信息顺时针旋转180
°
,然后再向上平移0.28m,最后右平移0.274m;雷达2感知信息逆时针旋转180
°
,然后向上平移0.28m,最后向左平移0.274m;雷达4感知信息向下平移0.28m。
[0119]
平移加旋转的变换公式为:
[0120]
x3=x
·
cosθ-y
·
sinθ+t
x
[0121]
y3=x
·
sinθ+y
·
cosθ+ty[0122]
式中,x3为变换后的生物体横坐标,y3为变换后的生物体纵坐标,x为旋转前的生物体横坐标,y为旋转前的生物体纵坐标,θ为旋转的角度,t
x
为x轴的平移量,ty为y轴的平移量。
[0123]
3)5个毫米波雷达信息融合处理
[0124]
在完成5个毫米波雷达信息时空对齐后,通过马氏距离对毫米波雷达感知重叠区域中被重复检测到的生物体信息进行相似度分析,实现静态生物体和动态生物体信息融合;
[0125]
(1)静态生物体融合时使用的参数为静态点云在x、y、z方向上的坐标,马氏距离计算公式为:
[0126][0127]
式中,α和β为重复检查区域内两个毫米波雷达静态点云坐标构成的矩阵,∑为α和β之间的协方差矩阵:
[0128]
本实施例中设定相似度阈值为2,当计算得到的马氏距离小于该阈值时,认为两个毫米波雷达检测到的是同一个静态生物体,否则认为两个毫米波雷达检测到的不是同一个静态生物体。
[0129]
(2)动态生物体融合时使用的参数为目标物坐标x、y、z位置信息、目标物速度v以及速度的方向γ,马氏距离计算公式为:
[0130][0131]
式中,η和ξ为重复检查区域内两个毫米波雷达检测到的目标物x、y、z位置信息、目标物速度v以及速度方向γ构成的矩阵,∑为η和ξ之间的协方差矩阵:
[0132][0133]
与静态生物体融合时相同,设定相似度阈值为2,当计算得到的马氏距离小于该阈值时,认为两个毫米波雷达检测到的是同一个动态生物体,否则认为两个毫米波雷达检测到的不是同一个静态生物体。
[0134]
4)车身抖动点云消除
[0135]
以车底为基准向上设置物理围栏,摒除上下车及开关后备箱带来车身的振动。物理围栏的长和宽根据车辆的长和宽来确定,物理围栏底部的高度稍矮于车辆底盘高度。本实施例中,物理围栏的范围如图3所示,围栏的宽度设置为5m,长度设置为3.5m,围栏底部高度设置为0.5m,围栏总高度设置为2.5m。将静态点云和目标物信息中z轴坐标值与围栏底部高度进行比较,若静态生物体和动态生物体z轴坐标高于围栏底部,则删去围栏内的所有静态生物体和动态生物体信息,保留物理围栏外的静态生物体和动态生物体。
[0136]
5)报警范围划定
[0137]
本实施例中,以无线充电装置外壳为中心,分别向外延伸0.6m和0.8m的距离,将两个延伸范围中间的区域设定为报警区域,如图1所示。
[0138]
6)变时距预警策略
[0139]
通过毫米波雷达读取到的动态生物体实时速度信息为基准构造投影线来预测动态生物体位置,投影线的长度与动态生物体移动速度呈指数级关系。投影线长度计算公式为:
[0140]
l
obj
=t
·v[0141]
t=k
·v[0142]
l
obj
=k
·
v2[0143]
式中,l
obj
为投影线的长度,t为投影时间,v为动态生物体的速度,k为调整系数。本实施例中,t=2s,调整系数k=0.8。
[0144]
7)报警执行
[0145]
报警区域内有动态点云、静态生物体和动态生物体三类感知信息,其中,动态点云不触发报警机制。当静态生物体和动态生物体投影线端点出现在报警范围并持续时间达到1s时,发出报警。本实施例中,报警范围内的检测效果如图4所示,图4中空心圆点表示目标物,即动态生物体;空心方框表示静态点云,即静态生物体。
[0146]
本发明未具体描述的部分或结构采用现有技术或现有产品即可,在此不做赘述。
[0147]
以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1