电性源半航空瞬变电磁法接收线圈噪声校正方法及系统
1.本发明属于电法勘探领域,特别是涉及一种电性源半航空瞬变电磁法接收线圈噪声校正方法及系统。
背景技术:
2.半航空瞬变电磁法(semi-airborne transient electromagnetic method,s-atem)是一种利用敷设于地表的回线源或接地导线源发射电磁脉冲信号,利用有人或无人飞行器携带接收设备在空中接收的混合系统。敷设于地表的发射源利用脉冲电流激励大地,同时通过空中的接收系统采集大地的响应,通过地下介质响应确定地下目标体。s-atem法既具有地面电磁法(electromagnetic method,em)发射功率大、探测深度大等优点,又具有航空电磁法(airborne electromagnetic method,aem)探测效率高、适用范围广等优点,广泛用于基础地质调查、矿产资源勘查、油气勘查,以及水文、工程、环境勘查等领域,然而现有的探测系统在使用过程中仍然存在一些不足:
3.吊舱式直升机半航空瞬变电磁法勘探系统通过直升机吊挂发射线圈,发射大功率的磁场信号激励地下介质,地下介质因为涡流效应会产生二次场。同时,利用接收装置接收二次场信号,实现对地下介质电阻率结构的解释。z分量接收线圈是时间域航空电磁法勘探系统的核心检测部件,固定于十字型支架上,在飞行中由于受到风力影响会发生偏航、俯仰和滚转等姿态变化,因切割地磁场引起感应磁通量变化,呈现为在测量数据中存在运动噪声的干扰。因此,精确地获取因z分量接收线圈感应磁通量的实时变化量,从而实现对运动噪声的抑制,成为了航空时间域电磁法勘探系统的一个重要研究方向。
技术实现要素:
4.为实现上述目的,本发明提供了如下方案:一种电性源半航空瞬变电磁法接收线圈噪声校正方法及系统,包括:
5.发射源按照既定波形发射与接收线圈产生互感效应,基于所述互感效应所产生的影响,获得互感噪声;
6.根据接收线圈的位置变化情况,获得所述接收线圈与地面之间的耦合变化;根据所述耦合变化,获得所述接收线圈内产生感应电压而形成的运动噪声;
7.基于所述互感噪声和所述运动噪声进行校正,实现所述接收线圈的噪声校正。
8.优选地,所述发射源按照既定波形发射与接收线圈产生互感效应的过程包括,所述发射源s1s2根据发射波形,发射电流,方向为x轴方向,源长为l;所述接收线圈中心点a位置坐标为(x,y,z),经过a点与x-y面互相垂直的面与s1s2相交的点为a0,坐标为(x,0,0),夹角为角为角为分别与x轴的夹角为θ1、θ2。
9.优选地,基于所述互感效应所产生的影响,获得互感噪声的过程包括,
10.当所述发射源开始发射,电流幅值陡增,所述接收线圈rx出现发射前沿产生的互
感电流,基于所述互感电流,使所述rx充当磁偶极子发射源,向地下发射电磁场;当所述发射源停止供电,电流幅值陡降,发射源与所述rx互感,所述rx是一个极小的中心点为a的线圈,产生bp互感磁场;当电流幅值为零时,所述rx作为磁偶极子发射源,持续接收来自发射源发射的电磁场与大地耦合产生的信号,所述rx接收发射源与rx发射的电磁场与大地的耦合信号,获得互感噪声。
11.优选地,所述互感效应的影响大小基于互感公式计算互感磁场值、电压及电流判断;
12.所述互感公式包括:
[0013][0014][0015][0016]
ψ=nmi
source
[0017][0018]
φr=sb
zp
[0019]
sm=ns
[0020]
式中,ε
mutual
是线圈内互感而来的互感电压,i
mutual
为互感电流,r是线圈电阻,l是线圈总长,s
section
线圈导线截面积,ρ是线圈电阻率,ψ是磁通链,m是发射源在rx的互感系数,φr是穿过rx的互感磁通量,有效面积sm由线圈面积s与匝数相乘获得。
[0021]
优选地,根据接收线圈的位置变化情况,获得所述接收线圈与地面之间的耦合变化的过程包括,
[0022]
建立笛卡尔惯性坐标系x-y-z,所述接收线圈在空中飞行基于受到风、空气阻力、飞行器姿态发生变化使得所述接收线圈与飞行装置发生位置相对变化,使坐标系发生变化变为x'-y'-z';
[0023]
所述接收线圈包括x-接收装置、y-接收装置、z-接收装置;
[0024]
根据接收线圈的位置变化情况,获得不同的运动形式;所述运动形式包括摆动、倾斜、偏航。
[0025]
优选地,根据所述耦合变化,获得所述接收线圈内产生感应电压而形成的运动噪声的过程包括,
[0026]
基于不同的运动形式获得运动系数矩阵,对所述运动系数矩阵进行降维,获得降维矩阵;
[0027]
基于所述降维矩阵获得发射源产生的二次场与接收线圈内的电压;基于所述电压获得运动前后接收线圈内的电压关系式,根据所述电压关系式,获得对应的运动噪声。
[0028]
一种电性源半航空瞬变电磁法接收线圈噪声校正系统,包括:
[0029]
噪声采集模块,用于采集互感噪声、运动噪声;
[0030]
噪声校正模块,基于所述互感噪声、运动噪声进行校正,实现所述接收线圈的噪声
校正。
[0031]
优选地,所述噪声采集模块包括互感噪声采集单元、运动噪声采集单元;
[0032]
所述互感噪声采集单元用于通过发射源按照既定波形发射与接收线圈产生互感效应,基于所述互感效应所产生的影响,获得互感噪声;
[0033]
所述运动噪声采集单元用于根据接收线圈的位置变化情况,获得所述接收线圈与地面之间的耦合变化;根据所述耦合变化,获得所述接收线圈内产生感应电压而形成的运动噪声。
[0034]
本发明公开了以下技术效果:
[0035]
本发明提供的一种电性源半航空瞬变电磁法接收线圈噪声校正方法及系统,发射源按照既定波形发射与接收线圈产生互感效应,基于互感效应所产生的影响,获得互感噪声;根据接收线圈的位置变化情况,获得接收线圈与地面之间的耦合变化;根据耦合变化,获得接收线圈内产生感应电压而形成的运动噪声;基于互感噪声和运动噪声进行校正,实现接收线圈的噪声校正。本发明与现有技术相比,具有精度高、实时性强和便于操作的优点;能够实现接收数据的时间同步,在保证数据吻合的基础上便于工作人员进行现场数据处理和分析,从而采取相应的补偿措施,达到抑制运动噪声的目的。
附图说明
[0036]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0037]
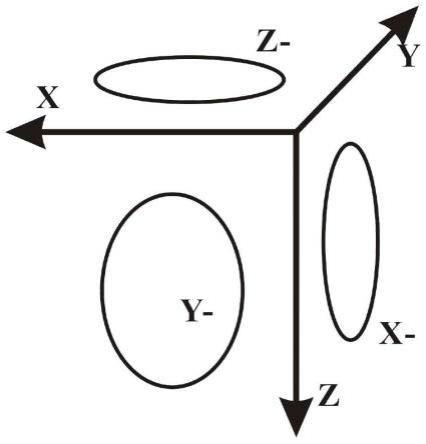
图1为本发明实施例的接收装置示意图;
[0038]
图2为本发明实施例的发射波形示意图;
[0039]
图3为本发明实施例的发射电源和接收线圈互感示意图;
[0040]
图4为本发明实施例的正演发射波形示意图;
[0041]
图5为本发明实施例的均匀半空间互感响应响应影响图;
[0042]
图6为本发明实施例的层状低阻互感响应响应影响图;
[0043]
图7为本发明实施例的层状高阻互感响应响应影响图;
[0044]
图8为本发明实施例的接收装置的不同运动形式示意图;
[0045]
图9为本发明实施例的接受装置受地磁场影响的折线图;
[0046]
图10(a)-(f)为本发明实施例的接收装置受不同运动形式线圈的几何响应影响折线图。
具体实施方式
[0047]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0048]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实
施方式对本发明作进一步详细的说明。
[0049]
如图1-2所示,本发明提供了一种电性源半航空瞬变电磁法接收线圈噪声校正方法,包括:
[0050]
当发射电源按照既定波形发射时,会由于在极短的时间内发射和关断而产生发射源s与接收线圈tx的互感效应。如图2,电流会在极短的时间内上升到isource,同样会在turn-off time里变为零,而和和这个极短的时间量级为nm级,这样会在接收线圈内产生一个较强的互感电压,电压的产生则会使该接收线圈充当发射电源的功能,从而影响接收线圈接收来自于电磁场与大地耦合得到的信号。
[0051]
如图3所示,建立笛卡尔坐标系,发射源s1s2根据发射波形,发射一系列电流,方向为x轴方向,源长为l。接收线圈中心点a位置坐标为(x,y,z),经过a点与x-y面互相垂直的面与s1s2相交的点为a0,坐标为(x,0,0),夹角为,坐标为(x,0,0),夹角为,坐标为(x,0,0),夹角为分别与x轴的夹角为θ1、θ2。
[0052]
如图4-7所示,假设发射波形的占空比为0.5,当发射源开始发射,电流幅值突然陡增,接收线圈rx中会出现发射前沿产生的逆时针互感电流,线圈中互感电流的存在,会暂时使得rx充当磁偶极子发射源,向地下(向上发射的电磁场暂时不考虑)发射电磁场,这时,发射源持续供电,电流稳定在isource,互感电流被淹没在短暂的稳恒电流中,在此期间,rx接收到了自己发射出去,又与大地产生耦合带来的信号,我们认为一次场信号要远远大于刚刚自感带来的信号,所以发射前沿所带来的互感效应并没有带来“噪声”。
[0053]
当发射源停止供电,电流幅值陡降,在turn-off time中,发射源s1s2又与rx互感,若rx是一个极小可以认为是一个中心点为a的线圈,可以产生bp互感磁场,但是rx此时为有效面积为sm的水平放置的线圈,则垂直互感磁场bzp的关系为
[0054][0055]
当电流幅值为零时,rx又再一次成为“磁偶极子发射源”,而此时rx又要持续接收来自发射电源发射的电磁场与大地耦合产生的信号,在经过某一极小时间段后,rx接收的则是发射源与rx两个源发射的电磁场与大地的耦合信号的相耦合信号,这样就带来了“噪声”。
[0056]
所以首先要计算出互感磁场值、电压及电流,进而可以知道互感效应影响大小。互感公式包括:
[0057][0058][0059][0060]
ψ=nmi
source
[0061][0062]
φr=sb
zp
[0063]
sm=ns
[0064]
上式中,ε
mutual
是线圈内互感而来的互感电压,i
mutual
为互感电流,r是线圈电阻,l是线圈总长,s
section
线圈导线截面积,ρ是线圈电阻率,ψ是磁通链,m是发射源在rx的互感系数,φr是穿过rx的互感磁通量,有效面积sm由线圈面积s与匝数相乘得来。
[0065]
当有限直导线与线圈互感时,根据毕奥-萨法尔公式
[0066][0067][0068][0069][0070]
当然,上式为接收线圈在空中平行大地铺设,用z-表示,当然还有平行于x-z面的y-和平行于y-z的x-装置形式。所以公式可以写成
[0071][0072]
v可分别表示x-,y-,z-装置形式为(1,0,0)
t
,(0,1,0)
t
,(0,0,1)
t
。
[0073]
当接收线圈因为运动而产生的噪声,称之为运动噪声。当吊舱或者固定线圈发生位置变化的时候,会改变线圈与地面之间的耦合,并且由于线圈在地磁场中的这种突然的变化,改变了与地磁场穿过线圈的有效面积,导致接收线圈内产生感应电压从而形成噪声。
[0074]
电性源地空瞬变电磁法的接收装置如图1所示,在笛卡尔惯性坐标系内接收装置可以分为x-,y-,z-三种刚性装置形式,线圈在空中飞行由于受到风、空气阻力、飞行器姿态突然发生变化等使得接收线圈出现如图8所示的三种基本运动形式(roll、pitch and yaw),飞行方向与x轴一致,当接收装置与飞行装置发生相对运动的时候,坐标系发生了变化,x-y-z变成了x'-y'-z'。
[0075]
以z-装置为例,摆动(roll)是指当线圈飞行时,在飞行方向两侧(y轴方向)受到力而以z轴为旋转轴在y-z平面上做钟摆运动,这个力可能是由于侧面的风力或者飞行器突然左右运动等造成的。倾斜(pitch)是指工作线圈在飞行方向的上下方受到力,与roll不同的是,线圈在x-z平面上做钟摆运动,造成这种运动的原因是飞行器在飞行方向上受到阻力或突然的加速、急停等。偏航(yaw)是指由于线圈飞行方向的变化,即x轴突然受到两侧的风或者飞行器转向等原因,使得线圈围绕z轴在x-y平面上出现位移。一般学者会认为上述三种线圈的变化改变的仅仅影响的是接收来自大地与发射电流耦合的信号,忽略了地磁场的作
用。
[0076]
基于公式中推导线圈出现上述运动会发生怎样的变化。当接收装置与飞行装置发生相对运动的时候,笛卡尔惯性坐标系x-y-z变成了x'-y'-z',所以坐标系中物理量在运动前后可表示为b=cb',c
roll
、c
pitch
、c
yaw
分别代表三种运动形式,我们可以称之为运动系数矩阵
[0077][0078][0079][0080]
b'
t
=(b'
x
,b'y,b'z,δb'
x
,δb'y,δb'z,ε
x
,εy,εz),
[0081]
b=(b
x
,by,bz),
[0082]
ε
γx
=0,
[0083][0084][0085][0086][0087]
ε
αx
=0,
[0088]
ε
βx
=ε
βy
=ε
βz
=0,
[0089]
式中,b是未发生变化的磁感应强度,b'是发生线圈运动后的磁感应强度,δb'
x
、δb'y、δbz'分别是在线圈运动之后,坐标系发生空间上的位移,由于地下介质不均匀而造成的磁感应磁强度的变化;ε
x
、εy、εz是由于发生运动变化而产生的感应电压。
[0090]
由于在实际飞行勘探过程中,线圈中心点的位移远远小于点距,信号反映的地质体或者变化没有发生改变,所以我们可以认为线圈发生与飞行器的相对运动时,仅仅为旋转变化而忽略中心点的位移,地下介质不均匀而造成的磁感应磁强度的变化可认为为零。于是我们可以把上式(运动系数矩阵)降维为
[0091][0092][0093][0094]
b'
t
=(b'
x
,b'y,b'z,ε
x
,εy,εz),
[0095]
由上式可知,c可由两个子矩阵构成a是旋转矩阵,e是单位阵。根据欧拉定理(euler’s theory),在坐标变换中,任意一种旋转变换都可以归结为若干个沿着坐标轴旋转的组合,组合的个数不超过三个并且两个相邻的旋转必须沿着不同的坐标轴。因此,可以用三个沿着坐标轴旋转的角度来表示一个变换,根据这个角度(欧拉角,euler angles)和旋转矩阵的关系,原来坐标系中任意矢量的改变可以等价于一个旋转矩阵的作用,线圈的任何运动,都可以用这三个基本运动刻画,并且可以表示为相应三个旋转矩阵的乘积,即可用b=a
rollapitchayaw
b'p
t
,p根据不同装置,(1,0,0)、(0,1,0)、(0,0,1)分别代表x-、y-、z-装置形式。
[0096]
根据法拉第电磁感应定律(faraday’s law),发射源产生的二次场与接收线圈内的电压可表示为
[0097]
v=-iωsmbp
t
,
[0098]
上式没有线圈运动时,我们应该得到的信号,当发生线圈运动时,我们得到的信号为
[0099]
v'=-iωsmb'p
t
+εp
t
,
[0100]
当我们将公式(roll装置形式)(旋转矩阵)代入上式
[0101]vx
=v'
x
,
[0102]vy
=cosγ(v'
y-ε
γy
)-sinγv'z,
[0103]vz
=cosγ(v'
z-ε
γz
)+sinγv'y,
[0104]
上式为三种接收装置在roll运动前后线圈内电压关系式。很明显,x-装置接收到的信号并不受roll运动影响,接收线圈没有在x轴上产生有效面积的变化,而在y轴和z轴上有变化,从而引入了地磁产的影响;并且之前单纯测得的信号,现在夹杂着另外方向的信号,y-装置接收的信号不单单是y方向的信号,同样掺杂着z方向的信号,z-装置同样有这样的现象。
[0105]
将公式(pitch装置形式)(旋转矩阵)代入上式(二次信号式)
[0106]vx
=cosα(v'
x-ε
αx
)+sinαv'z,
[0107]vy
=v'y,
[0108]vz
=cosα(v'
z-ε
αz
)-sinαv'
x
,
[0109]
上式为三种接收装置在pitch运动前后线圈内电压关系式。y-装置在经过pitch运动信号并没有变化,pitch运动使得接收信号x分量和z分量混杂在一起,这与roll运动的影响一样。
[0110]
将公式(yaw装置形式)(旋转矩阵)代入上式(二次信号式)
[0111]vx
=cosβv'
x
+sinβv'y,
[0112]vy
=cosβv'
y-sinβv'
x
,
[0113]vz
=v'z,
[0114]
在上述yaw运动后的各装置圈内电压关系式中,z-装置接收的信号没有发生变化,信号混杂的现象依然发生。也就是说,当某一装置发生运动,如果忽略其他方向信号混入时,实际信号与目的信号是余弦(或余切)关系,根据实际信号与目的信号之间的关系在对接收线圈进行校正时,具有重要意义。
[0115]
根据地磁场影响表达式代入某地的地磁场各参数,magnetic-filed strength is 52508.7nt,declination is-3
°
39',inclination is 52
°
53',δt取1s,得出各接收装置受地磁场影响产生随角度变化的归一化电压图。如图9所示,仅有两种线圈运动方式(roll and pitch)可以出现地磁场影响,并与角度正相关;在roll运动中,只有y-和z-受到地磁场影响,x-并没有因为roll运动而产生接收有效面积的变化;roll运动里,受地磁场影响是随角度周期变化的,周期为2π,y-装置受地磁场影响的极值在处,z装置的极值在处;pitch运动中,y-装置没有受到地磁场的影响,x-装置的极值在z-装置的极值在在接收线圈受到小角度变化时,z-装置抵抗地磁场干扰的能力要比x-、y-装置强;从幅值上看,roll、pitch运动可以对响应衰减曲线晚期产生严重的影响。
[0116]
利用100ωm的均匀半空间一维正演响应进行分析,发射源1000m,发射电流10a,偏移距500m,得到正常响应和受到接收线圈发生roll运动5度时的响应(没有加入地磁场影响)。可以看出,在y-装置时,roll运动影响最明显的是受到返回电流的时候;通过分析了0.0001s和0.1s两个时刻,响应随运动变化角的变化关系,可以看到,受影响的信号呈周期变化,当受到小角度影响,随着角度越大,受影响信号越远离正常信号。在z-装置中,受到5度roll运动后的响应在早期受到非常大的影响,roll的存在使得响应在早期由正值突然变化到负值;并且,不论是早期还是晚期时刻,响应随着角度的变化最终出现负值,这就说明了在实测数据出现负号时,有可能是由于运动噪声引起的。
[0117]
当接收线圈发生pitch运动时,x-装置会出现假返回电流现象,在晚期的影响远远大于早期的影响;z-装置在早期的时候则受影响的程度稍微大一些。yaw运动出现时,x-同样会出现由于响应出现负值而产生的假返回电流现象。
[0118]
所以,单一出现线圈运动时,z-装置在roll运动时会出现响应变号;x-装置如果受到线圈运动的影响时,在某一个角度上,响应一定有变号现象,进而出现了假返回电流现
象;y-装置则不会出现变号。在小角度的变化中,z-装置在早期的影响要大于晚期;y-装置影响最大的地方则是返回电流影响最大的时刻。接收装置受不同运动形式线圈的几何响应影响折线图如图10各图所示。
[0119]
以上所述的实施例仅是对本发明的优选方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1