一种高分辨率人体传感器的制作方法
1.本技术涉及传感器领域,尤其涉及一种高分辨率人体传感器。
背景技术:
2.人体传感器是智能家居、安防系统中经常使用的组件,目前市面上绝大部分人体传感器采用红外热释电传感器作为感应元件,它能够根据照射的红外光输出相应的电压信号,人体传感器根据电压信号的变化判断是否有人经过。
3.红外热释电传感器的探测范围很小,其有效探测距离一般只有1m,所以,在实际应用中,需要在红外热释电传感器前方加装透镜片以增加人体传感器的探测距离,并在透镜片上设置透镜单元以检测人体。然而现有相关技术中,人体传感器的透镜单元的分布方式不合理导致探测角度分散,探测区域的指向性不强,进而导致现有人体传感器的分辨率较低,无法感应到人体的小幅度运动,给用户带来不便。
技术实现要素:
4.为了解决现有技术的人体传感器分辨率较低的问题,本发明提供一种高分辨率人体传感器,包括:透镜件,包括用于接收光照的第一表面;感应件,能够响应于红外辐射而输出相应的电压信号;所述透镜件朝向所述感应件的一面构造有多个透镜单元,所述第一表面接收的光经由所述透镜单元汇聚至所述感应件,以检测人体;所述透镜单元至少包括与所述感应件正对设置的第一透镜单元以及沿所述第一透镜单元的边缘向外依次设置的第二透镜单元、第三透镜单元和第四透镜单元;
5.所述第四透镜单元的中轴线对应位置与所述第一透镜单元的中轴线之间的距离设为 l1,所述感应件包括朝向所述透镜件设置的第二表面,所述第一透镜单元与所述第二表面之间的垂直距离设为s1;所述第一表面为平面或者球壳面,其曲率半径设为r1;所述第一表面的中心与边缘处的高度差设为h1;则满足关系式:s1/l1≥0.9,且0≤h1/r1≤ 0.15。
6.进一步地,所述透镜单元的数量大于或者等于27。
7.进一步地,所述透镜单元的数量大于或者等于34。
8.进一步地,所述第二透镜单元有多个,围绕第一透镜单元的外缘环形设置;所述第三透镜单元有多个,围绕第二透镜单元的外缘环形设置;所述第四透镜单元有多个,围绕第三透镜单元的外缘环形设置;
9.进一步地,所述透镜单元构造为菲涅尔透镜单元,所述菲涅尔透镜单元包括一圆形凸起以及与所述圆形凸起同心设置的至少一环形齿,所述第一表面接收的光经由所述圆形凸起和/或所述环形齿汇聚至所述感应件;
10.进一步地,所述透镜单元构造为凸透镜单元,所述第一表面接收的光经由所述凸透镜单元汇聚至所述感应件;
11.进一步地,所述第四透镜单元的中轴线设置于靠近所述第一透镜单元的一侧。
12.进一步地,所述第三透镜单元的中轴线设置于靠近所述第一透镜单元的一侧。
13.进一步地,所述透镜件的所述第一表面为平面,所述第一透镜单元与所述第二表面之间的垂直距离s1满足关系式:s1/l1≥1.1。
14.进一步地,其特征在于,还包括:壳体,所述透镜件盖设于所述壳体形成一容纳腔;无线通信单元,与所述感应件电连接,并被设置为能够响应于所述感应件输出的电压信号而对外发送无线信号;供电单元,与所述感应件以及所述无线通信单元电连接,用于提供电能;所述感应件、所述无线通信单元以及所述供电单元被容置于所述容纳腔。
15.本发明的有益效果至少包括:
16.(1)本发明提供的高分辨率人体传感器,通过控制s1/l1≥0.9,且0≤h1/r1≤0.15,使得人体传感器的探测角度更集中,分辨率更高,提高了人体传感器对人体的小幅度运动感应灵敏度,用户的使用体验更佳。
17.(2)本发明实施例的感应件采用四元热释电传感器,每一透镜单元对应产生4个探测区域,探测区域数量增多使得人体传感器的探测分辨率得以提高,进而人体传感器对人体小幅度运动探测灵敏度更高。
18.(3)本发明实施例将透镜件的所述第一表面设置为平面,即h1/r1=0,从而进一步缩小探测角度,使得探测区域更集中,以提高人体传感器的分辨率。
19.(4)本发明实施例控制所述透镜单元的数量大于或者等于27,在其它一些优选实施例中,控制所述透镜单元的数量大于或者等于34,更多的透镜单元数量能够提供更多的检测区域数量,从而保证人体传感器具有更高的分辨率。
20.(5)所述第四透镜单元的中轴线设置于靠近所述第一透镜单元的一侧;进一步地,所述第三透镜单元的中轴线设置于靠近所述第一透镜单元的一侧,且所述第二透镜单元的中轴线设置于靠近所述第一透镜单元的一侧。这样设计的有益效果在于,能够使第二透镜单元、第三透镜单元和第四透镜单元对应的探测区域向第一透镜单元对应位置偏移,使得探测区域更加集中,探测区域的分布密度更高,进而提高人体传感器的分辨率,同时,探测角度变小,便于用户调整人体传感器的检测范围。
21.(6)通过控制透镜单元中轴线的偏移,使得探测区域出现交织重叠的现象,能够进一步提升人体传感器对人体小幅度运动的探测灵敏度。
附图说明
22.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
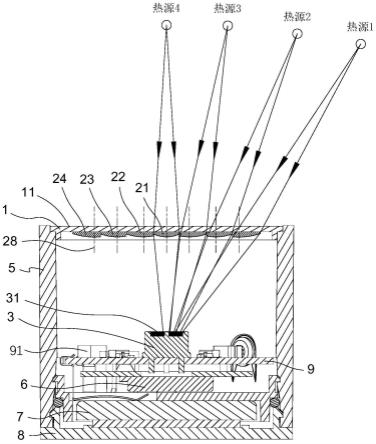
23.图1是本发明实施例的剖视图;
24.图2是本发明实施例的结构示意图;
25.图3是本发明实施例的凸透镜折射原理示意图;
26.图4是本发明实施例的探测区域产生原理示意图;
27.图5是本发明实施例的探测区域分布示意图;
28.图6是本发明实施例的图5中的v部局部放大图;
29.图7是本发明实施例的图5中的a-a截面图;
30.图8是本发明实施例的感应件结构示意图;
31.图9是本发明实施例的探测角度示意图;
32.图10是本发明实施例的探测角度示意图;
33.图11是本发明实施例的透镜件结构示意图;
34.图12是本发明实施例的透镜件结构示意图;
35.图13是本发明实施例的探测区域分布图;
36.图14是本发明实施例的等齿距菲涅尔透镜单元结构示意图;
37.图15是本发明实施例的等齿高菲涅尔透镜单元结构示意图;
38.图16是本发明实施例的透镜件结构示意图;
39.图17是本发明实施例的结构示意图;
40.图18是本发明实施例的探测区域分布图;
41.图19是本发明实施例的结构示意图;
42.图20是本发明实施例的探测区域分布图;
43.图21是本发明实施例的结构示意图;
44.图22是本发明实施例的探测区域分布图;
45.图23是本发明实施例的结构示意图;
46.图24是本发明实施例的探测区域分布图;
47.图25是本发明实施例的结构示意图;
48.图26是本发明实施例的探测区域分布图。
49.附图标记:
50.1、透镜件;11、第一表面;2、透镜单元;21、第一透镜单元;22、第二透镜单元; 23、第三透镜单元;24、第四透镜单元;25、第五透镜单元;26、菲涅尔透镜单元;261、环形齿;262、第一母线;27、凸透镜单元;271、副光轴;28、中轴线;3、感应件;31、第二表面;32、正感温单元;33、负感温单元;4、探测区域;5、壳体;6、无线通信单元;7、供电单元;8、底座;9、电路板;91、处理单元。
具体实施方式
51.在本发明的描述中,术语“内”、“外”、“水平”、“竖直”、“上”、“下”、“顶”、“底”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明而不是要求本发明必须以特定的方位构造和操作,因此不应当理解为对本发明的限制。
52.在本发明说明书的描述中,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性或隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”、“第三”等的特征可以明示或者隐含地包括一个或者更多个该特征。
53.在本发明说明书的描述中,除非另有明确的规定和限定,术语“连接”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接或可以互相通讯;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
54.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完
整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其它实施例,都属于本发明保护的范围。
55.基于图1-图26,本公开所提出的一种高分辨率人体传感器被具体阐释。具体地,如图1和图2所示,所述高分辨率人体传感器包括:透镜件1,包括用于接收光照的第一表面11;感应件3,能够响应于红外光的照射而输出感应信号;处理单元91,与所述感应件3电连接,并被设置为能够响应于所述感应信号而检测人体;所述透镜件1朝向所述感应件3的一面构造有多个透镜单元2,所述第一表面11接收的光经由所述透镜单元2汇聚至所述感应件3;所述透镜单元2至少包括与所述感应件3正对设置的第一透镜单元212 以及沿所述第一透镜单元212的边缘向外依次设置的第二透镜单元222、第三透镜单元232 和第四透镜单元242;所述第四透镜单元242的中心与所述第一透镜单元212的中轴线28 之间的距离设为l1,所述感应件3包括朝向所述透镜件1设置的第二表面31,所述第一透镜单元212与所述第二表面31之间的垂直距离设为s1;所述第一表面11为平面或者弧面,其曲率半径设为r1;所述第一表面11的中心与边缘处的高度差设为h1;则r1、 l1和h1共同被设置为:s1/l1≥0.9,且0≤h1/r1≤0.15,使得人体传感器的探测角度更集中,分辨率更高,提高了人体传感器对人体的小幅度运动感应灵敏度,用户的使用体验更佳。
56.如图1和图2所示,本发明实施例采用的透镜单元2可以是凸透镜单元272、菲涅尔透镜单元262或者是其它可聚光的透镜单元2,所述中轴线28可以理解为透镜单元2的回转中心线;具体的,当所述透镜单元2为凸透镜单元272时,所述中轴线28即凸透镜单元272的主光轴;当所述透镜单元2为菲涅尔透镜单元262时,如图14和图15所示,菲涅尔透镜单元262包括位于中心的圆形凸起以及与圆形凸起同心的环形齿261,所述中轴线28可以理解为所述圆形凸起或者所述环形齿261的中轴线28,所述中轴线28也可以理解为菲涅尔透镜单元262的主光轴。值得注意的是,如图2所示,所述第四透镜单元242的中心可以理解为,第四透镜单元242的中轴线28所在位置,或者也可以是第四透镜单元242的几何中心所在位置。所述处理单元91与所述感应件3电连接可以理解为,处理单元91与感应件3采用可导电的连接方式,例如焊接电路板连接,使得两者之间能够传输所述感应信号。
57.如图1所示,本实施例对人体传感器的工作原理进行如下说明:当人体从热源1的位置经热源2和热源3的位置运动到热源4的位置,人体发出的红外光通过对应的透镜单元 2汇聚至感应件3,于感应件3的所述第二表面31汇聚成红外光斑,人体的移动会引起红外光斑在第二表面31上运动,第二表面31设置有正感温单元32和负感温单元33,能够响应于红外光的照射输出相应的电压信号;所述处理单元91能够响应于所述感应信号而检测人体可以理解为,处理单元91具有电压放大器,能够对感应件3输出的电压信号进行放大处理,并根据电压信号的变化判断是否有人经过。所以当人体传感器的分辨率较小时,人体小幅度运动使得相应的红外光斑的位移变化较小,感应件3输出的电压波动太小,人体传感器将感应不到人体的存在;相反,人体传感器的分辨率越高,探测区域4分布越密集(如图5所示),人体小幅度运动可使相应的红外光斑变化明显,感应件3输出的电压波动较大,人体传感器更易于感应到人体存在,即分辨率越高的人体传感器对人体小幅度运动感应越灵敏。人体传感器的分辨率对用户的使用体验有至关重要的作用,如当用户在看书、看电视或者上厕所时,由于运动幅度较小,低分辨率的人体传感器将感应不到人体的存在,从而引起其它设
备的错误操作;而高分辨率的人体传感器可以有效解决这个问题。
58.如图4和图5所示,发明人发现,人体传感器的分辨率与探测区域4数量、探测角度以及热源与人体传感器的距离有直接关系,具体关系为:当探测角度和探测距离固定时,探测区域4数量越多,单位角度内的探测区域4分布越密集,人体传感器的分辨率越高,即探测区域4数量与人体传感器的分辨率呈正相关;当探测区域4数量和探测距离固定时,探测角度越大,探测区域4分布越分散,人体传感器的分辨率越低,即探测角度与人体传感器的分辨率呈负相关;当探测区域4数量和探测角度固定时,热源距离人体传感器越远,探测区域4投射出的面积越大,单位面积内的探测区域4数量越少,即热源与人体传感器的距离与人体传感器的分辨率负相关。但热源与人体传感器的距离是根据用户位置变化的,并非产品所能控制,因此,本发明实施例通过增加人体传感器的探测区域4数量和减小探测角度来提高人体传感器的分辨率。
59.如图3所示,根据凸透镜的折射原理:与凸透镜的主光轴平行的光线,可被凸透镜汇聚到焦点;与副光轴271平行的光线,可被凸透镜汇聚到焦平面上的副焦点;所述主光轴为一条垂直穿过凸透镜中心的轴线,所述焦平面为垂直于主光轴且位于主焦点所在位置的平面;所述副光轴271为平行于入射光线且穿过光心的轴线。根据上述原理,当已知透镜单元2的焦距时,可绘制任一入射光的副光轴271,并根据副光轴271与焦平面的交点绘制出该入射光对应的出射光。常规情况下,为使透镜单元2的聚光效果更佳,感应件3 的所述第二表面31一般设置在透镜单元2的焦点处,即第二表面31一般设置在焦平面所处位置。
60.如图4所示,根据上文所述的凸透镜聚光原理,正感温单元32和负感温单元33经第一透镜单元212折射后产生的两个扇形区域,分别是明区和暗区,位于明区的热源发出的红外光经第一透镜单元212能够至少部分汇聚至所述正感温单元32,从而促使正感温单元32发生电荷转移,产生正电压;位于暗区的热源发出的红外光经第一透镜单元212能够至少部分汇聚至所述负感温单元33,从而促使负感温单元33发生电荷转移,产生负电压。明区与暗区重叠的区域为重叠区,位于重叠区的热源发出的红外光一部分汇聚至正感温单元32,产生正电压,另一部分汇聚至负感温单元33,产生负电压。明区与暗区之间存在盲区,位于盲区的热源发出的红外光汇聚至正感温单元32与负感温单元33之间,此时会出现检测不到热源的情况。当一热源从图4中暗区的上方进入暗区时,该热源发出的红外光在第二表面31汇聚形成的光斑由负感温单元33的下方进入负感温单元33所在区域;当该热源位于暗区时,负感温单元33感应到红外辐射而产生负电压。当热源朝向远离透镜件1的方向运动时,热源在第二表面31形成的光斑逐渐变小,当热源朝向靠近透镜件1的方向运动时,热源在第二表面31形成的光斑逐渐变大,其中存在一位置,使得热源在第二表面31形成的光斑正好覆盖正感温单元32或者负感温单元33。
61.进一步地,正感温单元32和负感温单元33表面覆盖有一层滤光片(图中未示出),用于将一部分除红外光以外的其它光线过滤,从而降低其它光线的干扰。
62.根据上述原理,如图4-图7所示,所述感应件3在各透镜单元2的折射作用下,产生若干个明区和暗区,即所述探测区域4。
63.为提升探测区域4数量,本发明一优选实施例的感应件3采用四元热释电传感器(如图8所示),在其它实施例中,感应件3可以是二元热释电传感器或是一元热释电传感器。其中,四元热释电传感器具有两个正感温单元32和两个负感温单元33,二元热释电传感器
具有一个正感温单元32和一个负感温单元33,一元热释电传感器仅具有一个正感温单元32或者一个负感温单元33。若所述感应件3采用二元热释电传感器,每一透镜单元2 对应产生2个探测区域4,若所述感应件3采用一元热释电传感器,每一透镜单元2对应产生1个探测区域4;在本实施例中,感应件3采用四元热释电传感器,每一透镜单元2 对应产生4个探测区域4,探测区域4数量增多使得人体传感器的探测分辨率得以提高,进而人体传感器对人体小幅度运动探测灵敏度更高。本实施例采用的透镜件1如图2所示,其具有27个透镜单元2,其中包括1个第一透镜单元212、6个第二透镜单元222、8个第三透镜单元232以及12个第四透镜单元242,如图5、图6和图7所示,所述感应件3 在透镜单元2的折射下,产生108个探测区域4,如图7所示为图5所示的探测区域4的 a-a截面图,可以看出,探测区域4的分布与透镜单元2的分布相对应,且由于各透镜单元2的光轴偏向透镜件1的中心位置,所以位于中心的探测区域4分布较为集中,出现了多个探测区域4交织重叠的现象,当人体处于中心的探测区域4时,其发出的红外光同时通过多个透镜单元2汇聚至正感温单元32和负感温单元33,形成多个红外光斑,当人体做出动作时,相应的红外光斑在正感温单元32和负感温单元33上运动,感应件3输出波动的电压信号,使得人体传感器感应到人体,这种多个探测区域4交织重叠的设计能够进一步提升对人体小幅度运动的探测灵敏度。
64.根据上文所述的凸透镜聚光原理,得到图9中热源5辐射出的红外光的光路图,由图 9可以看出,热源5处于一极限位置,其汇聚的红外光斑正好能够接触正感温单元32的边缘,当热源5向左移动,其汇聚的红外光斑将向右移动,进而照射至正感温单元32,使人体传感器感应到热源的存在,所以,图中热源5所处位置为人体传感器探测角度的边界位置。由凸透镜折射原理可知,探测角度的边界线平行于图中最外围透镜单元2的光心与正感温单元32边缘处的连线,即最外围透镜单元2的光心与正感温单元32或负感温单元33边缘连线的斜度能够直接决定探测角度。基于此,本发明实施例控制s1/l1≥0.9,使得第四透镜单元242的光心与正感温单元32边缘处的连线相对于第一透镜单元212中轴线28的斜度较小,从而使得探测角度较小,以提升人体传感器的分辨率,在本实施例中,人体传感器的探测角度为80
°
。所述第一透镜单元212与所述第二表面31之间的垂直距离s1可以理解为,第一透镜单元212的底端与第二表面31之间的垂直距离,或是第一透镜单元212的中心与第二表面31之间的垂直距离。所述第二表面31即图9中感应件3的上表面,被设置为感应件3用于感应红外光的一面。
65.值得注意的是,如图19和图25所示,透镜件1还包括沿第四透镜单元242的外缘向外依次设置的第五透镜单元252、第六透镜单元2或者更多的透镜单元2,只要第四透镜单元242满足关系式s1/l1≥0.95,均在本发明保护范围内。
66.另外,所述透镜单元2包括与所述感应件3正对设置的第一透镜单元212可以理解为,所述的正对设置可以是一个第一透镜单元212与所述感应件3正对设置,也可以是多个第一透镜单元212与所述感应件3正对设置,当所述第一透镜单元212有多个时,多个第一透镜单元212组合起来共同与所述感应件3正对设置。
67.如图10和图25所示,发明人发现,当透镜件1为球壳形时,所述第一表面为圆弧形,各透镜单元2呈弧形排布,人体传感器的探测角度与透镜件1的弧度有关,当透镜件1 的弧度较大时,第四透镜单元242的光心与感应件3的所述第二表面31的距离更近,第四透镜单元242的光心与正感温单元32边缘处的连线相对于第一透镜单元212中轴线28 的斜度更
大,导致探测角度更大,即探测角度与透镜件1的弯曲弧度正相关,本发明通过控制透镜件1的第一表面11的所述h1与所述第一表面11的曲率半径r1满足关系式0 ≤h1/r1≤0.15,使得探测角度被控制在一适合的范围内,从而提高人体传感器的分辨率。
68.在一些优选实施例中,如图17、图19、图21和图23所示,所述透镜件1的所述第一表面11为平面,所述第一透镜单元212与所述第二表面31之间的垂直距离s1满足关系式:s1/l1≥1.1。其中,透镜件1的所述第一表面11为平面,即h1/r1=0,从而进一步缩小探测角度,使得探测区域4更集中,以提高人体传感器的分辨率。而s1/l1≥1.1 使得探测角度进一步缩小,使得人体传感器的分辨率进一步提高。
69.在一些实施例中,如图11和12所示,透镜件1具有19个透镜单元2,仅包括1个第一透镜单元212、6个第二透镜单元222和12个第三透镜单元232,所述感应件3采用四元热释电传感器,能够产生76个探测区域4,所述第一表面11为球壳面,其曲率半径为r1;第一表面11的中心与边缘处的高度差h1满足关系式:0≤h1/r1≤0.15。本实施例人体传感器的探测区域4分布如图13所示,虽然该实施例的探测区域4数量较少,但得益于探测角度较小,使其仍具有较为密集的探测区域4分布,能够达到较高分辨率。
70.在一些实施例中,如图2、图21和图23所示,所述透镜单元2的数量大于或者等于 27。更多的透镜单元2数量能够提供更多的检测区域数量,从而保证人体传感器具有更高的分辨率。在一优选实施例中,如图2所示,透镜件1具有27个透镜单元2,其中包括1 个第一透镜单元212、6个第二透镜单元222、8个第三透镜单元232以及12个第四透镜单元242,所述感应件3采用四元热释电传感器,能够产生108个探测区域4,其感应区域分布如图7所示。在另一优选实施例中,如图21所示,透镜件1具有31个透镜单元2,其中包括1个第一透镜单元212、8个第二透镜单元222、10个第三透镜单元232以及12 个第四透镜单元242,所述感应件3采用四元热释电传感器,能够产生124个探测区域4,其感应区域分布如图22所示。在又一优选实施例中,如图23所示,透镜件1具有29个透镜单元2,其中包括1个第一透镜单元212、8个第二透镜单元222、8个第三透镜单元 232以及12个第四透镜单元242,所述感应件3采用四元热释电传感器,能够产生116 个探测区域4,其感应区域分布如图24所示。
71.在一些实施例中,如图17、图19所示,所述透镜单元2的数量大于或者等于34。增加透镜单元2的数量能够增加检测区域的数量,从而提高人体传感器的分辨率。在一优选实施例中,如图17所示,透镜件1具有35个透镜单元2,其中包括1个第一透镜单元212、6个第二透镜单元222、10个第三透镜单元232以及18个第四透镜单元242,所述感应件3采用四元热释电传感器,能够产生140个探测区域4,其感应区域分布如图 18所示。在另一优选具体实施例中,如图19所示,透镜件1具有43个透镜单元2,其中包括1个第一透镜单元212、6个第二透镜单元222、8个第三透镜单元232、12个第四透镜单元242以及16个第五透镜单元252,所述感应件3采用四元热释电传感器,能够产生172个探测区域4,其感应区域分布如图20所示。在又一优选具体实施例中,如图25 所示,透镜件1具有55个透镜单元2,其中包括1个第一透镜单元212、6个第二透镜单元222、12个第三透镜单元232、18个第四透镜单元242以及18个第五透镜单元252,所述感应件3采用四元热释电传感器,能够产生220个探测区域4,其感应区域分布如图 26所示。
72.进一步地,如图2-图25所示,所述第二透镜单元222有多个,围绕第一透镜单元212 的外缘环形设置;所述第三透镜单元232有多个,围绕第二透镜单元222的外缘环形设置;所
述第四透镜单元242有多个,围绕第三透镜单元232的外缘环形设置。采用环形设置的有益效果为:各透镜单元2之间排布更加紧凑,提高透镜件1表面的利用率;且能够使透镜单元2分布均匀,相应的检测区域分布均匀,防止出现检测区域疏密不均的情况。
73.在一些实施例中,如图16-图23所示,所述透镜单元2构造为菲涅尔透镜单元262,所述菲涅尔透镜单元262包括一圆形凸起以及与所述圆形凸起同心设置的至少一环形齿 261,所述第一表面11接收的光经由所述圆形凸起和/或所述环形齿261汇聚至所述感应件3。其中,菲涅尔透镜又称螺纹透镜,相比于普通透镜,其主要特点是透光率高、轻薄、体积小。如图14和图15所示,菲涅尔透镜的形成原理是:平凸透镜的有效折射发生在其凸面上,可将该凸面的曲率保留,删减内部无光学作用的材料,将产生光学作用的凸面呈圆环切段后向底部平移而形成一圈圈的环形齿261,从而形成菲涅尔透镜,菲涅尔透镜可以看做是减薄的凸透镜。由其原理可知,菲涅尔透镜的每个环形齿261均保留了凸透镜相应的曲率特性,却更轻薄。
74.所述透镜单元2采用菲涅尔透镜单元262,有利于增大透镜单元2的面积,以及减薄透镜单元2的厚度,增加透光率,提升透镜单元2的聚光性能,从而提升人体传感器的探测距离。本发明实施例采用的菲涅尔透镜包括等齿距菲涅尔透镜(图14)和等齿高菲涅尔透镜(图15),所述等齿距菲涅尔透镜可以理解为,两相邻的所述环形齿261之间的齿距相等,环形齿261间隔均匀,这样设置的好处在于设计方便,加工方便,且为了降低加工难度,可将环形齿261的弧面简化为锥面加工。但等齿距设计的缺点在于,靠近边缘的环形齿261的齿高大于中心的环形齿261,导致靠近边缘的环形齿261透光率小于中心的环形齿261。所述等齿高菲涅尔透镜可以理解为,两相邻的所述环形齿261的齿高h相等,这样设计的好处在于,透镜单元2中心部位的斜度较小,所以透镜单元2中心的较大的面积无需切割环形齿261,呈现为一圆形凸起,加工难度较低,中心部位在加工时无需将弧面简化为锥面,所以聚光性能更好,且圆形凸起为连续曲面,没有经过切割,具有更好的聚光性。但是等齿高菲涅尔透镜在靠近边缘处环形齿261的齿距很小,加工难度太大,所以在设计小型的等齿高菲涅尔透镜时,齿数不会很多,因此不利于做薄。
75.在本实施例中,设计各环形齿261的齿距范围为0.2~0.6mm,以保证易加工性,同时避免夫琅禾费衍射对透镜单元2的聚光性能产生较大影响。
76.由于本技术实施例采用的菲涅尔透镜不用于成像技术,仅用于汇聚光线,为降低加工难度和加工成本,将菲涅尔透镜的第一母线262由弧线简化为直线段(如图14所示),简化后对透镜单元2的聚光性能有一定影响,但仍然能够达到人体传感器的使用条件。而对于等齿高的菲涅尔透镜,如图15所示,由于其中心部位的弧度较小,所以会在等齿高菲涅尔透镜的中心形成一小凸透镜,小凸透镜的高度与其它环形齿261的齿高相等。由于该小凸透镜面积较大,加工难度不高,所以在设计等齿高菲涅尔透镜时,可仅将环形齿 261的母线简化,而不简化其中心的小凸透镜,使得菲涅尔透镜在保证易加工的前提下,进一步提升聚光性能。
77.在一些实施例中,如图23所示,所述第三透镜单元232的所述中轴线28穿过所述第三透镜单元232的中心。其中,所述第三透镜单元232的中心可以是第三透镜单元232 的几何中心,或者是第三透镜单元232的靠近中心的位置。这样设置的好处在于,在采用等齿距菲涅尔透镜时,有利于减小第三透镜单元232边缘处的环形齿261齿高,使得第一透镜单元
212、第二透镜单元222、第三透镜单元232边缘处的环形齿261齿高相差不大,以便于三者边缘处的衔接,从而降低加工难度,不会出现为了降低齿高而被迫调整焦距的情况,有利于精准控制各透镜单元2的焦距。
78.在一些实施例中,如图16、图17、图19和图21所示,所述第四透镜单元242的中轴线28设置于靠近所述第一透镜单元212的一侧;进一步地,所述第三透镜单元232的中轴线28设置于靠近所述第一透镜单元212的一侧,且所述第二透镜单元222的中轴线 28设置于靠近所述第一透镜单元212的一侧。这样设计的有益效果在于,能够使第二透镜单元222、第三透镜单元232和第四透镜单元242对应的探测区域4向第一透镜单元212 对应位置偏移,使得探测区域4更加集中,探测区域4的分布密度更高,进而提高人体传感器的分辨率,同时,探测角度变小,便于用户调整人体传感器的检测范围。如图18、图20和图22所示,为探测区域4分布图,由图可以看出,探测区域4向发生偏移后,探测区域4更加集中,出现了探测区域4交织重叠的现象,使得人体传感器的探测灵敏度更高。
79.在一些实施例中,如图2、图12和图25所示,所述透镜单元2构造为凸透镜单元272,所述第一表面11接收的光经由所述凸透镜单元272汇聚至所述感应件3。相比于菲涅尔透镜单元262,采用凸透镜单元272的好处在于,便于加工磨具和注塑,降低加工成本。在一优选实施例中,如图2所示,所述第二透镜单元222、第三透镜单元232和第四透镜单元242的中轴线28设置于靠近第一透镜单元212一侧。这样设计的有益效果在于,能够使第二透镜单元222、第三透镜单元232和第四透镜单元242对应的探测区域4向第一透镜单元212对应位置偏移,使得探测区域4更加集中,探测区域4的分布密度更高,进而提高人体传感器的分辨率,同时,探测角度变小,便于用户调整人体传感器的检测范围。如图7所示,为本实施例的探测区域4分布图,由图可以看出,探测区域4向发生偏移后,探测区域4更加集中,出现了探测区域4交织重叠的现象,使得人体传感器的探测灵敏度更高。
80.进一步地,如图2-图25所示,各所述透镜单元2之间拼接设置,使得所述透镜件1 的有效折射面的占比更高,透镜件1内侧表面的利用率更高,进而提升人体传感器的探测距离和灵敏度。其中,各透镜单元2之间的拼接方式可以是多边形拼接、弧形拼接或者其它可实施的拼接方式。
81.进一步地,如图1和图8所示,所述感应件3为四元热释电传感器,所述第二表面 31设置有呈x形交叉分布的两个所述正感温单元32和两个所述负感温单元33,所述第一透镜单元212的中心于所述第二表面31的投影被包围于所述正感温单元32与所述负感温单元33之间。使得人体传感器的探测区域4沿感应件3的中心轴线对称分布,探测角度更加可控。
82.在一些实施例中,如图16-图23所示,第三透镜单元232的外缘与透镜件1的边缘具有一段距离未设置透镜单元2,这样设计的有益效果在于:在注塑时便于脱模,降低磨具的加工难度;能够缩小探测角度,探测指向性更强,以便用户在使用时调整检测范围。
83.进一步地,所述透镜件1由白色半透明材质或者黑色透明材质一体成型。其中,使用白色半透镜材质,可以防止人体传感器内部的电子元件暴露,且白色半透明材质的透光性好,对探测距离具有增益效果,在一具体实施例中,透镜件1采用白色半透明的hdpe 高密度聚乙烯一体注塑成型。另外,透镜件1采用黑色透明材质,可以掩饰透镜件1内侧的光学纹路,同时可以防止人体传感器内部的电子元件暴露,且透明材质的透光性好,对探测距离具有增益效果。
84.进一步地,如图1所示,所述高分辨率人体传感器还包括:壳体5,所述透镜件1盖设于所述壳体5形成一容纳腔;无线通信单元6,与所述处理单元91电连接,能够对外发射无线信号;供电单元7,与所述感应件3以及所述无线通信单元电连接,用于提供电能;所述感应件3、所述无线通信单元以及所述供电单元7被容置于所述容纳腔。其中,所述容纳腔可以是封闭的容纳腔,也可以是不封闭的容纳腔;所述电连接可以理解为能够导电的连接方式,包括通过电路板9焊接、导线连接、接触式导电连接或者其它可实施的方式。当感应件3输出的电压信号大于一阈值时,处理单元91判断有人经过,则无线通信单元6对外发送无线信号。所述供电单元7可以采用电池模组供电,也可以采用接线模组连接外部电源。所述壳体5包括底座8,所述底座8设置于所述壳体5的远离所述透镜件1的一端,用于连接外部安装面,其连接方式可以是固定连接或是可拆卸连接。
85.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1