巡检载具的雷达导航定位方法、装置、设备和存储介质与流程
本发明涉及导航控制领域,特别涉及巡检载具的雷达导航定位方法、装置、设备和存储介质。
背景技术:
1、巡检机器人等巡检载具通过设有雷达装置,可以基于雷达导航定位技术,来高效的完成设备日常巡检和特殊故障查明等工作,可以及时发现仪表异常,设备故障、有害气体泄漏、温度异常等安全隐患;不但可以极大降低运维人员的工作压力与强度,还可以高效提升安全防护等级。
2、当巡检机器人用于石油化工行业等易燃易爆的应用场景时,其整个车体及传感器都需要根据防爆要求进行特殊设计,这种根据防爆要求进行特殊设计的巡检机器人也就是防爆机器人。防爆机器人的防爆结构和传感器保护设计中,主要包括车体防爆密封、激光雷达防爆保护罩、传感器保护罩设等防爆部件。
3、发明人经过研究发现,现有技术中的防爆机器人至少还存在以下缺陷:
4、激光雷达设置防爆保护罩后会使得探测距离衰减,并由此导致在进行雷达匹配定位时会存在环境特征匮乏等问题,进而降低了雷达导航定位的稳定性和可靠性。
5、公开于该背景技术部分的信息仅仅旨在增加对本发明的总体背景的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域一般技术人员所公知的现有技术。
技术实现思路
1、本发明的目的在于可以提高设有激光雷达的防爆机器人的导航定位的稳定性和可靠性。
2、本发明提供了一种巡检载具的雷达导航定位方法,包括步骤:
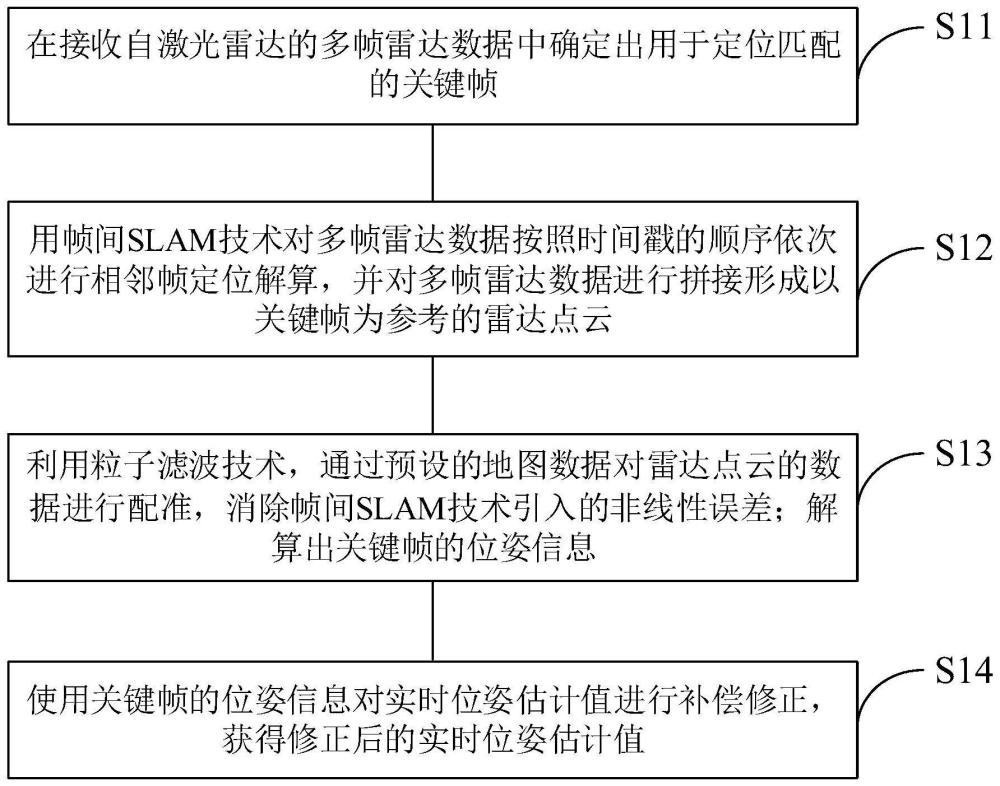
3、s11、在接收自激光雷达的多帧雷达数据中确定出用于定位匹配的关键帧;
4、s12、用帧间slam技术对多帧雷达数据按照时间戳的顺序依次进行相邻帧定位解算,并对多帧雷达数据进行拼接形成以所述关键帧为参考的雷达点云;
5、s13、利用粒子滤波技术,通过预设的地图数据对雷达点云的数据进行配准,消除帧间slam技术引入的非线性误差;解算出所述关键帧的位姿信息;
6、s14、使用所述关键帧的位姿信息对实时位姿估计值进行补偿修正,获得修正后的实时位姿估计值。
7、优选的,在本发明中,所述激光雷达设于防爆机器人、电力巡检车或矿场巡检车。
8、优选的,在本发明中,所述防爆机器人的激光雷达包括防爆保护罩。
9、优选的,在本发明中,所述防爆保护罩为玻璃防护罩,或,由玻璃和金属条组合而成的保护罩。
10、优选的,在本发明中,所述预设的地图数据由地图测绘分模块生成,包括:
11、根据成场地地图的成图生成场地三维地图;所述场地三维地图用于为路径规划和定位导航提供先验路线知识。
12、优选的,在本发明中,所述地图测绘分模块包括cartographer算法子模块,所述cartographer算法子模块包括local slam单元和global slam单元,其中:
13、所述local slam单元用于:
14、利用里程计和imu数据进行轨迹推算,给出巡检载具的位姿估计值;
15、将位姿估计值作为初值,对雷达数据进行匹配解算,得到最优的巡检载具位姿;
16、雷达数据经过运动滤波后,进行叠加,形成子图;
17、所述global slam单元用于:
18、回环检测;
19、后端优化,根据全部的子图形成一张完整可用的场地三维地图。
20、优选的,在本发明中,所述使用所述关键帧的位姿信息对实时位姿估计值进行补偿修正,包括:
21、根据所述关键帧的位姿信息,求解补偿系数,修正消除传感器的累计误差和随机漂移;
22、根据所述补偿系数对实时位姿估计值进行修正。
23、在本发明的另一面,还提供了一种巡检载具的雷达导航定位装置,包括:
24、关键帧确定单元,用于在接收自激光雷达的多帧雷达数据中确定出用于定位匹配的关键帧;
25、雷达点云拼接单元,用于用帧间slam技术对多帧雷达数据按照时间戳的顺序依次进行相邻帧定位解算,并对多帧雷达数据进行拼接形成以所述关键帧为参考的雷达点云;
26、关键帧位姿解算单元,用于利用粒子滤波技术,通过预设的地图数据对雷达点云的数据进行配准,消除帧间slam技术引入的非线性误差;解算出所述关键帧的位姿信息;
27、位姿修正单元,用于使用所述关键帧的位姿信息对实时位姿估计值进行补偿修正,获得修正后的实时位姿估计值。
28、优选的,在本发明中,所述预设的地图数据由地图测绘分模块生成,包括:
29、根据成场地地图的成图生成场地三维地图;所述场地三维地图用于为路径规划和定位导航提供先验路线知识。
30、优选的,在本发明中,所述地图测绘分模块包括cartographer算法子模块,所述cartographer算法子模块包括local slam单元和global slam单元,其中:
31、所述local slam单元用于:
32、利用里程计和imu数据进行轨迹推算,给出巡检载具的位姿估计值;
33、将位姿估计值作为初值,对雷达数据进行匹配解算,得到最优的巡检载具位姿;
34、雷达数据经过运动滤波后,进行叠加,形成子图;
35、所述global slam单元用于:
36、回环检测;
37、后端优化,根据全部的子图形成一张完整可用的场地三维地图。
38、优选的,在本发明中,所述使用所述关键帧的位姿信息对实时位姿估计值进行补偿修正,包括:
39、根据所述关键帧的位姿信息,求解补偿系数,修正消除传感器的累计误差和随机漂移;
40、根据所述补偿系数对实时位姿估计值进行修正。
41、在本发明实施例的另一面,还提供了一种巡检载具的雷达导航定位设备,包括:
42、存储器,用于存储计算机程序;
43、处理器,用于调用并执行所述计算机程序,以实现如上任一项所述的巡检载具的雷达导航定位方法的各个步骤。
44、在本发明实施例的另一面,还提供了一种存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时,实现如上任一项所述的巡检载具的雷达导航定位方法的各个步骤。
45、所述巡检载具的雷达导航定位设备包括存储在介质上的计算机程序,所述计算机程序包括程序指令,当所述程序指令被计算机执行时,使所述计算机执行以上各个方面所述的方法,并实现相同的技术效果。
46、与现有技术相比,本发明具有如下有益效果:
47、本发明采用帧间slam和粒子滤波技术相结合的方式,来消除帧间slam技术引入的非线性误差;同时,还通过解算出关键帧的位姿信息,然后根据关键帧的位姿信息来对实时位姿进行修正,从而在激光雷达的性能受到防爆保护罩影响的情况下还能获得较高的定位精度,从也就提升了导航定位系统的稳定性和可靠性。
48、上述说明仅为本发明技术方案的概述,为了能够更清楚地了解本发明的技术手段并可依据说明书的内容予以实施,同时为了使本发明的上述和其他目的、技术特征以及优点更加易懂,以下列举一个或多个优选实施例,并配合附图详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!