一种水上动态高光谱测量仪及测量方法与流程
1.本发明涉及科学观测技术领域,具体涉及一种水上动态高光谱测量仪及测量方法。
背景技术:
2.当今,光学技术在海洋科学中的应用不断发展,海洋光学对于海洋物理过程、生物过程、化学过程和地质过程等的研究都具有非常大的价值,发挥着重要的作用。测量及解释海水的光学特性,已经成为并且仍将是海洋科学的一个富有挑战性的研究方向。海水表观的光学性质取决于海水的固有光学性质和海中辐射场的分布,这是因为海水中的浮游植物、悬浮泥沙及溶解物能够吸收和/或散射来自于太阳系统的自然光,因此会对水下光场及穿越水气界面的向上辐亮度光谱产生深刻的影响。获取高精度的水体离水辐亮度或遥感反射率等光学特性,然后通过反演其光谱获得水体的水色要素及关联物的浓度参数,最终为水环境与水生态的监测、分类、评价与预测预警以及气候变化的研究等服务。
3.海水表观的光学测量任务的一个重要参数是光谱遥感反射率rrs(λ),其中λ为光的波长。所有地球物理产品均衍生自多个光谱波段的rrs(λ)的各种组合,例如,叶绿素浓度是通过光谱的蓝色和绿色区域的波段比率或差异得出的。在海水表观的光学测量中,rrs(λ)定义为:
4.rrs(λ,θs,θv,φ)=lw(λ,θs,θv,φ)/es(λ,θs);
5.其中,es(λ,θs)为太阳天顶角θs的水上向下的辐照度,也即下降辐射;lw(λ,θs,θv,φ)为太阳天顶角θs、天底角θv和太阳与测量垂直面之间的方位角差φ的离水辐亮度,其与天空辐射lsky以及水面辐射lu密切相关。因此,大多数时候,都是通过测量下降辐射es、天空辐射lsky以及水面辐射lu,来获得所需的光谱遥感反射率rrs。
6.现有技术中,测量所需的下降辐射es、天空辐射lsky以及水面辐射lu时,大多是使用地物光谱仪将探头分时测量水面、天空以及标准参考板,极大地依靠测量人员的经验,对测量人员提出了较高的要求,且测量数据的同步性差,由于测量环境的不同步性,引入了较大的测量误差,对测量结果的准确性带来了不利的影响。特别是在船载等因水浪产生抖动的测量场合,测量过程更加难以控制,且引入了不可忽略的人为误差,进一步地降低了测量结果的准确率。
技术实现要素:
7.为了克服现有技术的不足,本发明的目的在于提供一种水上动态高光谱测量仪,能够便于同步测量所需的下降辐射、天空辐射和水面辐射,并在测量的过程中保持测量仪与太阳方位角度的方位角,以提高测量结果的准确性。
8.为解决上述问题,本发明所采用的技术方案如下:一种水上动态高光谱测量仪,包括稳定支架、测量组件、gps模块、imu模块、驱动组件以及控制组件,测量组件包括旋转外壳以及安装于所述旋转外壳内的辐照度测量单元、第一辐亮度测量单元和第二辐亮度测量单
元,所述旋转外壳转动并摆动连接所述稳定支架,所述辐照度测量单元的信号采集方向向上,所述第一辐亮度测量单元的信号采集方向斜向上,所述第二辐亮度测量单元的信号采集方向斜向下;所述gps模块、所述imu模块、所述驱动组件与所述控制组件均设于所述旋转外壳,所述gps模块用于提供所述水上动态高光谱测量仪的utc、纬度和经度;所述imu模块包括陀螺仪、加速度计以及地磁场传感器,用于测量所述水上动态高光谱测量仪的运动姿态;所述驱动组件用于驱动所述旋转外壳、所述辐照度测量单元、所述第一辐亮度测量单元和所述第二辐亮度测量单元;所述控制组件电性连接所述gps模块、所述imu模块和所述驱动组件。
9.相比现有技术,本发明的有益效果在于:本测量仪集成了辐照度测量单元、第一辐亮度测量单元和第二辐亮度测量单元。辐照度测量单元的信号采集方向向上,用于测量下降辐射;第一辐亮度测量单元的信号采集方向斜向上,用于测量天空辐射,以便于观察天空辐射对水色的影响;第二辐亮度测量单元的信号采集方向斜向下,用于测量水面辐射;因此,本测量仪可以同时测得所需的下降辐射、天空辐射和水面辐射,以确定目标物体的遥感反射率,提高了测量数据的同步性,以提高测量的准确性。当进行水上动态测量时,也即船载等因水浪而产生抖动的测量场合,本测量仪可以通过gps模块测量设备当前的utc、纬度和经度,并通过imu模块测量当前的地磁朝向,并将所测得的utc、纬度、经度以及地磁朝向发送至控制组件,由控制组件控制驱动组件,并由驱动组件驱动旋转外壳相对稳定支架转动及摆动,以调节辐照度测量单元、第一辐亮度测量单元和第二辐亮度测量单元的采集角度,来保持测量仪与太阳方位角度的相对关系,从而保证测量的准确性。
10.上述的水上动态高光谱测量仪,所述稳定支架的第一端转动连接有套环,所述套环的内周沿周向分布有一圈齿牙;所述驱动组件包括用于驱动所述旋转外壳的第一驱动模块,所述第一驱动模块包括驱动电机、第一锥齿轮和第二锥齿轮,所述驱动电机安装于所述旋转外壳内,且所述驱动电机的输出端连接所述第一锥齿轮,所述第一锥齿轮与所述第二锥齿轮转动连接于所述旋转外壳的相对的两侧,且所述第一锥齿轮与所述第二锥齿轮均啮合连接所述套环的所述齿牙;所述套环能够相对所述稳定支架转动,以带动所述旋转外壳相对所述稳定支架摆动,所述驱动电机能够驱动所述第一锥齿轮转动,以使所述旋转外壳相对所述套环和所述稳定支架转动。
11.上述的水上动态高光谱测量仪,所述辐照度测量单元包括由外至内安装于所述旋转外壳内的余弦校正器和第一光电转换器,所述第一光电转换器能够接收来自所述余弦校正器的光信号;所述驱动组件还包括第二驱动模块,所述第二驱动模块电性连接所述第一光电转换器和所述控制组件。
12.上述的水上动态高光谱测量仪,所述旋转外壳的上端开设有第一阶梯通孔,所述余弦校正器通过第一安装块压紧安装于所述第一阶梯通孔内,且所述余弦校正器的上端面凸出于所述第一安装块的上端面,所述余弦校正器与所述第一阶梯通孔之间安装有第一密封圈。
13.上述的水上动态高光谱测量仪,所述第一光电转换器通过第二安装块连接于所述旋转外壳内,所述第二安装块开设有第二阶梯通孔,且所述第二阶梯通孔位于所述第一阶梯通孔的下方,所述第二阶梯通孔内安装有第一滤光片;所述余弦校正器所收集的光信号依次经过所述第一阶梯通孔与所述第一滤光片,并被所述第一光电转换器所接收。
14.上述的水上动态高光谱测量仪,所述第一辐亮度测量单元包括安装于所述旋转外壳内的第一辐亮度头以及由外至内安装于所述第一辐亮度头内的第一窗口玻璃、第一凸透镜和第二光电转换器;所述驱动组件还包括第三驱动模块,所述第三驱动模块电性连接所述第二光电转换器和所述控制组件;所述第二辐亮度测量单元包括安装于所述旋转外壳内的第二辐亮度头以及由内至外安装于所述第二辐亮度头内的第二窗口玻璃、第二凸透镜和第三光电转换器;所述驱动组件还包括第四驱动模块,所述第四驱动模块电性连接所述第三光电转换器和所述控制组件。
15.上述的水上动态高光谱测量仪,所述第一辐亮度头开设有第三阶梯通孔,所述第一窗口玻璃通过第一卡环安装于所述第三阶梯通孔内,且所述第一窗口玻璃与所述第三阶梯通孔之间安装有第二密封圈,所述第一凸透镜安装于所述第三阶梯通孔内,且所述第一凸透镜与所述第一窗口玻璃之间安装有第一轴套;所述第二辐亮度头开设有第四阶梯通孔,所述第二窗口玻璃通过第二卡环安装于所述第四阶梯通孔内,且所述第二窗口玻璃与所述第四阶梯通孔之间安装有第三密封圈,所述第二凸透镜安装于所述第四阶梯通孔内,且所述第四凸透镜与所述第二窗口玻璃之间安装有第二轴套。
16.上述的水上动态高光谱测量仪,所述第二光电转换器安装于所述第一辐亮度头的内端并位于所述第三阶梯通孔的内端,且所述第二光电转换器与所述第一凸透镜之间安装有第二滤光片;所述第三光电转换器安装于所述第二辐亮度头的内端并位于所述第四阶梯通孔的内端,且所述第三光电转换器与所述第二凸透镜之间安装有第三滤光片。
17.上述的水上动态高光谱测量仪,所述稳定支架包括悬臂和转轴,所述悬臂的第一端具有u型结构,所述转轴设有两组,两组所述转轴分别位于所述u型结构内相对的两侧,且所述转轴的第一端转动连接所述u型结构,所述转轴的第二端连接所述旋转外壳。
18.上述的水上动态高光谱测量仪,所述稳定支架还包括转动连接于所述悬臂的第二端的吊杆,所述悬臂的第二端转动连接所述吊杆,所述旋转外壳的转动轴线、所述转轴的转动轴线与所述悬臂的转动轴线两两垂直。
19.本发明还提供了一种水上动态高光谱测量方法,采用上述的水上动态高光谱测量仪,包括如下步骤:
20.s100、保持所述水上动态高光谱测量仪与太阳方位角度的相对关系;
21.s200、采用所述辐照度测量单元测量下降辐射,采用所述第一辐亮度测量单元测量天空辐射,采用所述第二辐亮度测量单元测量水面辐射;
22.s300、采用所述控制组件存储所述辐照度测量单元、所述第一辐亮度测量单元与所述第二辐亮度测量单元的数据;
23.其中,所述步骤s100包括如下步骤:
24.s110、通过所述gps模块获得所述水上动态高光谱测量仪的utc、纬度和经度;
25.s120、根据步骤s110中的水上动态高光谱测量仪的utc、纬度和经度,计算当前太阳的方位角;
26.s130、通过所述imu模块获得所述水上动态高光谱测量仪的运动姿态,以获得当前地磁朝向;
27.s140、根据步骤s120中所获得的当前太阳方位角以及步骤s130中所获得的当前地磁朝向,由所述驱动组件驱动所述旋转外壳相对所述稳定支架转动和摆动。
28.上述的测量方法,采用了本发明所提供的测量仪,能够便于同步测得所需的下降辐射、天空辐射和水面辐射,并能在测量的过程中,根据测量环境的变化来调整旋转外壳的角度,进而调节辐照度测量单元、第一辐亮度测量单元和第二辐亮度测量单元的采集角度,以此来保持测量仪与太阳方位角度的相对关系,从而保证测量的准确性。
29.下面结合附图和具体实施方式对本发明作进一步详细说明。
附图说明
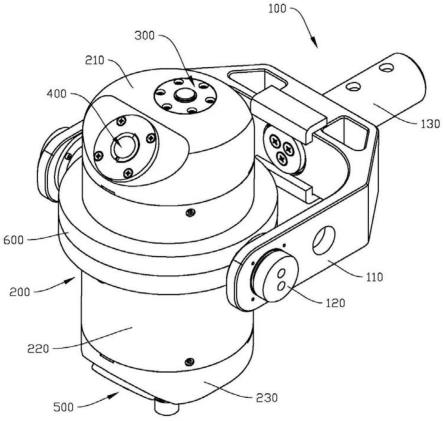
30.图1为本发明实施例一的测量仪的整体结构示意图之一;
31.图2为本发明实施例一的测量仪的测量几何示意图;
32.图3为本发明实施例一的测量仪的整体结构示意图之二;
33.图4为本发明实施例一的测量仪的俯视图;
34.图5为图4中a-a向的剖视图;
35.图6为图5中c处的局部放大图;
36.图7为图4中b-b向的剖视图。
37.附图标号说明:
38.100稳定支架、110悬臂、120转轴、130吊杆;
39.200旋转外壳、210上端盖、211第一阶梯通孔、220中间壳体、230下端盖;
40.300辐照度测量单元、310余弦校正器、320第一光电转换器、330第一安装块、340第一密封圈、350第二安装块、351第二阶梯通孔、360第一滤光片、370圆柱形石英玻璃;
41.400第一辐亮度测量单元、410第一辐亮度头、411第三阶梯通孔、420第一窗口玻璃、430第一凸透镜、440第二光电转换器、450第一卡环、460第二密封圈、470第一轴套、480第二滤光片;
42.500第二辐亮度测量单元;
43.600套环、610齿牙;
44.710驱动电机、720第一锥齿轮、730第二锥齿轮;
45.810仓内支架、820gps天线、830电路板。
具体实施方式
46.下面详细描述本发明的实施例:
47.实施例一:
48.参照图1至图7,本发明的实施例一提供了一种水上动态高光谱测量仪,包括稳定支架100、测量组件、gps模块、imu模块、驱动组件以及控制组件。
49.参照图1,测量组件包括旋转外壳200以及安装于旋转外壳200内的辐照度测量单元300、第一辐亮度测量单元400和第二辐亮度测量单元500,旋转外壳200转动并摆动连接稳定支架100。需要说明的是,这里所说的“旋转外壳200转动并摆动连接稳定支架100”,指的是旋转外壳200可以相对稳定支架100沿自身轴线转动,同时,旋转外壳200的轴线还可以相对稳定支架100摆动。具体地,如图2所示,辐照度测量单元300的信号采集方向向上,用于测量下降辐射es。第一辐亮度测量单元400的信号采集方向斜向上,用于测量天空辐射lsky。第二辐亮度测量单元500的信号采集方向斜向下,用于测量水面辐射lu。太阳天顶角θ
s与天底角θv的大小为《海洋调查规范》第5部分表观光学量水面以上测量法规定的40
°
。测量仪与太阳方位角度的相对关系,也即太阳与测量垂直面之间的方位角差φ为135
°
。由于旋转外壳200转动并摆动连接稳定支架100,当测量仪的测量环境发生变化,例如因水浪而产生抖动时,旋转外壳200能够相对稳定支架100转动和/或摆动,以维持辐照度测量单元300、第一辐亮度测量单元400和第二辐亮度测量单元500的信号采集方向,从而保持测量仪与太阳方位角度的相对关系,保证测量的准确性。
50.具体地,gps模块、imu模块、驱动组件与控制组件均设于旋转外壳200,gps模块用于提供水上动态高光谱测量仪的utc、纬度和经度;imu模块包括陀螺仪、加速度计以及地磁场传感器,用于测量水上动态高光谱测量仪的运动姿态;驱动组件用于驱动旋转外壳200、辐照度测量单元300、第一辐亮度测量单元400和第二辐亮度测量单元500;控制组件电性连接gps模块、imu模块和驱动组件,用于获取gps以及imu等数据,并控制驱动组件,以及存储数据等。具体地,如图1和图3所示,旋转外壳200包括依次连接的上端盖210、中间壳体220和下端盖230,上端盖210、中间壳体220和下端盖230均采用透波复合材料制成,以保证gps信号的接收。上端盖210与中间壳体220之间在周向采用螺丝固定连接,并在上端盖210与中间壳体220的接合处安装o型密封圈用于径向圆柱密封。同理地,下端盖230与中间壳体220在周向采用螺丝固定连接,并在下端盖230与中间壳体220的接合处安装o型密封圈用于径向圆柱密封。如图4和图5所示,旋转外壳200的内部设有电路板830、仓内支架810以及gps天线820,仓内支架810通过螺钉安装在下端盖230上,仓内支架810用于安装驱动组件以及电路板830等内部结构。gps天线820则安装于仓内支架810的最顶端位置。gps模块、imu模块、驱动组件与控制组件集成于电路板830上,电路板830上还集成有电源转换部分,用于将外部供电电压转换为后续电路板830上所需的各种电压。控制组件包括用于存储采集数据的数据接收器,可以存储辐照度测量单元300、第一辐亮度测量单元400和第二辐亮度测量单元500所采集到的电信号,也即测量仪所需的采集数据,后续分析时,可以使用这些采集数据进行计算得到所需的下降辐射、天空辐射和水面辐射。使用采集的电信号计算分析下降辐射、天空辐射和水面辐射的过程为现有技术,并非本技术所要保护的内容,在此不加以赘述。
51.由上述可知,本测量仪集成了辐照度测量单元300、第一辐亮度测量单元400和第二辐亮度测量单元500。可以同时测得所需的下降辐射、天空辐射和水面辐射,以确定目标物体的遥感反射率,提高了测量数据的同步性,以提高测量的准确性。当进行水上动态测量时,也即船载等因水浪而产生抖动的测量场合,本测量仪可以通过gps模块测量设备当前的utc、纬度和经度,并通过imu模块测量当前的地磁朝向,并将所测得的utc(协调世界时)、纬度、经度以及地磁朝向发送至控制组件,由控制组件控制驱动组件,并由驱动组件驱动旋转外壳200相对稳定支架100转动及摆动,以调节辐照度测量单元300、第一辐亮度测量单元400和第二辐亮度测量单元500的采集角度,来保持测量仪与太阳方位角度的相对关系,从而控制光谱质量,以免船舶等平台的运动带来的干扰,以提高测量结果的准确性。
52.进一步地,参照图1和图3,稳定支架100的第一端转动连接有套环600,套环600的内周沿周向分布有一圈齿牙610;驱动组件包括用于驱动旋转外壳200的第一驱动模块,第一驱动模块包括驱动电机710、第一锥齿轮720和第二锥齿轮730,驱动电机710安装于旋转外壳200内的仓内支架810上,且驱动电机710的输出端连接第一锥齿轮720,驱动电机710电
性连接控制组件,由控制组件来控制驱动电机710的启动和关闭。第一锥齿轮720与第二锥齿轮730转动连接于旋转外壳200的相对的两侧,且第一锥齿轮720与第二锥齿轮730均啮合连接套环600的齿牙610;套环600能够相对稳定支架100转动,以带动旋转外壳200相对稳定支架100摆动,驱动电机710能够驱动第一锥齿轮720转动,而第二锥齿轮730则为自由转动状态,以使旋转外壳200相对套环600和稳定支架100转动,并能使得旋转外壳200的转动较为平稳。套环600位于旋转外壳200偏上位置,使得安装了内部零部件之后的旋转外壳200的重心处于偏下位置,提高稳定性。
53.具体地,如图1和图7所示,稳定支架100包括悬臂110和转轴120,悬臂110的第一端具有u型结构,转轴120设有两组,两组转轴120分别位于u型结构内相对的两侧,且转轴120的第一端转动连接u型结构,转轴120的第二端固定连接套环600。当转轴120的第一端相对u型结构转动时,套环600相对稳定支架100转动,从而带动旋转外壳200相对稳定支架100摆动。进一步地,稳定支架100还包括连接于悬臂110的第二端的吊杆130,稳定支架100的第二端转动连接吊杆130,旋转外壳200的转动轴线、转轴120的转动轴线与悬臂110的转动轴线两两垂直。吊杆130上开设有多个连接孔,以便于将本测量仪固定到测量平台上。具体地,转轴120的第一端通过深沟球轴承连接u型结构。可以在转轴120处安装无刷电机,无刷电机与控制组件电性连接,当控制组件获得测量仪的运动姿态时,使无刷电机对旋转外壳200进行反向调节,以保持测量仪与太阳方位角度的相对关系。当然,在无需自动增稳的测量场合,也可以在深沟球轴承旁加装阻尼调节,阻尼调节的实现方式可以是通过旋钮压紧塑料垫片,通过对塑料垫片的压紧度来调节阻尼,以实现套环600的手动调节。具体地,两组转轴120的连线垂直于第一锥齿轮720与第二锥齿轮730的连线。悬臂110与吊杆130的转动连接方式,同转轴120与悬臂110的连接方式类似,在此不加以赘述。
54.由上述可知,本测量仪可以同时采样获得三个方向上的光谱,并能获得测量仪的gps、观测平面与太阳入射平面之间的夹角φ,以及测量仪器的运动姿态。测量仪器的运动姿态包括方位角、俯仰角以及横滚角,可以通过陀螺仪配合加速度计使用测得。而方位角可通过旋转外壳200的旋转来调节,俯仰角可由旋转外壳200相对悬臂110的摆动来调节,而横滚角可通过悬臂110相对吊杆130的旋转来调节。因此,本测量仪除了能够测量光谱数据之外,还可测量其它辅助数据,并能实时调节测量仪的运动姿态,以提高测量的准确性,并便于后期的数据处理分析。
55.进一步地,如图5和图6所示,辐照度测量单元300包括由外至内安装于旋转外壳200内的余弦校正器310和第一光电转换器320,第一光电转换器320能够接收来自余弦校正器310的光信号;驱动组件还包括第二驱动模块,第二驱动模块集成于电路板830上,且第二驱动模块电性连接第一光电转换器320和控制组件,第二驱动模块用于驱动第一光电转换器320。余弦校正器310用于收集180
°
立体角内的辐射,消除由于光线收集取样几何结构限制所导致的光学耦合问题,也即避免因光线反射或者旋转外壳200等固定件的遮挡而导致的测量误差。余弦校正器310的材料可以为ptfe、spectralon、乳白玻璃等具备朗伯体性质的材料。具体地,余弦校正器310的形状呈阶梯轴型,且外端的外径较小,内端的底部掏空后嵌入一圆柱形石英玻璃370,可以协调漫透射性能与透过率之间的矛盾,保证余弦校正器310的漫透射性能以及一定透过率的同时,还能保证足够的耐压强度。
56.具体地,旋转外壳200的上端开设有第一阶梯通孔211,余弦校正器310通过第一安
装块330压紧安装于第一阶梯通孔211内,第一安装块330的形状匹配余弦校正器310的形状,并采用螺丝将第一安装块330固定在第一阶梯通孔211内,实现压紧余弦校正器310。余弦校正器310的上端面凸出于第一安装块330的上端面,以增加在测量光线为低角度时的聚光面积,例如,在早上或者傍晚的时候,测量光线为低角度,此时,增加聚光面积就可以在漫射光下进行精准测量。余弦校正器310与第一阶梯通孔211之间安装有第一密封圈340,以实现防水密封。优选地,第一密封圈340安装于余弦校正器310的底部与第一阶梯通孔211的内底壁之间,采用轴向密封的方式达到防水密封效果。
57.具体地,第一光电转换器320通过第二安装块350连接于旋转外壳200内,第二安装块350开设有第二阶梯通孔351,且第二阶梯通孔351位于第一阶梯通孔211的下方。第二阶梯通孔351内安装有第一滤光片360,余弦校正器310所收集的光信号依次经过第一阶梯通孔211与第一滤光片360,并被第一光电转换器320所接收。第一滤光片360可以为长通滤光片,在测量仪使用过程中,暗值偏移会因为时间的积累、器件的老化以及不同的环境温度和气压等因素的变化而变化。用长通滤光片可以使一些像素值对外界信号不响应,紫外线在前几个像素中充分衰减,然后使用这些像素校正每个光谱的暗偏移响应,也即将这些像素值取平均值作为暗值偏移量,在测量过程中实时扣除。第一滤光片360也可以是中性滤光片,以便于调节测量光强的动态范围。当光线较强时,第一光电转换器320的输出信号饱和,也即超过了最高量程。此时,中性滤光片就能将光强衰减到量程以内。长通滤光片与中性滤光片也可以同时使用。
58.在第一安装块330与上端盖210的安装缝隙处,以及第一光电转换器320与第二安装块350的安装缝隙处,均填涂固定胶,以使得辐照度测量单元300能够与上端盖210稳定连接,即使外界环境抖动,辐照度测量单元300与上端盖210之间的相对位置也不会发生变化。辐照度测量单元300采集信号时,余弦校正器310收集光信号,光信号经过第一滤光片360,被第一光电转换器320所接收,第一光电转换器320将光以一定的角度发送至内部的光栅结构,光栅结构将入射光分离成不同波长的光,使每个波长的光以不同的衍射角聚焦/反射到高灵敏线性图像传感器,通过线性图像传感器后转换成不同波长的电信号输出,并被控制组件内的数据接收器所接收存储。在后续的研究过程中,利用存储得到的数据进行计算,就可以算出所需的辐照度。
59.进一步地,继续参照图5和图6,第一辐亮度测量单元400包括安装于旋转外壳200内的第一辐亮度头410以及由外至内安装于第一辐亮度头410内的第一窗口玻璃420、第一凸透镜430和第二光电转换器440;驱动组件还包括第三驱动模块,第三驱动模块电性连接第二光电转换器440和控制组件,第三驱动模块用于驱动第二光电转换器440。测量过程中,入射视场角主要涉及到设备不同安装高度时对目标物的观测区域,在同样的入射视场角的情况下,安装越高,观测区域越大,测量值为观测区域的一个平均,在海洋领域就能均化海浪对特定位置的影响。而观测区域过大时,又会观测到安装载体上的结构,例如船舶或者漂浮平台等。选用不同焦距的第一凸透镜430,再对应修改第一窗口玻璃420与第一凸透镜430之间的距离,以及第一凸透镜430与第二光电转换器440入光口之间的距离,即可得到不同的入射视场角,对安装高度和观测区域进行协调。
60.具体地,第一辐亮度头410开设有第三阶梯通孔411,第一窗口玻璃420通过第一卡环450安装于第三阶梯通孔411内,第一窗口玻璃420的外端具有台阶,第一卡环450从该台
阶处将第一窗口玻璃420压紧于第三阶梯通孔411内。第一卡环450采用螺丝与第一辐亮度头410连接固定,安装好第一窗口玻璃420与第一卡环450之后,第一窗口玻璃420与第一卡环450的外端平齐。第一窗口玻璃420与第三阶梯通孔411之间安装有第二密封圈460,采用轴向密封达到防水效果。第一凸透镜430安装于第三阶梯通孔411内,且第一凸透镜430与第一窗口玻璃420之间安装有第一轴套470,通过第一轴套470将第一凸透镜430固定在第三阶梯通孔411内的目标位置。具体地,第二光电转换器440安装于第一辐亮度头410的内端并位于第三阶梯通孔411的内端,且第二光电转换器440与第一凸透镜430之间安装有第二滤光片480。第二滤光片480可以是长通滤光片,以使紫外线在前几个像素中充分衰减,然后使用这些像素校正每个光谱的暗偏移响应。第二滤光片480也可以是中性滤光片,以便于调节测量光强的动态范围。在第二光电转换器440与第一辐亮度头410的安装缝隙处填涂固定胶,以使得在外界抖动的情况下,第一辐亮度头410与第二光电转换器440之间的相对位置也不会发生变动。具体地,还可以在第一窗口玻璃420与第一凸透镜430之间嵌入光阑适配器板,通过不同的孔径大小来调节入射视场角。第三阶梯通孔411的内壁还可以镀上消光层防止光线反射。第一窗口玻璃420可以采用蓝宝石或者紫外熔融石英。
61.类似的,第二辐亮度测量单元500包括安装于旋转外壳200内的第二辐亮度头以及由内至外安装于第二辐亮度头内的第二窗口玻璃、第二凸透镜和第三光电转换器;驱动组件还包括第四驱动模块,第四驱动模块电性连接第三光电转换器和控制组件,第四驱动模块用于驱动第三光电转换器。选用不同焦距的第二凸透镜,再对应修改第二窗口玻璃与第二凸透镜之间的距离,以及第二凸透镜与第三光电转换器入光口之间的距离,即可得到不同的入射视场角。具体地,第二辐亮度头开设有第四阶梯通孔,第二窗口玻璃通过第二卡环安装于第四阶梯通孔内,第二窗口玻璃的外端具有台阶,第二卡环从该台阶处将第二窗口玻璃压紧于第四阶梯通孔内。第二卡环采用螺丝与第二辐亮度头连接固定,安装好第二窗口玻璃与第二卡环之后,第二窗口玻璃与第二卡环的外端平齐。且第二窗口玻璃与第四阶梯通孔之间安装有第三密封圈,采用轴向密封达到防水效果。第二凸透镜安装于第四阶梯通孔内,且第四凸透镜与第二窗口玻璃之间安装有第二轴套。通过第二轴套将第二凸透镜固定在第四阶梯通孔内的目标位置。具体地,第三光电转换器安装于第二辐亮度头的内端并位于第四阶梯通孔的内端,且第三光电转换器与第二凸透镜之间安装有第三滤光片。第三滤光片可以是长通滤光片,以使紫外线在前几个像素中充分衰减,然后使用这些像素校正每个光谱的暗偏移响应。第三滤光片也可以是中性滤光片,以便于调节测量光强的动态范围。在第三光电转换器与第二辐亮度头的安装缝隙处填涂固定胶,以使得在外界抖动的情况下,第二辐亮度头与第三光电转换器之间的相对位置也不会发生变动。具体地,还可以在第二窗口玻璃与第二凸透镜之间嵌入光阑适配器板,通过不同的孔径大小来调节入射视场角。第四阶梯通孔的内壁还可以镀上消光层防止光纤反射。第二窗口玻璃可以采用蓝宝石或者紫外熔融石英。具体地,可以在第一光电转换器320、第二光电转换器440以及第三光电转换器上安装温度传感器,以便于校正温度漂移。
62.实施例二:
63.本发明还提供了一种水上动态高光谱测量方法,采用上述的水上动态高光谱测量仪,包括如下步骤:
64.s100、保持水上动态高光谱测量仪与太阳方位角度的相对关系;
65.s200、采用辐照度测量单元300测量下降辐射,采用第一辐亮度测量单元400测量天空辐射,采用第二辐亮度测量单元500测量水面辐射;
66.s300、采用控制组件存储辐照度测量单元300、第一辐亮度测量单元400与第二辐亮度测量单元500的数据;
67.其中,步骤s100包括如下步骤:
68.s110、通过gps模块获得水上动态高光谱测量仪的utc、纬度和经度;
69.s120、根据步骤s110中的水上动态高光谱测量仪的utc、纬度和经度,计算当前太阳的方位角;
70.s130、通过imu模块获得水上动态高光谱测量仪的运动姿态,以获得当前地磁朝向;
71.s140、根据步骤s120中所获得的当前太阳方位角以及步骤s130中所获得的当前地磁朝向,由驱动组件驱动旋转外壳200相对稳定支架100转动和摆动。
72.本实施例二中的测量方法,采用了本发明所提供的测量仪,能够便于同步测得所需的下降辐射、天空辐射和水面辐射,并能在测量的过程中,根据测量环境的变化来调整旋转外壳的角度,进而调节辐照度测量单元、第一辐亮度测量单元和第二辐亮度测量单元的采集角度,以此来保持测量仪与太阳方位角度的相对关系,从而保证测量的准确性。
73.需要注意的是,在本发明的描述中,如有涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系的,均为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造或操作,不能理解为对本发明的限制。
74.在本发明的描述中,若干的含义是一个或者多个,多个的含义是两个及两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一或第二等的,只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
75.本发明的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本发明中的具体含义。
76.上述实施方式仅为本发明的优选实施方式,不能以此来限定本发明保护的范围,本领域的技术人员在本发明的基础上所做的任何非实质性的变化及替换均属于本发明所要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1