一种机器人的路径规划方法、存储介质、系统与流程
1.本技术涉及机器人路径规划领域,具体而言,涉及一种机器人的路径规划方法、存储介质、系统。
背景技术:
2.在智能机器人领域中,路径规划问题占据着重要地位。路径规划问题指在有障碍物的环境中,在满足距离、计算时间、通信延迟和能量消耗等优化条件的前提下,寻找从机器人初始位置到期望位置的安全路径。现有的机器人路径规划方案在规划路径时,为了避免机器人之间发生碰撞,通常会在机器人的移动路径之间设置一个较大的安全距离,来避免机器人相撞,从而导致了对机器人运动场地的空间利用率偏低。因此如何保障机器人在运动时的安全性的同时,提升对机器人运动场地的空间利用率,成为了当前亟待解决的问题。
技术实现要素:
3.为了解决上述问题,本发明提出了一种机器人的路径规划方法,能保障机器人在运动时的安全性的同时,提升对机器人运动场地的空间利用率。
4.本发明提供了一种机器人的路径规划方法,其特征在于,所述方法包括:获取多个机器人的定位信息、移动任务和碰撞参数;基于所述定位信息、所述移动任务和所述碰撞参数,规划所述多个机器人在格栅地图上的多个移动路径;根据所述多个机器人的碰撞参数调整所述多个机器人的移动路径之间的路径间隔。
5.在一实施方式中,所述碰撞参数包括:机器人的车宽、机器人的碰撞距离和机器人的最大定位偏差。
6.在一实施方式中,所述根据所述多个机器人的碰撞参数调整所述多个机器人的移动路径之间的路径间隔的步骤,包括:根据所述相邻移动路径上的两个机器人的车宽获取第一距离;根据所述相邻移动路径上的两个机器人的碰撞距离获取第二距离;根据所述相邻移动路径上的两个机器人的最大定位偏差,获取第三距离;将所述第一距离、所述第二距离、所述第三距离相加,获取所述相邻移动路径上的两个机器人的最短安全距离;根据所述最短安全距离调整所述相邻移动路径之间的路径间隔。
7.在一实施方式中,所述根据所述相邻移动路径上的两个机器人的车宽获取第一距离的步骤,包括:判断所述相邻移动路径上的两个机器人的车宽是否一致;若是,则根据所述两个机器人中任一机器人的车宽获取所述第一距离;若否,则将所述两个机器人的车宽的二分之一相加,以获取所述第一距离。
8.在一实施方式中,所述根据所述相邻移动路径上的两个机器人的碰撞距离获取第二距离的步骤,包括:判断所述相邻移动路径上的两个机器人的碰撞距离是否一致;若是,则根据所述两个机器人中任一机器人的碰撞距离获取所述第二距离;若否,则将所述两个机器人的碰撞距离的二分之一相加,以获取所述第二距离。
9.在一实施方式中,所述根据所述相邻移动路径上的两个机器人的最大定位偏差,获取第三距离的步骤,包括:将所述相邻移动路径上的两个机器人的最大定位偏差相加,以获取所述第三距离。
10.在一实施方式中,所述相邻移动路径之间的路径间隔大于或等于所述最短安全距离。
11.在一实施方式中,所述基于所述定位信息、所述移动任务和所述碰撞参数,规划所述多个机器人在格栅地图上的多个移动路径的步骤,包括:根据所述碰撞参数调整所述移动路径与所述格栅地图上障碍物的距离。
12.本发明还提供一种存储介质,所述存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上述的机器人的路径规划方法的步骤。
13.本发明还提供一种机器人的路径规划系统,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其中,所述处理器执行所述计算机程序时,实现如上述的机器人的路径规划方法的步骤。
14.本发明提供的一种机器人的路径规划方法、存储介质、系统,基于多个机器人的定位信息、多个机器人的移动任务和多个机器人的碰撞参数,规划多个机器人在格栅地图上的多个移动路径,并根据多个机器人的碰撞参数调整多个机器人的移动路径之间的路径间隔,能保障机器人在运动时的安全性的同时,提升对机器人运动场地的空间利用率。
附图说明
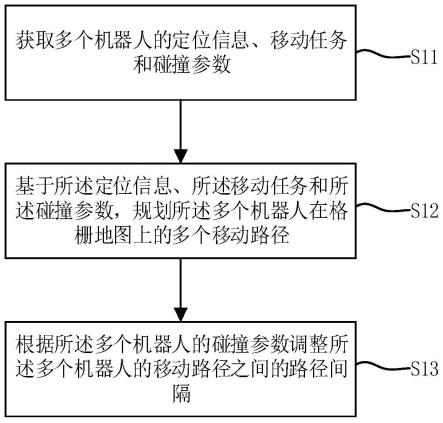
15.图1为本发明第一实施例的机器人的路径规划方法的流程图;
16.图2为本发明第一实施例的机器人的碰撞参数的示意图;
17.图3为本发明第一实施例的机器人的移动路径之间的路径间隔的示意图;
18.图4为本发明第二实施例的机器人的路径规划方法的流程图。
具体实施方式
19.有关本发明的前述及其他技术内容、特点及功效,在以下配合参考图式的较佳实施例的详细说明中将可清楚呈现。通过具体实施方式的说明,当可对本发明为达成预定目的所采取的技术手段及功效得以更加深入且具体的了解,然而所附图式仅是提供参考与说明之用,并非用来对本发明加以限制。
20.为更进一步阐述本发明为达成预定发明目的所采取的技术手段及功效,以下结合附图及较佳实施例,对本发明详细说明如下。
21.图1为本发明第一实施例的机器人的路径规划方法的流程图。
22.如图1所示,本实施例提供的机器人的路径规划方法包括以下步骤:
23.步骤s11:获取多个机器人的定位信息、移动任务和碰撞参数。
24.具体地,多个机器人的碰撞参数包括碰撞参数包括,每个机器人的车宽、每个机器人的碰撞距离和每个机器人的最大定位偏差。
25.具体地,请参考图2,如图2所示,本发明通过机器人的碰撞模型(21)与机器人的物理模型(23)之间的最短距离获取机器人的碰撞距离(25),通过机器人的运行模型(22)与机器人的物理模型(23)之间的最短距离获取机器人的最大定位偏差(27),通过机器人的运行
模型的宽度(22)获取机器人的车宽(24),通过机器人的运行模型的宽度(22)的二分之一获取机器人的二分之一车宽(26)。其中,机器人的碰撞模型(21)是根据预留的运行安全距离构建的,机器人的运行模型(22)是根据机器人可能存在的定位偏差构建的,机器人的物理模型(23)是根据机器人的真实物理尺寸构建的。
26.步骤s12:基于所述定位信息、所述移动任务和所述碰撞参数,规划所述多个机器人在格栅地图上的多个移动路径。
27.具体地,在一实施方式中,根据多个机器人的定位信息获取多个机器人路径的起点,根据多个机器人的移动任务获取多个机器人的路径目的地,利用改进蚁群算法进行规划多个机器人从路径的起点到路径目的地的移动路径,并根据机器人的碰撞参数调整机器人的移动路径与格栅地图上的障碍物的距离。
28.具体地,在一实施方式中,将机器人的碰撞距离、机器人的最大定位偏差和机器人的二分之一车宽相加,获取机器人与障碍物的最短安全距离,根据机器人与障碍物的最短安全距离调整机器人与格栅地图上的障碍物的距离。其中,机器人与格栅地图上的障碍物的距离大于或等于机器人与障碍物的最短安全距离。通常情况下,在调整机器人与障碍物的最短安全距离时,会在机器人与障碍物的最短安全距离的基础上再加上一点冗余安全距离以保障机器人在移动路径上运行时的安全。
29.步骤s13:根据所述多个机器人的碰撞参数调整所述多个机器人的移动路径之间的路径间隔。
30.具体地,请结合图2、图3参考,本发明根据相邻移动路径上的两个机器人的车宽(24)获取第一距离,根据相邻移动路径上的两个机器人的碰撞距离(25)获取第二距离,根据相邻移动路径上的两个机器人的最大定位偏差(27)获取第三距离,将第一距离、第二距离、第三距离相加,获取相邻移动路径上的两个机器人的最短安全距离,根据最短安全距离调整相邻移动路径之间的路径间隔(31)。其中,相邻移动路径之间的路径间隔(31)大于或等于最短安全距离。通常情况下,在调整相邻移动路径之间的路径间隔(31)时,会在最短安全距离的基础上再加上一点冗余安全距离以确保相邻移动路径上的机器人在相遇时,不会发生相撞。
31.本发明提供的一种机器人的路径规划方法,基于多个机器人的定位信息、多个机器人的移动任务和多个机器人的碰撞参数,规划多个机器人在格栅地图上的多个移动路径,并根据多个机器人的碰撞参数调整多个机器人的移动路径之间的路径间隔,能保障机器人在运动时的安全性的同时,提升对机器人运动场地的空间利用率。
32.图4为本发明第二实施例的机器人的路径规划方法的流程图。
33.如图4所示,本实施例提供的机器人的路径规划方法包括以下步骤:
34.步骤s41:根据所述相邻移动路径上的两个机器人的物理模型获取第一距离。
35.具体地,判断相邻移动路径上的两个机器人的车宽是否一致,在判定相邻移动路径上的两个机器人的车宽是一致时,根据两个机器人中任意一个机器人的车宽获取第一距离;在判定相邻移动路径上的两个机器人的车宽不一致时,通过将两个机器人的车宽的二分之一相加获取第一距离。
36.具体地,在一实施方式中,在判定相邻移动路径上的两个机器人的车宽不一致时,将相邻移动路径上的两个机器人的车宽进行对比获取最大值,根据最大值获取第一距离。
37.步骤s42:根据所述相邻移动路径上的两个机器人的碰撞距离获取第二距离。
38.具体地,判断相邻移动路径上的两个机器人的碰撞距离是否一致,在判定相邻移动路径上的两个机器人的碰撞距离一致时,根据两个机器人中任意一个机器人的碰撞距离获取第二距离;在判定相邻移动路径上的两个机器人的碰撞距不一致时,将两个机器人的碰撞距离的二分之一相加,获取第二距离。
39.具体地,在一实施方式中,在判定相邻移动路径上的两个机器人的碰撞距不一致时,将相邻移动路径上的两个机器人的碰撞距离进行对比获取最大值,根据最大值获取第二距离。
40.步骤s43:根据所述相邻移动路径上的两个机器人的最大定位偏差,获取第三距离。
41.具体地,将相邻移动路径上的两个机器人的最大定位偏差相加,以获取第三距离。
42.步骤s44:将所述第一距离、所述第二距离、所述第三距离相加,获取所述相邻移动路径上的两个机器人的最短安全距离。
43.步骤s45:根据所述最短安全距离调整所述相邻移动路径之间的路径间隔。
44.具体地,相邻移动路径之间的路径间隔大于或等于最短安全距离。通常情况下,在调整相邻移动路径之间的路径间隔时,会在最短安全距离的基础上再加上一点冗余安全距离以确保相邻移动路径上的机器人在相遇时,不会发生相撞。
45.本发明还提供一种存储介质,存储介质存储有计算机程序,计算机程序被处理器执行时实现如上述的机器人的路径规划方法的步骤。
46.本发明还提供一种机器人的路径规划系统,包括存储器、处理器以及存储在所述存储器中并可在处理器上运行的计算机程序,其中,处理器执行所述计算机程序时,实现如上述的机器人的路径规划方法的步骤。
47.本发明提供的一种机器人的路径规划方法、存储介质、系统,基于多个机器人的定位信息、多个机器人的移动任务和多个机器人的碰撞参数,规划多个机器人在格栅地图上的多个移动路径,并根据多个机器人的碰撞参数调整多个机器人的移动路径之间的路径间隔,能保障机器人在运动时的安全性的同时,提升对机器人运动场地的空间利用率。
48.以上,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可通过上述揭示的技术内容作出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1