三通道偏振信息采集系统
1.本发明涉及信息采集领域,具体为三通道偏振信息采集系统。
背景技术:
2.客观世界是以三维的形式存在的,在观察和认识世界的过程中,双眼和大脑将观测的画面以立体的形式呈现在我们的认知中,随着科技的发展,人类对物体进行信息采集时,已经不满足于通过传感器得到物体的二维信息,如何获取物体的三维信息成为研究的热点,其中,数字光栅投影三维测量技术是非接触式三维成像和测量技术中最具代表性的一种,因为其精度高、分辨率高、成本较低、速度快等特点,已成为应用最广泛的三维测量技术。
3.但是,传统的三维测量技术存在以下缺点:
4.(1)三维测量技术在测量表面为非漫反射物体时特别是高反光面物体,由于表面反射率不同,采集到的图像会产生局部黑暗或局部高亮区域,这些区域获得的光栅信息难以用于测量的计算,大大限制了该技术的应用范围;
5.(2)部分三维测量技术上增加偏振,例如基于镜面反射的偏振三维成像技术和基于漫反射的偏振三维成像技术,虽然可以有效的解决高反光面的测量问题,但是由于偏振片的衰减作用,黑暗区域的信噪比较低,需要结合多曝光技术才能得到较好的测量结果,限制了该技术在表面反射率变化较大时的测量精度。
技术实现要素:
6.本发明的目的在于提供三通道偏振信息采集系统,以解决上述背景技术中提出的三维测量技术在测量表面为非漫反射物体时特别是高反光面物体,由于表面反射率不同,采集到的图像会产生局部黑暗或局部高亮区域,这些区域获得的光栅信息难以用于测量的计算,大大限制了该技术的应用范围;部分三维测量技术上增加偏振,例如基于镜面反射的偏振三维成像技术和基于漫反射的偏振三维成像技术,虽然可以有效的解决高反光面的测量问题,但是由于偏振片的衰减作用,黑暗区域的信噪比较低,需要结合多曝光技术才能得到较好的测量结果,限制了该技术在表面反射率变化较大时的测量精度的问题。
7.为实现上述目的,本发明提供如下技术方案:三通道偏振信息采集系统,包括以下步骤:
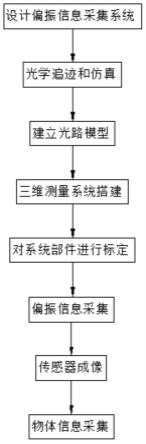
8.步骤一、设计偏振信息采集系统:三等分棱镜组、像方远心光学系统、偏振片、高感光度cmos传感器和数据采集处理电路五个部分组成偏振信息采集系统;
9.步骤二、光学追迹和仿真:采用zemax光学设计软件进行光学追迹和仿真,设计出符合需求的三等分棱镜组和像方远心系统参数;
10.步骤三、建立光路模型:建立三等分光路并通过优化结构模型参数保证三路光线聚焦位置,得到实时且共视场的三通道成像系统;
11.步骤四、三维测量系统搭建:偏振信息采集系统与工业投影仪结合;
12.步骤五、对系统部件进行标定:对三通道偏振信息采集系统光强误差标定、三通道偏振信息采集系统畸变标定、投影仪畸变标定和系统标定;
13.步骤六、偏振信息采集:分别通过三片偏振片获取三个不同方向的偏振分量进行偏振信息采集,得到共视场的三路偏振信息;
14.步骤七、传感器成像:三片偏振片配合高感光度cmos传感器进行成像;
15.步骤八、物体信息采集:将编码光栅投影在高反光物体上,根据三偏振通道的光强分布并计算出高反光物体的三维测量结果。
16.作为本发明的一种优选技术方案,所述步骤五中系统标定为相机标定和投影仪标定,所述相机标定和投影标定为使用一个带有已知特征点位置的标定板,首先,在标定板的表面通过投影仪投射一组编码图案,经过被标定板表面反射后,由相机采集并计算出编码图,通过编码图建立投影仪像素和相机像素间的一一映射,然后采集标定板图案,提取图像上的特征点位置,通过建立的关系映射到投影仪的像素上,得到了在标定板上的特征点与投影仪图像像素之间的对应关系。
17.作为本发明的一种优选技术方案,所述步骤五中三通道偏振信息采集系统光强误差标定为选择一个靶标板,在棱镜分光系统装调结束后测试每一路的光强值,并做一组标定,通过算法使每一路的光强值实现平均分配并记录平均值i,选择上述靶标板,在安装偏振片后通过采集系统获取三个偏振方向的偏振光强度信息,i0°
、i
60
°
、i
120
°
然后进行逐像元计算,(1),其中s0为未经过偏振片之间之前三路分光后的平均光强值,再通过偏振片透过率补偿后与i作比较实现偏振定标。
18.作为本发明的一种优选技术方案,所述步骤六中三片偏振片的摆放角度为0
°
、60
°
和120
°
。
19.作为本发明的一种优选技术方案,所述步骤七中高感光度cmos传感器进行成像为高感光度cmos传感器驱动和同步采集电路。
20.作为本发明的一种优选技术方案,所述步骤八中根据三偏振通道的光强分布并计算出高反光物体的三维测量结果,投射n张用于测量的光栅图像,通过三通道偏振信息采集系统,得到n
×
3张图像,其中的一幅光栅图像,采集到的三个通道的图像分别为其中k=1,2,
…
,n,由于反射后,不同物体表面对光栅的调制方式不同,因此在三个偏振通道中得到的采集结果不同,其中,一个通道内会呈现饱和状态,因此,首先要对饱和像素进行筛选,得到高光区域,其他区域由于三通道都可采集到光栅信息,计算出原始光强,得到高质量的光栅信息,进而消除了偏振片对于黑暗区域的影响,筛选出的饱和像素,在同一幅光栅图所采集的另两个通道的同一位置选择最大的非饱和像素值作为采集结果,其他光栅图也同样选择这一通道,该位置的像素值,便可计算该位置的相位值,进而得到测量结果。
21.与现有技术相比,本发明的有益效果是:
22.1、通过三通道偏振信息采集系统对被测物体进行偏振信息采集,通过求解stokes矢量可以得到原始光强,配合高感光度cmos传感器,可以在黑暗区域获得高质量的光栅图像,消除偏振片的衰减效果;
23.2、通过三个不同角度偏振片获得的偏振信息可以选择饱和像素和该像素的最佳非饱和通道,完成高亮区域的精确测量,该系统不仅能够大大提高测量的动态范围,还能够同时精确测量黑暗区域和高亮区域,在工业测量,缺陷检测,逆向工程,文物保护的领域有着巨大的应用潜力。
附图说明
24.图1为本发明的结构示意图;
25.图2为本发明偏振片摆放的示意图;
26.图3为本发明的系统光学指标表;
27.图4为本发明的同步采集示意图;
28.图5为本发明投影仪标定方法示意图;
29.图6为本发明三维测量技术示意图。
具体实施方式
30.下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
31.请参阅图1-6,本发明提供了三通道偏振信息采集系统,包括以下步骤:
32.步骤一、设计偏振信息采集系统:三等分棱镜组、像方远心光学系统、偏振片、高感光度cmos传感器和数据采集处理电路五个部分组成偏振信息采集系统;
33.步骤二、光学追迹和仿真:采用zemax光学设计软件进行光学追迹和仿真,设计出符合需求的三等分棱镜组和像方远心系统参数;
34.步骤三、建立光路模型:建立三等分光路并通过优化结构模型参数保证三路光线聚焦位置,得到实时且共视场的三通道成像系统;
35.步骤四、三维测量系统搭建:偏振信息采集系统与工业投影仪结合;
36.步骤五、对系统部件进行标定:对三通道偏振信息采集系统光强误差标定、三通道偏振信息采集系统畸变标定、投影仪畸变标定和系统标定;
37.步骤六、偏振信息采集:分别通过三片偏振片获取三个不同方向的偏振分量进行偏振信息采集,得到共视场的三路偏振信息;
38.步骤七、传感器成像:三片偏振片配合高感光度cmos传感器进行成像;
39.步骤八、物体信息采集:将编码光栅投影在高反光物体上,根据三偏振通道的光强分布并计算出高反光物体的三维测量结果。
40.步骤五中系统标定为相机标定和投影仪标定,相机标定和投影标定为使用一个带有已知特征点位置的标定板,首先,在标定板的表面通过投影仪投射一组编码图案,经过被标定板表面反射后,由相机采集并计算出编码图,通过编码图建立投影仪像素和相机像素
间的一一映射,然后采集标定板图案,提取图像上的特征点位置,通过建立的关系映射到投影仪的像素上,得到了在标定板上的特征点与投影仪图像像素之间的对应关系。
41.步骤五中三通道偏振信息采集系统光强误差标定为选择一个靶标板,在棱镜分光系统装调结束后测试每一路的光强值,并做一组标定,通过算法使每一路的光强值实现平均分配并记录平均值i,选择上述靶标板,在安装偏振片后通过采集系统获取三个偏振方向的偏振光强度信息,i0°
、i
60
°
、i
120
°
然后进行逐像元计算,其中s0为未经过偏振片之间之前三路分光后的平均光强值,再通过偏振片透过率补偿后与i作比较实现偏振定标。
42.步骤六中三片偏振片的摆放角度为0
°
、60
°
和120
°
。
43.步骤七中高感光度cmos传感器进行成像为高感光度cmos传感器驱动和同步采集电路。
44.步骤八中根据三偏振通道的光强分布并计算出高反光物体的三维测量结果,投射n张用于测量的光栅图像,通过三通道偏振信息采集系统,得到n
×
3张图像,其中的一幅光栅图像,采集到的三个通道的图像分别为栅图像,采集到的三个通道的图像分别为其中k=1,2,
…
,n,由于反射后,不同物体表面对光栅的调制方式不同,因此在三个偏振通道中得到的采集结果不同,其中,一个通道内会呈现饱和状态,因此,首先要对饱和像素进行筛选,得到高光区域,其他区域由于三通道都可采集到光栅信息,计算出原始光强,得到高质量的光栅信息,进而消除了偏振片对于黑暗区域的影响,筛选出的饱和像素,在同一幅光栅图所采集的另两个通道的同一位置选择最大的非饱和像素值作为采集结果,其他光栅图也同样选择这一通道,该位置的像素值,便可计算该位置的相位值,进而得到测量结果。
45.本发明在使用时:三等分棱镜组、像方远心光学系统、偏振片、高感光度cmos传感器和数据采集处理电路五个部分组成偏振信息采集系统,采用zemax光学设计软件进行光学追迹和仿真,设计出符合需求的三等分棱镜组和像方远心系统参数,采用zemax光学设计软件进行光学追迹和仿真,建立三等分光路并通过优化结构模型参数保证三路光线聚焦位置,得到实时且共视场的三通道成像系统,偏振信息采集系统与工业投影仪结合,组成基于光栅投影的三维测量系统,由于加工等原因,棱镜组难以实现将光能精确三等分,不可避免的存在光强误差,过三通道偏振信息采集系统可以获得共视场不同偏振分量的三副图像,通过求解stokes矢量可以得到原始光强,因此可整体看作一个相机,这样,与投影仪结合,便构造了经典的结构光三维测量系统。在该测量系统中,由于加工等原因,棱镜组难以实现将光能精确三等分,不可避免的存在光强误差,同时采集系统和工业投影仪存在镜头畸变,为保证实现高精度的测量结果,需要对整个系统进行三通道偏振信息采集系统光强误差标定、三通道偏振信息采集系统畸变标定、投影仪畸变标定和系统标定,相机标定和投影标定为使用一个带有已知特征点位置的标定板,首先,在标定板的表面通过投影仪投射一组编码图案,经过被标定板表面反射后,由相机采集并计算出编码图,通过编码图建立投影仪像
素和相机像素间的一一映射,然后采集标定板图案,提取图像上的特征点位置,通过建立的关系映射到投影仪的像素上,得到了在标定板上的特征点与投影仪图像像素之间的对应关系,系统光强误差标定为选择一个靶标板,在棱镜分光系统装调结束后测试每一路的光强值,并做一组标定,通过算法使每一路的光强值实现平均分配并记录平均值i,选择上述靶标板,在安装偏振片后通过采集系统获取三个偏振方向的偏振光强度信息,i0°
、i
60
°
、i
120
°
然后进行逐像元计算,其中s0为未经过偏振片之间之前三路分光后的平均光强值,再通过偏振片透过率补偿后与i作比较实现偏振定标,该系统由成像镜组和偏振分光系统组成,利用棱镜分光技术和镀膜技术实现可见光能量的三等分,再通过三片偏振片获取三个不同方向0
°
、60
°
、120
°
的偏振分量进行偏振信息采集,得到共视场的三路偏振信息,三片偏振片配合高感光度cmos传感器驱动和同步采集电路进行成像,将编码光栅投影在高反光物体上,根据三偏振通道的光强分布,投射n张用于测量的光栅图像,通过三通道偏振信息采集系统,得到n
×
3张图像,其中的一幅光栅图像,采集到的三个通道的图像分别为其中k=1,2,
…
,n,由于反射后,不同物体表面对光栅的调制方式不同,因此在三个偏振通道中得到的采集结果不同,其中,一个通道内会呈现饱和状态,因此,首先要对饱和像素进行筛选,得到高光区域,其他区域由于三通道都可采集到光栅信息,计算出原始光强,得到高质量的光栅信息,进而消除了偏振片对于黑暗区域的影响,筛选出的饱和像素,在同一幅光栅图所采集的另两个通道的同一位置选择最大的非饱和像素值作为采集结果,其他光栅图也同样选择这一通道,该位置的像素值,便可计算该位置的相位值,进而得到测量结果。
46.尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1