一种雷达与光电联动的智能禁渔监控系统及方法与流程
1.本发明涉及禁渔监控技术领域,尤其涉及一种雷达与光电联动的智能禁渔监控系统及方法。
背景技术:
2.实施禁渔区、禁渔期制度是国家实现渔业可持续发展的战略之举,是保护资源环境的长远之举,具有极其重要的现实意义和深远的历史意义。一是国家保护资源环境的战略措施,实施禁渔区、禁渔期制度,有利于保护繁殖亲鱼和幼鱼,恢复渔业资源。二是实现渔业可持续发展的战略措施,实施禁渔区、禁渔期制度,有利于保护、增殖长江的渔业资源,维护渔业生态环境的平衡,实现渔业可持续发展的战略措施。现代雷达技术已广泛应用于渔业,功能涉及船舶追踪、作业监管、安全救助等,光电技术利用其可视化和强大的算法支撑也得到了大范围应用,并且与雷达技术相辅相成、功能互补。但目前的技术应用还存在两个问题,一个是主要依赖人工在雷达系统和光电系统之间进行协调使用,依据雷达系统的位置信息操作光电系统以获得可视化的图像,这样做专业能力要求高、且效率低。二是在无人值守时无法实现自动化的侦察和取证,从而错过重大线索,为后续的问题追溯与证据保留造成了损失。而长江偷捕行为往往多以快速的小船舶在夜间进行,自动化的联动侦测和取证将成为打击该行为的有力武器。
技术实现要素:
3.针对现有技术中存在的问题,本发明提供一种雷达与光电联动的智能禁渔监控系统,包括:
4.雷达组件,设置于管控水域岸线,用于扫描并识别所述管控水域中的船舶,并获取识别到的所述船舶的船舶数据;
5.多台光电组件,依次沿所述管控水域岸线分布;
6.禁渔侦测模块,分别连接所述雷达组件和各所述光电组件,用于根据所述船舶数据判断对应的所述船舶为疑似偷捕船只时,根据预先获取的各所述光电组件的位置坐标和所述船舶数据处理得到各所述光电组件与所述疑似偷捕船只之间的实时距离,并根据所述实时距离动态分配与所述疑似偷捕船只距离最近且处于空闲状态的所述光电组件对所述疑似偷捕船只进行联动追踪监控,直至所述疑似偷捕船只超出所有所述光电组件的追踪范围,得到相应的监控视频作为所述管控水域的智能禁渔监控结果。
7.优选的,所述雷达组件还连接至少一个第三方气象平台,包括:
8.多个雷达设备,设置于所述管控水域岸线;
9.存储单元,用于保存预设的多个潮汐时间节点与对应的所述管控水域的地理围栏边界之间的对应关系;
10.雷达控制单元,分别连接各所述雷达设备、各所述第三方气象平台和所述存储单元,用于由各所述第三方气象平台获取所述管控水域的气象地形数据,根据所述气象地形
数据中的当前潮汐时间于所述对应关系中匹配得到相应的所述地理围栏边界,随后根据所述地理围栏边界动态调整各所述雷达设备的扫描范围,并控制各所述雷达设备在所述扫描范围内进行扫描;
11.数据处理单元,连接各所述雷达设备,用于分析各所述雷达设备的回波识别所述扫描范围内的所述船舶,并对应获取所述船舶数据。
12.优选的,所述禁渔侦测模块包括:
13.智能分析单元,用于对所述船舶数据进行智能分析得到相应的所述船舶的违法捕捞分数,在所述违法捕捞分数大于预设阈值时将对应的所述船舶标记为所述疑似偷捕船只并对应生成告警追踪信号;
14.设备分配单元,连接所述智能分析单元,用于根据所述告警追踪信号对所述船舶数据和各所述光电组件的所述位置坐标进行处理得到各所述光电组件与所述疑似偷捕船只之间的所述实时距离,随后根据所述实时距离判断所述疑似偷捕船只在至少一台所述光电组件的监控范围内时,将所述实时距离最近且处于空闲状态的所述光电组件标记为追踪设备并对应生成追踪监控信号,以及所述疑似偷捕船只在所有所述光电组件的监控范围外时,停止追踪监控;
15.偏转控制单元,连接所述设备分配单元,用于根据所述追踪监控信号获取所述船舶数据中包含的所述疑似偷捕船只的船舶经纬度和各所述光电组件的所述位置坐标包含的组件经纬度,并根据所述船舶经纬度和所述组件经纬度之间的经纬度差计算得到所述疑似偷捕船只与对应的所述追踪设备之间的横向偏转角度、纵向偏转角度,随后根据所述横向偏转角度和所述纵向偏转角度对所述疑似偷捕船只进行追踪监控。
16.优选的,所述禁渔侦测模块还连接北斗系统、船舶自动识别系统以及至少一个第三方平台,则所述智能分析单元包括:
17.第一存储子单元,用于保存预设的第一对应关系表,所述第一对应关系表中包含预设的多个船长范围,每个所述船长范围对应多个船速范围,每个所述船速范围对应多个第一评分;
18.第一评分子单元,连接所述第一存储子单元,用于根据所述船舶数据中的实时船长和实时船速于所述第一对应关系表中匹配得到相应的所述第一评分;
19.第二储存子单元,用于保存预设的第二对应关系表,所述第二对应关系表中包含预设的多个典型捕捞轨迹,每个所述典型捕捞轨迹对应一个第二评分;
20.第二评分子单元,连接所述第二储存子单元,用于将所述船舶数据中包含的轨迹与各所述典型捕捞轨迹进行相似度计算分别对应得到轨迹相似度,将所述轨迹相似度最高的所述典型捕捞轨迹于所述第二对应关系表中匹配得到相应的所述第二评分;
21.第三存储子单元,用于保存预设的第三对应关系表,所述第三对应关系表中包含预先获取的所述北斗数据和所述船舶自动识别数据中的多种船舶类型,每种船舶类型对应一个第三评分;
22.第三评分子单元,用于根据所述船舶数据中的船舶属性于所述第三对应关系表中匹配得到对应的第三评分;
23.第四存储子单元,用于保存预设的第四对应关系表,所述第四关系对应表中包含多个潮汐状态,每个潮汐状态对应一个第四评分;
24.第四评分子单元,连接所示第四存储子单元,用于实时获取气象数据,并根据所述气象数据中的潮汐状态为涨潮、平潮、落潮状态时于所述第四对应关系表中匹配得到对应的第四评分;
25.第五存储子单元,用于保存预设的第五对应关系表,所述第五对应关系表中包含预设的所述管控水域的多个地理围栏边界的经纬度范围,每个所述经纬度范围对应一个第五评分;
26.第五评分子单元,连接所述第五储存子单元,用于根据所述船舶数据中包含的所述疑似偷捕船只的船舶经纬度于所述第五对应关系表中匹配得到对应的所述第五评分;
27.总分计算子单元,分别连接所述第一评分子单元、所述第二评分子单元、所述第三评分子单元、所述第四评分子单元和所述第五评分子单元,用于将所述第一评分、所述第二评分、所述第三评分、所述第四评分、所述第五评分加权求和得到所述违法捕捞分数;
28.告警追踪子单元,连接所述总分计算子单元,用于在所述违法捕捞分数大于预设阈值时将对应的所述船舶标记为所述疑似偷捕船只并对应生成告警追踪信号。
29.优选的,各所述光电组件包括:
30.光电监控设备,用于监控追踪所述疑似偷捕船只并生成对应的所述监控视频;
31.光电云台,连接所述光电监控设备,用于根据所述横向偏转角度和所述纵向偏转角度持续实时调整所述追踪设备的监控方向,使所述疑似偷捕船只在所述监控视频的画面内保持居中。
32.优选的,所述禁渔侦测模块还包括:
33.双重识别单元,连接所述偏转控制单元,用于根据所述疑似偷捕船只的所述船舶数据和预先获取的各所述雷达组件的雷达位置坐标处理得到所述疑似偷捕船只的空间尺寸,以及根据所述光电监控设备的所述监控视频和各所述光电组件的所述位置坐标处理得到所述疑似偷捕船只的图像尺寸,根据所述空间尺寸和所述图像尺寸计算得到所述疑似偷捕船只的综合尺寸,并从所述综合尺寸中提取所述实时船长反馈至所述智能分析单元重新计算所述违法捕捞分数。
34.优选的,所述双重识别单元包括:
35.空间转换单元,用于基于所述疑似偷捕船只的所述船舶数据和预设的各所述雷达组件的位置坐标构建空间三维坐标系,获取所述空间三维坐标系下的所述疑似偷捕船只的所述空间尺寸;
36.视觉转换单元,用于根据所述光电组件的所述监控视频获取连续的多张船舶图像,将多张图像中作为背景的相同的静态图像进行剪除,获取船舶剪影,根据所述追踪设备的所述位置坐标和所述追踪设备的焦距以及所述船舶剪影构建相机三维坐标系,获取所述相机三维坐标系下的所述疑似偷捕船只剪影的所述图像尺寸;
37.综合计算单元,分别连接所述空间转换单元和视觉转换单元,用于将所述空间尺寸和所述图像尺寸加权求和,得到所述疑似偷捕船只的所述综合尺寸,并从所述综合尺寸中提取所述实时船长反馈至所述智能分析单元重新计算所述违法捕捞分数。
38.优选的,所述禁渔侦测模块还包括分级存储单元,所述分级存储单元连接所述智能分析单元,所述分级存储单元包括:
39.第六存储子单元,用于保存第六对应关系表,所述第六对应关系表包含预设的多
个告警级别,每个告警级别对应多个告警类型,每个类型对应一种评分条件;
40.告警分级子单元,连接第六存储子单元,用于根据根据所述违法捕捞分数、所述第一评分、所述第二评分、所述第三评分、所述第四评分、所述第五评分于所述第六对应关系表中匹配,并在匹配结果表示所述违法捕捞分数、所述第一评分、所述第二评分、所述第三评分、所述第四评分、所述第五评分满足相应的评分条件时输出相应的告警级别及告警类型;
41.电子证据子单元,连接所述告警分级子单元,用于获取各个光电组件生成的所述监控视频,并将同一个所述疑似偷捕船只的各所述监控视频合并,并按照所述告警级别和所述告警类型分类并储存。
42.本发明还提供一种雷达与光电联动的智能禁渔监控方法,包括:
43.步骤s1,所述智能禁渔监控系统扫描所述管控水域的船舶,得到所述船舶的船舶数据;
44.步骤s2,所述智能禁渔监控系统根据所述船舶数据判断对应的所述船舶是否为疑似偷捕船只:
45.若是,则根据预先获取的各所述光电组件的位置坐标和所述船舶数据处理得到各所述光电组件与所述疑似偷捕船只之间的实时距离,并根据所述实时距离动态分配与所述疑似偷捕船只距离最近且处于空闲状态的所述光电组件对所述疑似偷捕船只进行联动追踪监控,直至所述疑似偷捕船只超出所有所述光电组件的追踪范围,得到相应的监控视频作为所述管控水域的智能禁渔监控结果;
46.若否,则返回步骤s1。
47.优选的,所述步骤s2包括:
48.步骤s21,对所述船舶数据进行智能分析得到相应的所述船舶的违法捕捞分数,在所述违法捕捞分数大于预设阈值时将对应的所述船舶标记为所述疑似偷捕船只并对应生成告警追踪信号;
49.步骤s22,根据所述告警追踪信号对所述船舶数据和各所述光电组件的所述位置坐标进行处理得到各所述光电组件与所述疑似偷捕船只之间的所述实时距离,随后根据所述实时距离判断所述疑似偷捕船只是否在至少一台所述光电组件的监控范围内:
50.若是,则将所述实时距离最近且处于空闲状态的所述光电组件标记为追踪设备并对应生成追踪监控信号,转向步骤s23;
51.若否,则停止追踪监控,随后返回步骤s1;
52.步骤s23,根据所述追踪监控信号获取所述船舶数据中包含的所述疑似偷捕船只的船舶经纬度和各所述光电组件的所述位置坐标包含的组件经纬度,并根据所述船舶经纬度和所述组件经纬度之间的经纬度差计算得到所述疑似偷捕船只与对应的所述追踪设备之间的横向偏转角度、纵向偏转角度,随后根据所述横向偏转角度和所述纵向偏转角度对所述疑似偷捕船只进行追踪监控。
53.上述技术方案具有如下优点或有益效果:
54.1)结合气象地形数据中的潮汐时间、相应的所述地理围栏边界进行动态调整各所述雷达设备的扫描范围,从而无论涨落潮都能精准识别所述管控水域的船舶;
55.2)利用人工智能技术对光电组件监控得到的监控视频进行智能分析得到船舶的
尺寸,并同时可结合雷达组件得到的船舶数据的尺寸进一步得到所述船舶的综合尺寸,增加智能预警的准确度和高效性;
56.3)增加了光电组件自动联动追踪监控、分类储存监控视频的方式,弥补了无人值守时的管理空白,提升了多案件并发时的处置效率和处置能力。
附图说明
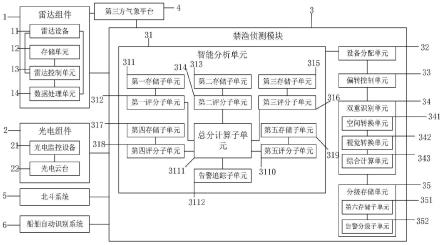
57.图1为本发明的较佳的实施例中,雷达与光电联动的智能禁渔监控系统的结构示意图;
58.图2为本发明的较佳的实施例种,雷达与光电联动的智能禁渔监控方法的流程示意图;
59.图3为本发明的较佳的实施例种,雷达与光电联动的智能禁渔监控方法的步骤s2的子流程示意图。
具体实施方式
60.下面结合附图和具体实施例对本发明进行详细说明。本发明并不限定于该实施方式,只要符合本发明的主旨,则其他实施方式也可以属于本发明的范畴。
61.本发明的较佳的实施例中,基于现有技术中存在的上述问题,现提供一种雷达与光电联动的智能禁渔监控系统,如图1所示,包括:
62.雷达组件1,设置于管控水域岸线,用于扫描并识别管控水域中的船舶,并获取识别到的船舶的船舶数据;
63.多台光电组件2,依次沿管控水域岸线分布;
64.禁渔侦测模块3,分别连接雷达组件1和各光电组件2,用于根据船舶数据判断对应的船舶为疑似偷捕船只时,根据预先获取的各光电组件2的位置坐标和船舶数据处理得到各光电组件2与疑似偷捕船只之间的实时距离,并根据实时距离动态分配与疑似偷捕船只距离最近且处于空闲状态的光电组件2对疑似偷捕船只进行联动追踪监控,直至疑似偷捕船只超出所有光电组件2的追踪范围,得到相应的监控视频作为管控水域的智能禁渔监控结果。
65.本发明的较佳实施例中,雷达组件1还连接至少一个第三方气象平台4,如图1所示,包括:
66.多个雷达设备11,设置于管控水域岸线;
67.存储单元12,用于保存预设的多个潮汐时间节点与对应的管控水域的地理围栏边界之间的对应关系;
68.雷达控制单元13,分别连接各雷达设备11、各第三方气象平台 4和存储单元12,用于由各第三方气象平台4获取管控水域的气象地形数据,根据气象地形数据中的当前潮汐时间于对应关系中匹配得到相应的地理围栏边界,随后根据地理围栏边界动态调整各雷达设备的扫描范围,并控制各雷达设备在扫描范围内进行扫描;
69.数据处理单元14,连接各雷达设备11,用于分析各雷达设备11 的回波识别扫描范围内的船舶,并对应获取船舶数据。
70.具体的,本实施例中,从第三方气象平台4获取气象地形数据,将气象地形数据中
的当前潮汐时间与对应关系中匹配得到相应的地理围栏边界以实现动态调整各雷达设备11的扫描范围,使本实施例中的禁渔监控系统实现在不同潮汐时间扫描对应范围的管控水域,提升对管控水域不同范围时的扫描的准确性。
71.本发明的较佳实施例中,如图1所示,禁渔侦测模块3包括:
72.智能分析单元31,用于对船舶数据进行智能分析得到相应的船舶的违法捕捞分数,在违法捕捞分数大于预设阈值时将对应的船舶标记为疑似偷捕船只并对应生成告警追踪信号;
73.设备分配单元32,连接智能分析单元31,用于根据告警追踪信号对船舶数据和各光电组件2的位置坐标进行处理得到各光电组件2 与疑似偷捕船只之间的实时距离,随后根据实时距离判断疑似偷捕船只在至少一台光电组件2的监控范围内时,将实时距离最近且处于空闲状态的光电组件2标记为追踪设备并对应生成追踪监控信号,以及疑似偷捕船只在所有光电组件2的监控范围外时,停止追踪监控;
74.偏转控制单元33,连接设备分配单元32,用于根据追踪监控信号获取船舶数据中包含的疑似偷捕船只的船舶经纬度和各光电组件2 的位置坐标包含的组件经纬度,并根据船舶经纬度和组件经纬度之间的经纬度差计算得到疑似偷捕船只与对应的追踪设备之间的横向偏转角度、纵向偏转角度,随后根据横向偏转角度和纵向偏转角度对疑似偷捕船只进行追踪监控。
75.具体的,本实施例中,在管控水域内扫描到一条船舶,根据雷达组件1扫描到的船舶数据进行智能分析计算得到违法捕捞分数,大于预设阈值时将对应的船舶标记为疑似偷捕船只并对应生成告警追踪信号,禁渔监控系统收到告警追踪信号后,得到禁渔监控系统中所有光电组件2能监控到的监控范围,当疑似偷捕船只在监控范围内时,动态的分配无追踪目标的,且与疑似偷捕船只距离最近的光电组件2 作为追踪设备对当前的疑似偷捕船只进行联动追踪视频监控,在追踪监控过程中根据疑似偷捕船只移动的实时位置,实时得更换无追踪目标的,且与疑似偷捕船只距离最近的光电组件2作为追踪设备进行联动追踪监控,到达最好的追踪效果;当疑似偷捕船只移动超出所以光电组件2的监控范围时,则停止对该疑似偷捕船只的联动追踪监控。
76.进一步的,在光电组件2对疑似偷捕船只的联动追踪监控过程中,还实时的计算疑似偷捕船只与对应的追踪设备之间的横向偏转角度、追踪实时距离和纵向偏转角度,其中一个光电组件2的经度为 121.655000e,纬度为31.676833n,高度为25m,该光电组件2正在监控一个经度为121.73437e和纬度为31.70485n的疑似偷捕船只,先计算得出该光电组件2和该疑似偷捕船只间的经纬度差分别为:
77.经度差e=121.655000-121.73437=-0.07937,
78.纬度差n=31.676833-31.70485=-0.028017。
79.进一步的,通过经纬度差计算出该疑似偷捕船只和该光电组件2 间的横向偏转角度φ0=arctan(n/e)=
80.arctan(-0.028017/-0.07937)=19.442
°
,以及该疑似偷捕船只和该光电组件2的追踪实时距离*110000m/度=9258.67m。
81.进一步的,根据横向偏转角度φ0和追踪实时距离l0计算得到纵向偏转角度φ1=-arctan(l1/l0)=-arctan(25/9258.67)=-0.217
°
。
82.进一步的,将以上参数(φ0=19.442
°
、φ1=-0.217
°
)发给光电组件2。
83.本发明的较佳实施例中,如图1所示,禁渔侦测模块3还连接北斗系统5、船舶自动识别系统6以及至少一个第三方平台4,则智能分析单元包括:
84.第一存储子单元311,用于保存预设的第一对应关系表,第一对应关系表中包含预设的多个船长范围,每个船长范围对应多个船速范围,每个船速范围对应多个第一评分;
85.第一评分子单元312,连接第一存储子单元311,用于根据船舶数据中的实时船长和实时船速于第一对应关系表中匹配得到相应的第一评分;
86.第二储存子单元313,用于保存预设的第二对应关系表,第二对应关系表中包含预设的多个典型捕捞轨迹,每个典型捕捞轨迹对应一个第二评分;
87.第二评分子单元314,连接第二储存子单元313,用于将船舶数据中包含的轨迹与各典型捕捞轨迹进行相似度计算分别对应得到轨迹相似度,将轨迹相似度最高的典型捕捞轨迹于第二对应关系表中匹配得到相应的第二评分;
88.第三存储子单元315,用于保存预设的第三对应关系表,第三对应关系表中包含预先获取的北斗数据和船舶自动识别数据中的多种船舶类型,每种船舶类型对应一个第三评分;
89.第三评分子单元316,用于根据船舶数据中的船舶属性于第三对应关系表中匹配得到对应的第三评分;
90.第四存储子单元317,用于保存预设的第四对应关系表,第四关系对应表中包含多个潮汐状态,每个潮汐状态对应一个第四评分;
91.第四评分子单元318,连接第四存储子单元317,用于实时获取气象数据,并根据气象数据中的潮汐状态为涨潮、平潮、落潮状态时于第四对应关系表中匹配得到对应的第四评分;
92.第五存储子单元319,用于保存预设的第五对应关系表,第五对应关系表中包含预设的管控水域的多个地理围栏边界的经纬度范围,每个经纬度范围对应一个第五评分;
93.第五评分子单元3110,连接第五储存子单元319,用于根据船舶数据中包含的疑似偷捕船只的船舶经纬度于第五对应关系表中匹配得到对应的第五评分;
94.总分计算子单元3111,分别连接第一评分子单元312、第二评分子单元314、第三评分子单元316、第四评分子单元318和第五评分子单元3110,用于将第一评分、第二评分、第三评分、第四评分、第五评分加权求和得到违法捕捞分数;
95.告警追踪子单元3112,连接总分计算子单元3111,用于在违法捕捞分数大于预设阈值时将对应的船舶标记为疑似偷捕船只并对应生成告警追踪信号。
96.具体的,本实施例中,禁渔监控扫描到一个船舶的船长为20m,速度为2节,则第一评分为5;该船舶的轨迹与快艇下网轨迹相似度最高,则第二评分为5;该船舶的船舶属性在北斗系统5和船舶自动识别系统6的船舶类型中符合三无船只,则第三评分为5;该船舶在涨潮时被扫描到,则第四评分为5;该船舶的经纬度在保护区经纬度范围内,则第五评分为5;随后对上述第一评分、第二评分、第三评分、第四评分、第五评分加权求和得到违法捕捞分数为100分,将该船舶标记为疑似偷捕船只,并发出告警追踪信号。
97.本发明的较佳实施例中,如图1所示,各光电组件2包括:
98.光电监控设备21,用于监控追踪疑似偷捕船只并生成对应的监控视频;
99.光电云台22,连接光电监控设备21,根据横向偏转角度和纵向偏转角度持续实时调整追踪设备的监控方向,使疑似偷捕船只在监控视频的画面内保持居中。
100.具体的,本实施例中,光电云台22实时接收到偏转控制单元33 发出的横向偏转角度和纵向偏转角度,光电云台22根据横向偏转角度和纵向偏转角度自动调整对应的光电监控设备21的监控方向,使疑似偷捕船只在监控视频的画面内保持居中,同时生成对应的监控视频,以实现对疑似偷捕船只的联动追踪监控,并有良好的追踪效果。
101.本发明的较佳实施例中,如图1所示,禁渔侦测模块3还包括:
102.双重识别单元34,连接偏转控制单元33,用于根据疑似偷捕船只的船舶数据和预先获取的各雷达组件1的雷达位置坐标处理得到疑似偷捕船只的空间尺寸,以及根据光电监控设备21的监控视频和各光电组件2的位置坐标处理得到疑似偷捕船只的图像尺寸,根据空间尺寸和图像尺寸计算得到疑似偷捕船只的综合尺寸,并从综合尺寸中提取实时船长反馈至智能分析单元31重新计算违法捕捞分数。
103.本发明的较佳实施例中,如图1所示,双重识别单元34包括:
104.空间转换单元341,用于基于疑似偷捕船只的船舶数据和预设的各雷达组件的位置坐标构建空间三维坐标系,获取空间三维坐标系下的疑似偷捕船只的空间尺寸;
105.视觉转换单元342,用于根据光电组件2的监控视频获取连续的多张船舶图像,将多张图像中作为背景的相同的静态图像进行剪除,获取船舶剪影,根据追踪设备的位置坐标和追踪设备的焦距以及船舶剪影构建相机三维坐标系,获取相机三维坐标系下的疑似偷捕船只剪影的图像尺寸;
106.综合计算单元343,分别连接空间转换单元341和视觉转换单元 342,用于将空间尺寸和图像尺寸加权求和,得到疑似偷捕船只的综合尺寸,并从综合尺寸中提取实时船长反馈至智能分析单元31重新计算违法捕捞分数。
107.具体的,本实施例中,对疑似偷捕船只在空间三维坐标系和图像三维坐标系中的对各对应观测角度的尺寸分别进行加权求和得到综合尺寸并从综合尺寸中提取实时船长反馈至智能分析单元31重新计算违法捕捞分数,进一步提升对疑似偷捕船只的判断的准确性。
108.本发明的较佳实施例中,如图1所示,禁渔侦测模块3还包括分级存储单元35,分级存储单元连接智能分析单元31,分级存储单元 35包括:
109.第六存储子单元351,用于保存第六对应关系表,第六对应关系表包含预设的多个告警级别,每个告警级别对应多个告警类型,每个类型对应一种评分条件;
110.告警分级子单元352,连接第六存储子单元351,用于根据根据违法捕捞分数、第一评分、第二评分、第三评分、第四评分、第五评分于第六对应关系表中匹配,并在匹配结果表示违法捕捞分数、第一评分、第二评分、第三评分、第四评分、第五评分满足相应的评分条件时输出相应的告警级别及告警类型;
111.电子证据子单元353,连接告警分级子单元352,用于获取各个光电组件2生成的监控视频,并将同一个疑似偷捕船只的各监控视频合并,并按照告警级别和告警类型分类并储存。
112.具体的,本实施例中,在多个光电组件2自动地完成对同一个疑似偷捕船只联动追踪监控后,将各光电组件2分别存储的对应的监控视频按时间先后顺序合并,按照对计算得
出该疑似偷捕船只的告警级别及告警类型,并根据疑似偷捕船只的告警级别及告警类型分类并储存,弥补了无人值守时的管理空白,按照告警级别及告警类型分类还提升了多案件并发时的处置效率和处置能力。
113.本发明的较佳的实施例中,基于现有技术中存在的上述问题,还现提供一种雷达与光电联动的智能禁渔监控方法,如图2所示,包括:
114.步骤s1,智能禁渔监控系统扫描管控水域的船舶,得到船舶的船舶数据;
115.步骤s2,智能禁渔监控系统根据船舶数据判断对应的船舶是否为疑似偷捕船只:
116.若是,则根据预先获取的各光电组件的位置坐标和船舶数据处理得到各光电组件与疑似偷捕船只之间的实时距离,并根据实时距离动态分配与疑似偷捕船只距离最近且处于空闲状态的光电组件对疑似偷捕船只进行联动追踪监控,直至疑似偷捕船只超出所有光电组件的追踪范围,得到相应的监控视频作为管控水域的智能禁渔监控结果;
117.若否,则返回步骤s1。
118.本发明的较佳实施例中,步骤s2包括:
119.步骤s21,对船舶数据进行智能分析得到相应的船舶的违法捕捞分数,在违法捕捞分数大于预设阈值时将对应的船舶标记为疑似偷捕船只并对应生成告警追踪信号;
120.步骤s22,根据告警追踪信号对船舶数据和各光电组件的位置坐标进行处理得到各光电组件与疑似偷捕船只之间的实时距离,随后根据实时距离判断疑似偷捕船只是否在至少一台光电组件的监控范围内:
121.若是,则将实时距离最近且处于空闲状态的光电组件标记为追踪设备并对应生成追踪监控信号,转向步骤s23;
122.若否,则停止追踪监控,随后返回步骤s1;
123.步骤s23,根据追踪监控信号获取船舶数据中包含的疑似偷捕船只的船舶经纬度和各光电组件的位置坐标包含的组件经纬度,并根据船舶经纬度和组件经纬度之间的经纬度差计算得到疑似偷捕船只与对应的追踪设备之间的横向偏转角度、纵向偏转角度,随后根据横向偏转角度和纵向偏转角度对疑似偷捕船只进行追踪监控。
124.以上仅为本发明较佳的实施例,并非因此限制本发明的实施方式及保护范围,对于本领域技术人员而言,应当能够意识到凡运用本说明书及图示内容所作出的等同替换和显而易见的变化所得到的方案,均应当包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1