一种基于无人机多光谱数据的水质反演方法与流程
1.本发明涉及水质监测技术领域,尤其是一种基于无人机多光谱数据的水质反演方法。
背景技术:
2.传统水质监测需要布设人工采样点,送至实验室分析,这种方法虽然具有较高的准确性,但存在比较大的局限性。局限性体现在传统水质监测需要花费较长时间,且只能获得局部点位数据信息,缺乏水体水质空间分布状况信息。遥感技术的发展,为水体检测提供了一种宽范围全空间的快速监测手段。在过去的几十年里,卫星遥感技术在全球范围的水质评价中得到广泛应用,在沿海水域、河口、湖泊、水库都被证明是有用的。已有多名学者利用sentinel-2卫星影像数据、landsat 8卫星影像数据等反演叶绿素a、悬浮物、透明度等水质指标,并且也取得了较好的结果。卫星遥感技术可以满足大面积水质监测的需要,但是由于卫星遥感影像空间分辨率较低,比较适合大面积水域遥感监测。影像十分容易受到大气云层的影响,并且获取周期较长,高分辨率的卫星遥感影像往往需要付费购买,价格高昂,因此并不十分适合于小微水域的遥感反演。
3.无人机作为一种新型搭载平台受到越来越多的关注,无人机灵活机动,操作方便、投入成本低,在天气允许的情况下可以随时对感兴趣区域进行遥感监测,掌握研究区域水质变化状况。但目前将无人机技术应用在水环境监测方面的研究比较少,需要进一步研究探索,以期为水环境监测提供新的技术手段。
技术实现要素:
4.为解决传统人工采样监测难以反映水质空间分布状况的问题,本发明的目的在于提供一种采用无人机机动灵活地进行水质监测,可以得到面状数据,成本低、监测范围广、遥感影像时间分辨率高的基于无人机多光谱数据的水质反演方法。
5.为实现上述目的,本发明采用了以下技术方案:一种基于无人机多光谱数据的水质反演方法,该方法包括下列顺序的步骤:
6.(1)在研究区域卫星影像上均匀布设多个水体采样点,确定水体采样点经纬度坐标,采集水样并进行水质目标要素分析化学化验,得到所采集水样的水质目标要素,把采集到的水质目标要素数据划分为训练集和验证集;在水体采样的同时进行无人机多光谱影像数据采集,经过影像预处理,最终得到具有地表真实反射率的无人机多光谱影像;
7.(2)利用无人机多光谱影像、研究区域12.5m数字高程水系生成结果、实地勘探结果和水体采样点布设分布图,通过arcgis软件以创建面要素的形式,勾画出研究水体的范围轮廓并依照此范围轮廓裁剪无人机多光谱影像得到研究区水体的面要素shp文件;
8.(3)将研究区水体的面要素shp文件导入arcgis软件中,提取多个水体采样点所对应的地表真实反射率;
9.(4)对水质目标要素与光谱参数vi进行皮尔逊相关性分析,获得水质目标要素的
最佳光谱参数;
10.(5)利用最佳光谱参数与训练集中的水质目标要素数据建立线性模型、指数模型、多项式模型和对数模型;
11.(6)选取光谱参数vi中重要性最大的光谱参数作为随机森林模型的输入变量,确定决策树棵数,建立光谱参数vi与水质目标参数之间的随机森林模型;
12.(7)用验证集评估线性模型、指数模型、多项式模型、对数模型、随机森林模型的精度,确定水质目标要素反演最佳模型;
13.(8)将重要性最大的光谱参数输入水质目标要素反演最佳模型中,水质目标要素反演最佳模型输出水质目标要素的浓度值。
14.在步骤(1)中,所述无人机多光谱影像数据采集是指:利用无人机搭载多光谱相机,在研究区域上空对水体采样点进行拍摄,得到影像;所述影像预处理包括辐射定标、正射校正和影像拼接。
15.在步骤(1)中,所述多光谱相机具备5个波段,分别是:红波段0.63至0.69μm,记为r1;绿波段0.525至0.605μm,记为r2;蓝波段0.45至0.51μm,记为r3;近红波段0.77至0.89μm,记为r4;红边波段0.67至0.76μm,记为r5;波段r1、r2、r3、r4、r5的光谱反射率所一一对应的水体采样点的地表真实反射率为:a1、a2、a3、a4、a5。
16.所述步骤(2)具体是指:利用arcgis软件中的水文分析模块生成研究区水体、并结合无人机影像显示及实地勘探结果,使用arcgis软件勾画并裁剪得到研究区水体的面要素。
17.所述步骤(3)具体是指:利用arcgis软件的spatial analyst工具提取分析中多值提取至点功能,提取到水体采样点的地表真实反射率a1、a2、a3、a4、a5。
18.在步骤(4)中,所述光谱参数vi是指:利用提取得到的水体采样点的地表真实反射率a1、a2、a3、a4、a5,取其中两种进行以下波段组合:ri-rj、ri+rj、ri/rj、(ri-rj)/(ri+rj),得到多个光谱参数vi,i、j的取值范围为1至5的整数,i不等于j。
19.在步骤(4)中,所述皮尔逊相关性分析是指:利用spss软件实现目标水质目标要素及光谱参数vi之间的相关性分析。
20.所述步骤(5)是指:利用spss软件的分析回归、曲线估算功能建立水质目标要素与最佳光谱参数之间的线性模型、指数模型、多项式模型和对数模型。
21.在步骤(6)中,所述选取光谱参数vi中重要性最大的光谱参数作为随机森林模型的输入变量是指:利用随机森林模型对光谱参数的重要性进行排序比较,依次去掉重要性最小的特征,将重要性最大的光谱参数作为随机森林模型的输入变量,所述重要性是指光谱参数对水质目标要素的解释程度。
22.所述步骤(7)是指:利用均方根误差rmse、决定系数r2评估模型精度,精度最高的模型即为水质目标要素反演最佳模型。
23.由上述技术方案可知,本发明的有益效果为:第一,相比于传统水质监测方式,本发明具有成本低、监测范围广的优点;第二,相比于卫星遥感监测,本发明所用的无人机遥感影像时间分辨率高,降低了影像获取与水样采集时间不同步带来的一大误差;第三,传统水体采集费事费力且只能获取点状数据,而本发明采用无人机水质监测机动灵活可以得到面状数据,对于水体污染溯源具有重要意义。
附图说明
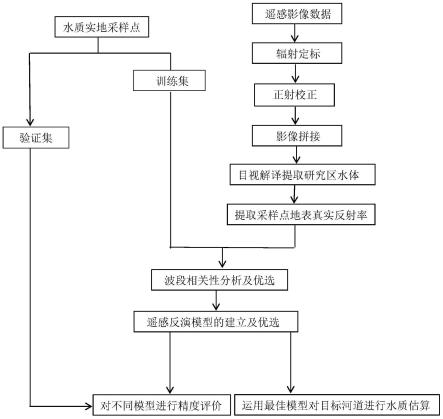
24.图1为本发明的方法流程图;
25.图2为裁剪后的研究区域水体面要素示意图;
26.图3为研究区12.5dem研究区生成水系图。
具体实施方式
27.如图1所示,一种基于无人机多光谱数据的水质反演方法,该方法包括下列顺序的步骤:
28.(1)在研究区域卫星影像上均匀布设多个水体采样点,确定水体采样点经纬度坐标,采集水样并进行水质目标要素分析化学化验,得到所采集水样的水质目标要素,把采集到的水质目标要素数据划分为训练集和验证集;在水体采样的同时进行无人机多光谱影像数据采集,经过影像预处理,最终得到具有地表真实反射率的无人机多光谱影像;
29.(2)利用无人机多光谱影像、研究区域12.5m数字高程水系生成结果、实地勘探结果和水体采样点布设分布图,通过arcgis软件以创建面要素的形式,勾画出研究水体的范围轮廓并依照此范围轮廓裁剪无人机多光谱影像得到研究区水体的面要素shp文件,如图2所示;
30.(3)将研究区水体的面要素shp文件导入arcgis软件中,提取多个水体采样点所对应的地表真实反射率;
31.(4)对水质目标要素与光谱参数vi进行皮尔逊相关性分析,获得水质目标要素的最佳光谱参数;
32.(5)利用最佳光谱参数与训练集中的水质目标要素数据建立线性模型、指数模型、多项式模型和对数模型;
33.(6)选取光谱参数vi中重要性最大的光谱参数作为随机森林模型的输入变量,确定决策树棵数,建立光谱参数vi与水质目标参数之间的随机森林模型;
34.(7)用验证集评估线性模型、指数模型、多项式模型、对数模型、随机森林模型的精度,确定水质目标要素反演最佳模型;
35.(8)将重要性最大的光谱参数输入水质目标要素反演最佳模型中,水质目标要素反演最佳模型输出水质目标要素的浓度值。
36.在步骤(1)中,所述无人机多光谱影像数据采集是指:利用无人机搭载多光谱相机,在研究区域上空对水体采样点进行拍摄,得到影像;所述影像预处理包括辐射定标、正射校正和影像拼接。辐射定标依靠拍摄三个固定反射率的定标板影像,并借助大疆智图软件完成定标板反射率的输入,从而完成多光谱5个波段影像的标定。进一步地,通过无人机飞行器记录的定位信息在软件上同名点匹配进行空三解算并校正生成正射影像。进一步地,借助大疆智图软件完成影像拼接。上述步骤完成即得到具有真实地表反射率地无人机多光谱影像。
37.在步骤(1)中,所述多光谱相机具备5个波段,分别是:红波段0.63至0.69μm,记为r1;绿波段0.525至0.605μm,记为r2;蓝波段0.45至0.51μm,记为r3;近红波段0.77至0.89μm,记为r4;红边波段0.67至0.76μm,记为r5;波段r1、r2、r3、r4、r5的光谱反射率所一一对应的水体采样点的地表真实反射率为:a1、a2、a3、a4、a5。
38.所述步骤(2)具体是指:利用arcgis软件中的水文分析模块生成研究区水体、并结合无人机影像显示及实地勘探结果,使用arcgis软件勾画并裁剪得到研究区水体的面要素。首先在https://search.asf.alaska.edu/#/官方网站下载研究区域12.5m数字高程,之后利用arcgis软件水文分析模块,依次经过填洼、流向分析、河网分析、河流分级、栅格河网矢量化、河网分级显示步骤,得到研究区域12.5m数字高程水系生成结果,如图3所示。
39.所述步骤(3)具体是指:利用arcgis软件的spatial analyst工具提取分析中多值提取至点功能,提取到水体采样点的地表真实反射率a1、a2、a3、a4、a5。
40.首先根据实地勘探结果,卫星影像显示,无人机影像显示,以及下载的研究区域12.5m数字高程利用arcgis软件中水文分析模块生成的水系结果,以创建面的形式,勾画出研究区域的范围轮廓裁剪得到研究区水体的shp文件。最后根据水体采样点经纬度坐标,利用arcgis多值提取至点功能对已经过上述预处理的无人机影像提取对应点的地表真实反射率。
41.在步骤(4)中,所述光谱参数vi是指:利用提取得到的水体采样点的地表真实反射率a1、a2、a3、a4、a5,取其中两种进行以下波段组合:ri-rj、ri+rj、ri/rj、(ri-rj)/(ri+rj),得到多个光谱参数vi,i、j的取值范围为1至5的整数,i不等于j。
42.在步骤(4)中,所述皮尔逊相关性分析是指:利用spss软件实现目标水质目标要素及光谱参数vi之间的相关性分析。
43.所述步骤(5)是指:利用spss软件的分析回归、曲线估算功能建立水质目标要素与最佳光谱参数之间的线性模型、指数模型、多项式模型和对数模型。
44.利用spss软件优选出波段组合方式中与地表真实反射率皮尔逊相关系数最大的波段组合方式。具体步骤如下:打开spss软件,导入需要分析相关性的光谱参数与水质目标要素,点击“分析—相关—双变量—导入两个变量”,相关系数勾选“皮尔逊”,显著性检验勾选“双尾”,勾选标记显著相关性。
45.优选出最大皮尔逊相关系数的波段组合进行建模,利用筛选出的敏感波段组合与水质目标要素通过统计方法分别建立线性模型、指数模型、多项式模型、对数模型。具体步骤如下:打开spss软件,导入与水质目标要素相关性最大的波段/波段组合,点击“分析—回归—曲线估算—分别输入因变量、自变量”勾选模型一列中“线性模型、指数模型、多项式模型、对数模型”,点击显示anova表,点击确定。
46.在步骤(6)中,所述选取光谱参数vi中重要性最大的光谱参数作为随机森林模型的输入变量是指:利用随机森林模型对光谱参数的重要性进行排序比较,依次去掉重要性最小的特征,将重要性最大的光谱参数作为随机森林模型的输入变量,所述重要性是指光谱参数对水质目标要素的解释程度。
47.所述步骤(7)是指:利用均方根误差rmse、决定系数r2评估模型精度,精度最高的模型即为水质目标要素反演最佳模型。
48.采用随机森林回归算法建立光谱参数与水质目标要素之间的关系,并对随机森林算法得到的各变量重要性大小进行排序,将重要性最大的光谱参数作为输入变量,将水质目标要素浓度值作为随机森林模型的响应变量。
49.在随机森林模型中,决策树的数量ntree为重抽样次数,ntree的取值主要是通过设置不同决策树的数量,得到不同误差,观察误差的变化趋势。在误差变化趋于稳定状态
下,对应的ntree数量即为最终选取的ntree值。
50.综上所述,本发明具有成本低、监测范围广的优点;本发明所用的无人机遥感影像时间分辨率高,降低了影像获取与水样采集时间不同步带来的一大误差;本发明采用无人机水质监测机动灵活可以得到面状数据,对于水体污染溯源具有重要意义。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1