基于时间指针向量的实时组网雷达系统波束驻留调度方法
1.本发明属于雷达系统资源管理领域,特别涉及组网雷达系统的自适应波束驻留调度的方法。
背景技术:
2.相较于单站式相控阵雷达,由多个雷达节点组成的分布式多功能雷达组网系统具有更优的检测、跟踪、参数估计、干扰抑制和抗衰落能力(见文献:周文辉.相控阵雷达及组网跟踪系统资源管理技术研究[d].国防科学技术大学,2004.)。为最大化分布式雷达组网系统的性能,需设计与之相配套的高效实时波束驻留调度算法。
[0003]
现有的雷达波束驻留调度算法研究主要针对单雷达系统展开。文献(卢建斌,胡卫东,郁文贤.多功能相控阵雷达实时任务调度研究[j].电子学报,2006,34(4):732-736.)针对相控阵雷达提出一种基于时间指针的波束驻留调度算法,其中综合考虑任务的截止期和工作方式优先级形成动态优先级,在各个分析时刻调度综合优先级最高的任务。文献(zhang h,xie j,zong b,et al.dynamic priority scheduling method for the air-defence phased array radar[j].iet radar sonar&navigation,2017,11(7):1140-1146.)在动态优先级的设计中考虑了目标的威胁度,以此为基础,设计了一种在线波束驻留调度算法获得了相应的实际调度序列。文献(qu z,ding z,moo p.dual-side scheduling for radar resource management[c].international radar symposium,warsaw,poland,2020:260-263.)提出了一种双边波束驻留调度算法,该算法在调度分析的时间段上设置分隔点,并在分隔点的两侧分别以截止期最早原则和起始时间距分割点最近原则调度波束驻留任务。文献(chen y,zhang q,yuan n,et.al.an adaptive isar-imaging-considered task scheduling algorithm for multi-function phased array radars[j].ieee transactions on signal processing,2015,63(19):5096
–
5110.)则设计了成像任务的优先级,并以一种启发式调度方法实现了雷达搜索、跟踪和成像任务的调度。在文献(段毅,谭贤四,曲智国,等.基于可变时间窗的相控阵雷达事件调度方法[j].现代雷达,2018,40(2):1-6.)中,可变时间窗的概念被引入,并设计了基于可变时间窗的相控阵雷达波束驻留调度算法,使得跟踪任务的实际执行时刻调整范围进一步增大,系统的调度成功率得到提升。文献(yang s,tian k,liu r.task scheduling algorithm based on value optimization for anti-missile phased array radar[j].iet radar sonar&navigation,2019,13(11):1883
–
1889.)提出了基于价值优化的波束驻留调度模型,并采用遗传算法获得了该问题的最优解,获得了对应的最优调度序列。针对超音速目标跟踪下的波束驻留调度问题,文献(meng f,tian k.phased-array radar task scheduling method for hypersonic-glide vehicles[j].ieee access,2020,8:221288-221298.)采用基于粒子群——模拟退火的算法解决了这一问题。
[0004]
不同于单站雷达下的波束驻留调度,分布式雷达组网系统下的波束驻留调度除了需要决定各个驻留任务的实际执行时刻外,还需决定各个任务与雷达节点之间的匹配关
系。文献(shaghaghi m,adve r s.task selection and scheduling in multifunction multichannel radars[c].ieee radar conference,seattle,usa,2017:0969-0974.)将用于解决多流水线调度问题的最早截止期优先算法(earliest deadline first,edf)拓展至多通道雷达下的波束驻留调度中,并且同时提出了基于分支定界法(branch&bound,b&b)的多通道雷达下的波束驻留调度方法。文献(shaghaghi m,adve r s.machine learning based cognitive radar resource management[c].ieee radar conference,oklahoma city,usa,2018:1433-1438;shaghaghi m,adve r s,ding z.multifunction cognitive radar task scheduling using monte carlo tree search and policy networks[j].iet radar sonar&navigation.,vol.12,no.12,pp.1437
–
1447,2018;xu l,zhang t.reinforcement learning based dynamic task scheduling for multifunction radar network[c],ieee radar conference,florence,italy,2020:1-5.)则分别采用机器学习、蒙特卡洛搜索树以及q学习实现了分布式系统下的波束驻留调度。文献(liu x,zhang q,luo y,et al.isar imaging task allocation for multi-target in radar network based on potential game[j].ieee sensor journal,2019,19(23):11192-11204.)采用了一种基于凸优化的波束驻留调度方法,实现了考虑成像任务的分布式系统下的波束驻留。
[0005]
上述分布式系统下的波束驻留均取得了一定成果,但仍存在以下问题:(1)上述文献中所提方法并未考虑到波束驻留调度的期望时间准则,该准则意为任务的实际执行时刻应尽可能的接近其期望执行时刻;(2)上述文献中使用启发式方法(见文献:shaghaghi m,adve r s.task selection and scheduling in multifunction multichannel radars[c].ieee radar conference,seattle,usa,2017:0969-0974.)的波束驻留调度算法虽然计算复杂度小,具有实时性,但所得调度序列性能不佳,无法满足波束驻留调度的重要性与紧迫性准则,而使用智能方法(见文献:shaghaghi m,adve r s.task selection and scheduling in multifunction multichannel radars[c].ieee radar conference,seattle,usa,2017:0969-0974;shaghaghi m,adve r s.machine learning based cognitive radar resource management[c].ieee radar conference,oklahoma city,usa,2018:1433-1438;shaghaghi m,adve r s,ding z.multifunction cognitive radar task scheduling using monte carlo tree search and policy networks[j].iet radar sonar&navigation.,vol.12,no.12,pp.1437
–
1447,2018;xu l,zhang t.reinforcement learning based dynamic task scheduling for multifunction radar network[c],ieee radar conference,florence,italy,2020:1-5;shaghaghi m,adve r s.machine learning based cognitive radar resource management[c].ieee radar conference,oklahoma city,usa,2018:1433-1438.)的调度方法则不具有实时性,无法应用于实际的波束驻留调度分析之中。
[0006]
基于上述问题,本发明提出了一种基于时间指针向量的实时组网雷达系统波束驻留调度方法。本发明通过引入时间指针向量以提高分布式雷达组网系统的时间利用率,并将在时间指针向量指示时刻具有最高综合优先级的波束驻留任务调度至时间偏移率最低的节点处,从而使得本算法可有效兼顾波束驻留调度的重要性,紧迫性以及期望执行时间准则。
技术实现要素:
[0007]
本发明提出了一种基于时间指针向量的实时组网雷达系统波束驻留调度方法,其特征为:
[0008]
假设在当前调度间隔[t0,t0+t
si
]内有n个驻留任务t=[t1,t2,...,tn]申请在m个相控阵雷达r=[r1,r2,...,rm]上调度,其中,t0为当前调度间隔的起始时刻,t
si
为调度间隔的时长,(t0+t
si
)为当前调度间隔的结束时刻。驻留任务模型为ti={w
i dt
i l
i dw
i pti},其中,wi为工作方式优先级,dti为期望执行时刻,li为时间窗,dwi为驻留时长,pti为发射功率。基于时间指针向量的实时组网雷达系统波束驻留调度方法包括如下步骤:
[0009]
步骤1:初始化每个雷达所对应的时间指针向量tp=[tp1,tp2,...,tpm]=[t0,t0,...,t0];
[0010]
步骤2:选出任务请求队列t中满足dti+li<min(tp)的任务,将它们从中删除,并将其存入任务删除队列;
[0011]
步骤3:选出任务请求队列t中满足max(tp)≥dt
i-li的所有任务,假设选出任务有x个,若x>0,按照下式计算各任务优先级swi:
[0012][0013]
其中,xdi为任务请求ti(1≤i≤x)在x个任务中按截止期从大到小排列的序号,xpi为在x个任务中按工作方式优先级从小到大排列的序号,将这x个任务按综合优先级从大到小排序,初始化itp=1并转至步骤4;若x=0,则转至步骤8;
[0014]
步骤4:取排序后的任务队列中的第itp个任务t
itp
,选出可用于调度t
itp
的雷达集合r
itp
,r
itp
中的雷达rj应满足以下要求:
[0015]
dt
i-li≤tpj≤dti+li∩tpj+dwi≤t0+t
si
,rj∈r
itp
ꢀꢀ
(2)
[0016]
步骤5:若r
itp
不为空,则转至步骤6;若r
itp
为空且itp<x,则itp=itp+1,并返回步骤4;若r
itp
为空且itp=x则转至步骤8;
[0017]
步骤6:将t
itp
调度至r
itp
中使得t
itp
时间偏移率最小的雷达j*上:
[0018][0019]
其中tp
itp
为r
itp
中雷达所对应的时间指针集合,1为同r
itp
维度相同的全1向量;
[0020]
步骤7:令t
itp
的实际执行时刻为tp
j*
,将t
itp
放入r
j*
的任务执行队列中,并把t
itp
从任务请求队列中删除,更新tpj*=tp
j*
+dw
itp
并直接转至步骤9;
[0021]
步骤8:更新min(tp)=min(tp)+δt,其中δt为时间指针最小滑动步长;
[0022]
步骤9:若t不为空且min(tp)<t0+t
si
,则返回步骤2,否则本调度间隔分析结束。
[0023]
发明原理
[0024]
雷达波束驻留调度需要遵循重要性准则、紧迫性准则与期望执行时间准则。重要性准则表明雷达系统应调度尽可能多的高工作方式优先级任务,紧迫性准则表明截止期早的任务应尽可能被优先执行,而期望执行时间准则表明各任务的实际执行时刻应尽可能的贴近期望执行时刻。根据驻留调度的这三项准则,针对每个波束驻留任务构建如下调度收益函数:
[0025]gi
(dti,ati,li,wi,t0)=g1(wi)g2(dti,li,t0)g3(dti,ati,li)
ꢀꢀ
(4)
[0026]
其中,ati为任务的实际执行时刻,g1(wi)、g2(dti,li,t0)和g3(dti,ati,li)的计算公式如下所示:
[0027]
g1(wi)=wiꢀꢀ
(5)
[0028][0029][0030]
因g1(wi)随着任务工作方式优先级的增大而增大,所以这一项体现了调度的重要性准则;g2(dti,li,t0)中c1为一正常数,因其随任务的截止期的减小而增大,所以这一项体现了调度的紧迫性准则,g3(dti,ati,li)中c2同样为一正常数,因其随任务的实际执行时刻与期望执行时刻之差|dt
i-ati|的减小而增大,所以这一项体现了任务的期望执行时间准则。假设在当前调度间隔[t0,t0+t
si
]内有n个驻留任务t=[t1,t2,...,tn]申请在m个相控阵雷达r=[r1,r2,...,rm]上调度,综合上述调度收益函数以及分布式系统调度问题中的约束条件,分布式系统波束驻留调度问题的数学模型可建立如下:
[0031][0032]
其中,代表在雷达r
p
上实际执行的任务数量,n2和n3分别为延迟任务的数量和删除任务的数量,n1为全部实际执行任务数量的总和,即为全部实际执行任务数量的总和,即n2和n3应满足第一个约束条件。第二个约束条件表示所有调度任务必须在其可执行时间范围内执行。第三个约束条件表示同一雷达上的不同驻留任务的实际执行时间不能重合。第四、第五个不等式表示延迟和删除任务应满足的条件。上述问题为一典型np难问题。
[0033]
为了使得(8)中的目标函数最大化,考虑到目标函数要求调度重要的且更加紧迫的任务,选取当前调度分析时刻综合优先级最高的任务,该综合优先级同时考虑了任务的工作方式优先级和截止期,如步骤3与步骤4所示,确定了当前调度分析的任务;进一步,目标函数还考虑了期望执行时间准则,因此,对于上述选出的任务,在所有能执行该任务的雷达集合中,选取使其时间偏移率最小的雷达节点执行该任务,如步骤6所示。综上所述,本发明在时间指针所指时刻将当前时刻具有最大综合优先级的波束申请调度驻留任务调度至
使其时间偏移率最小的雷达节点上,从而满足了波束驻留调度的三项准则,获得了满足波束驻留调度约束条件且调度增益高的实际执行任务队列。
附图说明
[0034]
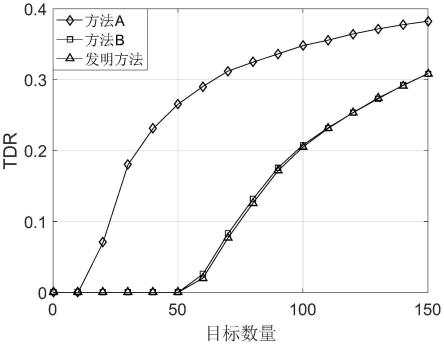
图1是三种方法的tdr对比
[0035]
图2是三种方法的hvr对比
[0036]
图3是三种方法的tur对比
[0037]
图4是三种方法的atsr对比
[0038]
图5是三种方法的运行时长对比
具体实施方式
[0039]
仿真场景中考虑存在精密跟踪、普通跟踪、地平线搜索、空域搜索和验证这五种任务,其中地平线搜索任务有三个区域需要搜索,空域搜索任务同样有三个区域需要搜索,精密跟踪目标数同普通任务目标数之比为1:4,雷达任务参数见表1。假设分布式雷达组网系统中一共存在三部相控阵雷达,每个雷达均可执行所有的驻留任务,仿真时长为12s,调度间隔时长设为50ms,δt=0.5ms。
[0040]
表1.雷达波束驻留任务参数表
[0041][0042]
为全面评估本发明性能,本节采用任务丢失率(task drop ratio,tdr)、实现价值率(hit value ratio,hvr)、时间利用率(time utilization ratio,tur)、平均时间偏移率(average time shifting ratio,atsr)和运行时长作为性能评估指标。以上指标定义如下:
[0043]
任务丢失率(tdr)为仿真时长内丢失任务数与申请调度任务数之比:
[0044]
tdr=n
drop
/n
all
ꢀꢀ
(9)
[0045]
其中,n
drop
表示丢失任务数,n
all
表示申请调度任务数;
[0046]
实现价值率(hvr)为仿真时长内实际执行任务的工作方式优先级之和与申请调度
任务的工作方式优先级之和的比:
[0047][0048]
其中,n
exe
表示实际执行任务数。该指标用于反映高优先级任务被成功调度的比重;
[0049]
时间利用率(tur):定义为实际执行任务驻留时长的总和与总仿真时长与雷达节点之积的比:
[0050][0051]
其中,t
total
为总仿真时长,m为分布式组网系统中雷达节点的总数。
[0052]
平均时间偏移率(atsr):定义为各个执行的跟踪任务时间偏移率的平均值:
[0053][0054]
其中n
tra
为实际执行跟踪任务总数。
[0055]
采用本发明提出的基于时间指针向量的实时组网雷达系统波束驻留调度方法(在仿真中被称为发明方法),并与方法a和方法b进行性能对比,其中方法a是基于最早截止期优先算法的组网雷达波束驻留调度算法(见文献:shaghaghi m,adve r s.task selection and scheduling in multifunction multichannel radars[c].ieee radar conference,seattle,usa,2017:0969-0974.),方法b是将(文献:卢建斌,胡卫东,郁文贤.多功能相控阵雷达实时任务调度研究[j].电子学报,2006,34(4):732-736.)中所提算法拓展于组网雷达波束驻留调度后的算法,该算法将具有最高综合优先级任务调度至具有最小时间指针的雷达节点上。仿真平台为matlab r2019a,计算机处理器为core i7-10700,内存为16g。图1至图5为不同指标下的100次蒙特卡罗的统计结果。
[0056]
图1为任务丢失率曲线。当目标个数为10时,方法a开始出现明显的任务丢失,这是因为最早截止期优先算法未引入时间指针,导致各驻留任务未能在时间轴上紧密排列,从而导致过早出现任务丢失。而方法b与发明方法均在调度分析时引入了时间指针,确保了任务实际执行队列中不存在时间间隙,提高了时间资源的利用率,所以其任务丢失率曲线低于方法a。
[0057]
图2为实现价值率曲线,该曲线反映工作方式优先级更高的任务是否尽可能多的被执行,该曲线与丢失率曲线趋势相反。可以看到本方法与方法b均大幅度提升了实现价值率。
[0058]
图3为时间利用率曲线。在目标个数较少时,随着目标个数增加,本发明方法时间利用率线性增加,当目标个数达到60左右时,组网系统达到饱和状态,该曲线走势趋于稳定。可以看到发明方法与方法b的时间利用率均高于方法a的时间利用率。
[0059]
图4为平均时间偏移率曲线。因发明方法在调度过程中考虑了期望时间准则,可以看到发明方法相对于其他两个方法而言具有最低的平均时间偏移率。
[0060]
图5为三种方法在一个调度间隔的平均运行时长。可以看到方法a具有最低的平均运行时长,而方法b与发明方法因在驻留调度分析中引入了时间指针,提高了算法的复杂
度,导致这两个算法的运行时间高于方法a。方法b与发明方法的运行时长几乎没有差别,这说明考虑期望时间准则几乎不会给本发明方法带来额外的计算复杂度。三种方法的平均运行时长均未超过一个调度间隔,因此三种算法均具有实时性。
[0061]
综上所述,与方法a相比,本发明提出的网雷达系统波束驻留调度方法具有更低的任务丢失率,更高的实现价值率与时间利用率;与方法b相比,本发明方法有效降低了时间偏移率;另外本发明方法具有实时性,可以应用至实际的雷达系统之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1