一种深水传感器生产用测试装置及其测试方法与流程
1.本发明涉及一种深水传感器测试装置,具体为一种深水传感器生产用测试装置及其测试方法,属于深水传感器测试装置应用技术领域。
背景技术:
2.深水传感器是水下力传感器,即在水下工作的测力传感器,由一个或多个能在受力后产生形变的弹性体,和能感应这个形变量的电阻应变片组成的电桥电路(如惠斯登电桥),以及能把电阻应变片固定粘贴在弹性体上并能传导应变量的粘合剂和保护电子电路的密封胶等三大部分组成,在水下工作时,为了应对大气压的影响,深水传感器在制作时采用多种高分子聚合物,防水胶,绝缘胶等高科技产品,根据物理的相互抵消膨胀系数,来达到消除水下压力释放和收缩的影响,找到合理的贴片组桥生产和封胶工艺,使深水传感器的内部惠斯通电桥不受干扰或者是影响最小,电缆采用海底通讯电缆系列信号线,安装使用可靠,防水密封抗压,由此来达到客户在300米以内的水压环境下使用,深水传感器能经受较高压力,在水下可以测量具有一定压力的水下或某些液体中的位移、变形、挠度等,具有广阔的应用前景,但是在深水传感器在生产后,投入使用前,需要对深水传感器的性能进行测试,因此需要一种深水传感器测试装置模拟水下环境,对深水传感器的抗压能力进行测试。
3.然而,目前的深水传感器测试装置存在着很大的缺陷,现有的测试装置在使用时,不能实现自动上下料,费时费力;当前测试装置在测试前后,深水传感器在装置内移动时,容易发生磕碰,极易导致深水传感器损坏,不能很好的保护深水传感器;现在的测试装置在进行测试前,不能使深水传感器保持固定的同时带动深水传感器转动,导致操作人员不方便将深水传感器与数据采集卡连接,速度慢,效率低。
技术实现要素:
4.针对现有技术中的问题,本发明提供了一种深水传感器生产用测试装置及其测试方法。
5.一种用于深水传感器生产用测试装置,包括转运组件、操作组件、定位组件和密封组件,操作组件安装在转运组件的一侧,定位组件和密封组件均安装在操作组件的上方,操作组件包括底台、测试舱和底板一,测试舱位于底台的上方,底板一位于测试舱的一侧,在底板一一端的上端面焊接有侧板一,在侧板一的一侧设有侧板二,在底板一的一端安装有电机二,电机二通过转轴连接有丝杆一,在侧板二的底部安装有螺孔,螺孔与丝杆一螺纹配合,在侧板一的顶部和侧板二的顶部均安装有夹板,在侧板二的顶部安装有电机三,电机三与其中一个夹板通过转轴连接;
6.其中,密封组件包括升降框、安装框和密封盖,安装框安装在升降框的内部,密封盖安装在安装框的内部,在密封盖的底部安装有橡胶圈,在升降框的下方设有连接块,在升降框的底部安装有电缸二,在电缸二的一端贯穿有伸缩杆二,伸缩杆二与连接块固定连接,
连接块位于底台的一侧。
7.优选的,在底台上端面的中部焊接有工作台,底板一焊接在工作台的上端面,在底板一的中部开设有凹槽,丝杆一安装在凹槽内部,夹板的截面呈横置的“t”型结构,在侧板一的顶部和侧板二的顶部均安装有轴承,两个夹板的底部分别转动配合在两个轴承的中部,在夹板上安装有若干个凸条。
8.优选的,在底台的上端面焊接有两个固定架,两个固定架分别与测试舱两端焊接,在测试舱的顶部安装有限位杆,限位杆的截面呈“工”字型结构,在底台靠近连接块一侧的两端均焊接有固定板二,在其中一个固定板二上安装有电机四,电机四通过转轴连接有丝杆二,在丝杆二的两侧均安装有滑杆一,丝杆二和两个滑杆一均安装在两个固定板二之间,丝杆二和两个滑杆一均贯穿连接块,在连接块的中部设置有螺孔,丝杆二与螺孔螺纹配合。
9.优选的,升降框的截面呈倒置的“l”型结构,伸缩杆二焊接在连接块的上端面,在伸缩杆二的两侧均设有滑杆三,滑杆三的底部焊接在连接块的上端面,滑杆三贯穿升降框的底部,滑杆三的截面呈“t”型结构,在升降框的底部开设有两个开孔,滑杆三在开孔内部滑动,在安装框的顶部四角均安装有升降杆,升降杆贯穿升降框的顶部,且升降杆的截面呈“t”型结构,在升降杆上安装有弹簧,弹簧位于升降框的下方。
10.优选的,转运组件包括底架、安装架一和两个传送带,底架焊接在安装架一的底部,安装架一的截面呈“日”字型结构,两个传送带均位于安装架一的内部,且在安装架一的两端内部均安装有辊筒一,辊筒一通过转轴与安装架一连接,传送带两端分别套设在安装架一两端的辊筒一上,且在安装架一的两侧均焊接有固定板一,在两个固定板一的内部均安装有电机一,电机一通过转轴连接有转杆,在转杆靠近电机一的一端贯穿有辊筒二,辊筒二的截面呈横置的“工”字型结构,两个传送带的底端分别从两个辊筒二的底部穿过。
11.优选的,定位组件包括底板二、顶板、侧架、连接架和气动夹爪一,顶板位于底板二的上方,侧架位于顶板和底板二之间,连接架位于侧架的一侧,气动夹爪一位于连接架的下方,在底台一侧的上端面安装有电机五,电机五通过转轴与底板二连接,在顶板的上方安装有电机六,电机六通过转轴连接有丝杆三,在丝杆三的两侧均安装有滑杆二,两个滑杆二和丝杆三均贯穿侧架的一侧,在侧架上设置有螺孔,螺孔与丝杆三螺纹配合。
12.优选的,在侧架远离丝杆三的一侧安装有底板三,在底板三的下方安装有滑轨,在底板三的中部开设有凹槽,在底板三的一侧安装有安装块,安装块的截面呈横置的“山”字型结构,且安装块与底板三匹配,且安装块沿底板三滑动,在底板三的一端安装有电机七,电机七通过转轴连接有丝杆四,在安装块上设置有螺孔,螺孔与丝杆四螺纹配合,在安装块的一侧焊接有安装架二,在安装架二的底部焊接有滑块,滑块与滑轨适配,滑块沿滑轨滑动,在安装架二的一侧安装有电缸一,在电缸一的一端贯穿有伸缩杆一,在伸缩杆一的底部焊接有升降架。
13.优选的,升降架呈横置的“t”型结构,在升降架的一侧安装有电机八,电机八通过转轴与连接架连接,在连接架的底部安装有电机十,电机十通过转轴与气动夹爪一连接,在气动夹爪一的底部两端均安装有抓手一,在连接架的一侧安装有电机九,电机九通过转轴连接有气动夹爪二,在气动夹爪二的底部两端均安装有抓手二,在抓手二上开设有凹槽。
14.优选的,在测试舱的一侧连接有增压泵,在测试舱内安装有压力传感器和温度传感器,在测试舱的一侧安装有plc控制器和数据采集卡。
15.优选的,用于深水传感器生产用测试装置的测试方法具体包括以下步骤:
16.步骤一:将待测试的深水传感器放置在其中一条传送带上,电机一驱动转轴带动转杆转动,转动的转杆带动辊筒二转动,转动的辊筒二配合转动的辊筒一带动传送带转动,将深水传感器传送至底台的一侧,电机五驱动转轴带动底板二转动,底板二通过滑杆二带动侧架转动,侧架通过安装块、安装架二、升降架和连接架带动气动夹爪一底部的抓手一转动,进而使抓手一转动至深水传感器上方,配合电机六驱动转轴带动丝杆三转动,转动的丝杆三与侧架上设置的螺孔螺纹配合,进而带动侧架升降,侧架通过安装块、安装架二、升降架和连接架带动气动夹爪一底部的抓手一升降,使抓手一靠近深水传感器,配合气动夹爪一驱动抓手一,抓取深水传感器,再配合电机五驱动转轴转动,改变抓手一和抓手一抓取的深水传感器的方向,使抓手一和抓手一抓取的深水传感器位于底板一的上方;
17.步骤二:电机七驱动转轴带动丝杆四转动,转动的丝杆四与安装块上设置有螺孔螺纹配合,结合安装块沿底板三滑动,滑块沿滑轨滑动,进而带动安装架二前后移动,安装架二通过升降架和连接架带动气动夹爪一底部的抓手一和抓手一抓取的深水传感器前后移动,结合电缸一控制伸缩杆一伸缩,使得升降架和连接架带动气动夹爪一底部的抓手一和抓手一抓取的深水传感器进行升降,通过带动抓手一抓取的深水传感器前后移动和升降,进而精准的调整抓手一抓取的深水传感器的高度和位置,使深水传感器位于侧板一和侧板二之间,电机二驱动转轴带动丝杆一转动,转动的丝杆一与侧板二底部安装的螺孔螺纹配合,带动侧板二左右移动,进而改变侧板一和侧板二之间的距离,从而控制两个夹板之间的距离,进而能够夹持深海传感器,使深海传感器保持固定,通过上述配合能够灵活的调整深水传感器的高度、位置和方向,进而使深水传感器能够固定在侧板一和侧板二之间,方便操作人员将连接线粘贴在深水传感器的不同位置;
18.步骤三:操作人员将连接线粘贴在深水传感器上后,在测试舱内部注水,抓手一再次抓取深水传感器,电机五驱动转轴转动,改变抓手一和抓手一抓取的深水传感器的方向,使抓手一和抓手一抓取的深水传感器位于测试舱的上方,结合电机六驱动转轴带动丝杆三转动,转动的丝杆三与侧架上设置的螺孔螺纹配合,进而带动侧架升降,侧架通过安装块、安装架二、升降架和连接架带动气动夹爪一底部的抓手一升降,使抓手一带动深水传感器靠近测试舱,进而将深水传感器放在测试舱的内部;
19.步骤四:在深水传感器放置在测试舱内后,电缸二驱动伸缩杆二伸缩,进而带动升降框升降,通过升降框带动安装框内部的密封盖靠近测试舱,进而将密封盖盖在测试舱上,使测试舱保持密封,且配合橡胶圈,能够密封测试舱和密封盖之间的缝隙,进一步避免测试舱在测试过程中泄露压力,进而使测试舱内部能够更好的模仿深水的水下压力环境;
20.步骤五:密封好测试舱后,增压泵对测试舱内部进行增压模拟水下环境,压力传感器和温度传感器能够随时监测测试舱内的压力和温度,并将数据传输给plc控制器,plc控制器对数据进行分析,从而了解测试舱内的压力和温度环境,当测试舱内的压力值达到水下三百米的压力值后,停止加压,深水传感器受到压力后,由数据采集卡测得深水传感器内部电阻的变化大小,并转换为测点的应变值,将应变值传输给plc控制器,plc控制器对数值进行分析,从而实时监测水下深水传感器的指标,进而能够测试深水传感器在水下时的变形程度,进而测试深水传感器抗压能力;
21.步骤六:完成测试后,对测试舱进行泄压,将密封盖打开,电机八通过转轴带动连
接架,进而带动连接架转动,从而带动气动夹爪一和气动夹爪二转向,进而改变抓手一和抓手二的方向,且配合电机九驱动转轴带动气动夹爪二转动,进而改变抓手二的角度,电机十驱动转轴带动气动夹爪一和抓手一转动的角度,进而使抓手一和抓手二的朝向和角度能够灵活的调整,使抓手二靠近连接线,气动夹爪二控制抓手二夹持连接线,电机九驱动转轴带动气动夹爪二转动,将连接线卷绕在抓手二的凹槽内,将深水传感器从测试舱内拉上来,将连接线从深水传感器上拆下,通过传送带将深水传感器传送出去,完成深水传感器的测试工作。
22.本发明的有益效果:
23.(1)本发明中的两个传送带分别通过两个电机一控制,使两个传送带能够单独转动,从而两个传送带不仅能够向同方向转动,进行同步上料或者同步下料,还可以使两个传送带向相反的转动,使两个传送带分别带动不同的深水传感器向不同的方向传送,进而同时实现上下料两项工作,使该测试装置能够根据深水传感器的实际需求,控制传送带的转动方向,快速传送深水传感器,加快深水传感器上下料的速度,同时操作人员无需在测试前后来回走动,以拿取、放置深水传感器,节省人力资源。
24.(2)本发明中的电机六驱动转轴带动丝杆三转动,转动的丝杆三带动侧架升降,侧架通过安装块、安装架二、升降架和连接架带动气动夹爪一底部的抓手一升降,结合电机五驱动转轴带动底板二转动,底板二通过滑杆二、侧架、安装块、安装架二、升降架和连接架带动气动夹爪一底部的抓手一转动,改变抓手一的方向,电机七驱动转轴带动丝杆四转动,转动的丝杆四带动安装架二前后移动,安装架二通过升降架和连接架带动气动夹爪一底部的抓手一前后移动,使得抓手一能够灵活的前后移动、升降和转向,进而使抓手一能够灵活的在测试舱、工作台和传送带上方移动,且能够靠近测试舱、工作台和传送带,进而抓手一抓取深水传感器后,能够带动深水穿传感器够在该测试装置内自动移动,大大提高该测试装置的自动化程度,且配合电机四驱动转轴带动丝杆二转动,转动的丝杆二带动连接块通过升降框和安装框带动密封盖左右移动,进而改变密封盖的位置,进而在抓手一抓取深水传感器在该测试装置内移动时,避免抓手一、深水传感器与密封盖发生碰撞导致该测试装置和深水传感器损坏,该测试装置工作时不但配合度更高,协作性更好,而且在该测试装置运行时能够保护深水传感器。
25.(3)本发明中的电缸一控制伸缩杆一伸缩,使得升降架和连接架带动气动夹爪一底部的抓手一升降,进而精准的调整抓手一的高度和位置,使该测试装置能够将深水传感器更加精准的放置在侧板一和侧板二之间,配合电机二驱动转轴带动丝杆一转动,转动的丝杆一带动侧板二左右移动,改变侧板一和侧板二之间的距离,进而夹持深海传感器,结合电机三驱动转轴带动夹板转动,进而在夹板夹持深海传感器的同时,带动深海传感器转动,从而方便操作人员在深海传感器的不同位置粘贴连接线,粘贴更加方便的同时,提高粘贴速度,进而提高该测试装置的效率,且通过控制两个夹板之间的距离,使两个夹板可以夹持不同大小、不同型号的深海传感器,进而扩大该测试装置的适用范围。
26.(4)本发明中的电机八通过转轴带动连接架,进而带动连接架转动,从而带动气动夹爪一和气动夹爪二转向,进而改变抓手一和抓手二的方向,且配合电机九驱动转轴带动气动夹爪二转动,进而改变抓手二的角度,电机十驱动转轴带动气动夹爪一和抓手一转动的角度,进而使抓手一和抓手二的朝向和角度能够灵活的调整,从而在抓手一抓取深水传
感器时、抓手二抓取连接线时更加方便快速。
27.(5)本发明中的转运组件能够转运深水传感器,操作组件能够固定深水传感器,定位组件能够带动深水传感器至不同的位置,且密封组件能够将操作组件中的测试舱保持密封,且该测试装置结构紧凑,从而使该测试装置测试深水传感器的流程更加顺畅。
附图说明
28.下面结合附图和实施例对本发明进一步说明。
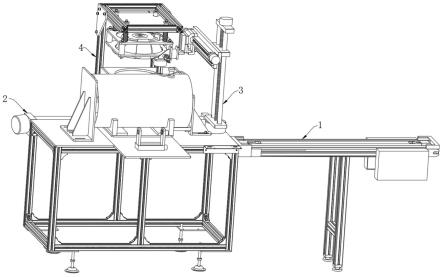
29.图1为本发明整体结构示意图。
30.图2为本发明中的转运组件结构示意图。
31.图3为本发明中的两个固定板一的正视图。
32.图4为本发明中图2中的a区域细节放大示意图。
33.图5为本发明中的操作组件和密封组件连接示意图。
34.图6为本发明中的两个固定板二的正视图。
35.图7为本发明中的底板一、侧板一和侧板二连接示意图。
36.图8为本发明中的底板一的俯视图。
37.图9为本发明中的密封组件结构示意图。
38.图10为本发明中的定位组件结构示意图。
39.图11为本发明中的连接架、气动夹爪一和气动夹爪二的位置示意图。
40.图中:1、转运组件;101、底架;102、安装架一;103、固定板一;104、辊筒一;105、传送带;106、电机一;107、转杆;108、辊筒二;2、操作组件;201、底台;202、测试舱;203、工作台;204、固定架;205、限位杆;206、底板一;207、电机二;208、丝杆一;209、侧板一;210、侧板二;211、电机三;212、夹板;213、固定板二;214、电机四;215、丝杆二;216、滑杆一;3、定位组件;301、底板二;302、顶板;303、侧架;304、安装块;305、安装架二;306、升降架;307、连接架;308、气动夹爪一;309、抓手一;310、电机五;311、电机六;312、丝杆三;313、滑杆二;314、底板三;315、电机七;316、丝杆四;317、滑轨;318、滑块;319、电缸一;320、伸缩杆一;321、电机八;322、电机九;323、气动夹爪二;324、抓手二;325、电机十;4、密封组件;401、升降框;402、安装框;403、密封盖;404、升降杆;405、弹簧;406、电缸二;407、伸缩杆二;408、连接块;409、滑杆三;410、橡胶圈。
具体实施方式
41.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
42.如图1-图11所示,一种深水传感器生产用测试装置,包括转运组件1、操作组件2、定位组件3和密封组件4,操作组件2安装在转运组件1的一侧,定位组件3和密封组件4均安装在操作组件2的上方,操作组件2包括底台201、测试舱202和底板一206,测试舱202位于底台201的上方,底板一206位于测试舱202的一侧,在底板一206一端的上端面焊接有侧板一209,在侧板一209的一侧设有侧板二210,在底板一206的一端安装有电机二207,电机二207通过转轴连接有丝杆一208,在侧板二210的底部安装有螺孔,螺孔与丝杆一208螺纹配合,在侧板一209的顶部和侧板二210的顶部均安装有夹板212,在侧板二210的顶部安装有电机
三211,电机三211与其中一个夹板212通过转轴连接,电机二207驱动转轴带动丝杆一208转动,转动的丝杆一208与侧板二210底部安装的螺孔螺纹配合,带动侧板二210左右移动,进而改变侧板一209和侧板二210之间的距离,从而控制两个夹板212之间的距离,进而能够夹持深海传感器,使深海传感器保持固定,且夹板212之间的距离可控,使得两个夹板212能够夹持不同大小、不同型号的深海传感器,使得该测试装置适用范围更广,同时,电机三211驱动转轴带动夹板212转动,进而在夹板212夹持深海传感器时,能够带动深海传感器转动,从而方便操作人员对深海传感器的不同面进行处理,使用更加方便;
43.其中,密封组件4包括升降框401、安装框402和密封盖403,安装框402安装在升降框401的内部,密封盖403安装在安装框402的内部,在密封盖403的底部安装有橡胶圈410,在升降框401的下方设有连接块408,在升降框401的底部安装有电缸二406,在电缸二406的一端贯穿有伸缩杆二407,伸缩杆二407与连接块408固定连接,连接块408位于底台201的一侧,电缸二406驱动伸缩杆二407伸缩,进而带动升降框401升降,通过升降框401带动安装框402内部的密封盖403靠近测试舱202,进而将密封盖403盖在测试舱202上,使测试舱202保持密封,且配合橡胶圈410,能够密封测试舱202和密封盖403之间的缝隙,进一步避免测试舱202在测试过程中泄露压力,进而使测试舱202内部能够更好的模仿深水的水下压力环境,进而使测试结果更加精准。
44.本发明实施例的一个可选实施方式中,在底台201上端面的中部焊接有工作台203,底板一206焊接在工作台203的上端面,在底板一206的中部开设有凹槽,丝杆一208安装在凹槽内部,夹板212的截面呈横置的“t”型结构,在侧板一209的顶部和侧板二210的顶部均安装有轴承,两个夹板212的底部分别转动配合在两个轴承的中部,在夹板212上安装有若干个凸条,能够增加夹板212与深水传感器之间的摩擦,进而避免深海传感器在夹板212之间转动时深海传感器从夹板212之间脱落导致深海传感器损毁,有助于保护深海传感器。
45.本发明实施例的一个可选实施方式中,在底台201的上端面焊接有两个固定架204,两个固定架204分别与测试舱202两端焊接,通过固定架204固定测试舱202的两端,进而使测试舱202保持固定,进而测试舱202在进行测试实验时不会晃动,进而使测试舱202内部的压力值保持稳定,从而使测试实验结果更加精准,在测试舱202的顶部安装有限位杆205,限位杆205的截面呈“工”字型结构,进而能够使限位杆205临时勾住连接线,使连接线不会紧贴测试舱202,从而方便抓手二324夹取并缠绕连接线,进而在测试结束后,方便将深水传感器取出,在底台201靠近连接块408一侧的两端均焊接有固定板二213,在其中一个固定板二213上安装有电机四214,电机四214通过转轴连接有丝杆二215,在丝杆二215的两侧均安装有滑杆一216,丝杆二215和两个滑杆一216均安装在两个固定板二213之间,丝杆二215和两个滑杆一216均贯穿连接块408,在连接块408的中部设置有螺孔,丝杆二215与螺孔螺纹配合,电机四214驱动转轴带动丝杆二215转动,转动的丝杆二215与连接块408中部设置的螺孔螺纹配合,进而使连接块408通过升降框401和安装框402带动密封盖403左右移动,进而改变密封盖403的位置,且在移动时,连接块408沿两个滑杆一216滑动,进而不仅能够固定连接块408的移动方向,而且能够使连接块408在移动时更加平稳,从而使密封盖403在挪动时不会晃动,使该测试装置在传动时更加安全、可靠,连接块408的两端均开设有开孔,开孔内部安装有若干个滚珠,若干个滚珠分别沿两个滑杆一216滚动,进而连接块408沿
滑杆一216滑动时,滚珠能够减少连接块408与滑杆一216之间的摩擦,从而降低连接块408与滑杆一216之间在传动过程中的磨损率,进而大大延长该测试装置的使用寿命。
46.本发明实施例的一个可选实施方式中,升降框401的截面呈倒置的“l”型结构,伸缩杆二407焊接在连接块408的上端面,在伸缩杆二407的两侧均设有滑杆三409,滑杆三409的底部焊接在连接块408的上端面,滑杆三409贯穿升降框401的底部,滑杆三409的截面呈“t”型结构,在升降框401的底部开设有两个开孔,滑杆三409在开孔内部滑动,进而在升降框401在升降时,两个滑杆三409能够固定升降框401的方向,使升降框401不会在升降时来回晃动,进一步稳定升降框401,且升降框401在上升至一定高度时,滑杆三409的顶部对升降框401进行遮挡,避免升降框401上升过高从滑杆三409上脱落导致该测试装置损坏的情况发生,升降框401底部开设的开孔内部安装有若干个滚珠,若干个滚珠分别沿两个滑杆三409的外表面滚动,进而在升降框401升降时,升降框401的底部沿滑杆三409滑动,滚珠能够减少升降框401与滑杆三409之间的摩擦,进而降低升降框401和滑杆三409在配合滑动时的磨损率,进而延长该测试装置的使用寿命,在安装框402的顶部四角均安装有升降杆404,升降杆404贯穿升降框401的顶部,且升降杆404的截面呈“t”型结构,在升降杆404上安装有弹簧405,弹簧405位于升降框401的下方,在升降框401带动安装框402内部的密封盖403对测试舱202进行密封时,升降杆404沿升降框401滑动,且配合弹簧405能够对密封盖403起到缓冲作用,避免密封盖403冲击测试舱202导致密封盖403和测试舱202变形的情况发生,进而有利于保护密封盖403和测试舱202,且升降杆404沿升降框401滑动能够固定密封盖403的方向,将密封盖403压进测试舱202内时,避免密封盖403黄晃动导致密封盖403歪斜造成密封不仅的情况发生,且升降框401的顶部四角均开设有开孔,开孔内部安装有若干个滚珠,若干个滚珠分别沿升降杆404的外表面滚动,进而滚珠能够减少升降杆404沿升降框401滑动时的摩擦,进而延长该测试装置的使用寿命。
47.本发明实施例的一个可选实施方式中,转运组件1包括底架101、安装架一102和两个传送带105,底架101焊接在安装架一102的底部,安装架一102的截面呈“日”字型结构,两个传送带105均位于安装架一102的内部,且在安装架一102的两端内部均安装有辊筒一104,辊筒一104通过转轴与安装架一102连接,传送带105两端分别套设在安装架一102两端的辊筒一104上,且在安装架一102的两侧均焊接有固定板一103,在两个固定板一103的内部均安装有电机一106,电机一106通过转轴连接有转杆107,在转杆107靠近电机一106的一端贯穿有辊筒二108,辊筒二108的截面呈横置的“工”字型结构,两个传送带105的底端分别从两个辊筒二108的底部穿过,电机一106驱动转轴带动转杆107转动,转动的转杆107带动辊筒二108转动,转动的辊筒二108配合转动的辊筒一104带动传送带105转动,进而两个传送带105分别通过两个电机一106控制,进而使两个传送带105分别转动,使两个传送带105不仅能够向同方向转动,通过两个传送带105同步上料或者同步下料,传送带105还可以分别向不同的方向转动,使两个传送带105分别带动不同的深水传感器上料下料,进而能够根据深水传感器的实际需求,控制传送带105的转动方向,进而快速传送深水传感器,加快深水传感器上下料的速度,进而无需操作人员来回拿取、放置深水传感器,节省人力资源。
48.本发明实施例的一个可选实施方式中,定位组件3包括底板二301、顶板302、侧架303、连接架307和气动夹爪一308,顶板302位于底板二301的上方,侧架303位于顶板302和底板二301之间,连接架307位于侧架303的一侧,气动夹爪一308位于连接架307的下方,在
底台201一侧的上端面安装有电机五310,电机五310通过转轴与底板二301连接,在顶板302的上方安装有电机六311,电机六311通过转轴连接有丝杆三312,在丝杆三312的两侧均安装有滑杆二313,两个滑杆二313和丝杆三312均贯穿侧架303的一侧,在侧架303上设置有螺孔,螺孔与丝杆三312螺纹配合,电机六311驱动转轴带动丝杆三312转动,转动的丝杆三312与侧架303上设置的螺孔螺纹配合,进而带动侧架303升降,且配合电机五310驱动转轴带动底板二301转动,底板二301通过滑杆二313带动侧架303转动,通过上述配合,使侧架303升降的同时,能够改变侧架303的方向,提高侧架303在工作时的灵活性,侧架303上设置的螺孔两侧均开设有开孔,开孔内部安装有若干个滚珠,若干个滚珠分别沿两个滑杆二313的外表面滚动,进而在侧架303升降时,滚珠能够减少滑杆二313和侧架303之间的摩擦,延长该测试装置的使用寿命。
49.本发明实施例的一个可选实施方式中,在侧架303远离丝杆三312的一侧安装有底板三314,在底板三314的下方安装有滑轨317,在底板三314的中部开设有凹槽,在底板三314的一侧安装有安装块304,安装块304的截面呈横置的“山”字型结构,且安装块304与底板三314匹配,且安装块304沿底板三314滑动,在底板三314的一端安装有电机七315,电机七315通过转轴连接有丝杆四316,在安装块304上设置有螺孔,螺孔与丝杆四316螺纹配合,在安装块304的一侧焊接有安装架二305,在安装架二305的底部焊接有滑块318,滑块318与滑轨317适配,滑块318沿滑轨317滑动,电机七315驱动转轴带动丝杆四316转动,转动的丝杆四316与安装块304上设置有螺孔螺纹配合,结合安装块304沿底板三314滑动,滑块318沿滑轨317滑动,进而带动安装架二305前后移动,提高安装架二305移动的灵活性,在安装架二305的一侧安装有电缸一319,在电缸一319的一端贯穿有伸缩杆一320,在伸缩杆一320的底部焊接有升降架306,进而前后移动的安装架二305能够通过电缸一319和伸缩杆一320带动升降架306前后移动,且配合电缸一319控制伸缩杆一320伸缩,使得升降架306上下移动,进而使升降架306能够灵活的升降和前后移动。
50.本发明实施例的一个可选实施方式中,升降架306呈横置的“t”型结构,在升降架306的一侧安装有电机八321,电机八321通过转轴与连接架307连接,在连接架307的底部安装有电机十325,电机十325通过转轴与气动夹爪一308(型号:hfz16)连接,在气动夹爪一308的底部两端均安装有抓手一309,在连接架307的一侧安装有电机九322,电机九322通过转轴连接有气动夹爪二323(型号:hfz16),在气动夹爪二323的底部两端均安装有抓手二324,在抓手二324上开设有凹槽,电机八321通过转轴带动连接架307,进而带动连接架307转动,从而带动气动夹爪一308和气动夹爪二323转向,进而改变抓手一309和抓手二324的方向,且配合电机九322驱动转轴带动气动夹爪二323转动,进而改变抓手二324的角度,电机十325驱动转轴带动气动夹爪一308和抓手一309转动的角度,进而使抓手一309和抓手二324的朝向和角度能够灵活的调整。
51.本发明实施例的一个可选实施方式中,在测试舱202的一侧连接有增压泵(型号:jrt-g17),在测试舱202内安装有压力传感器(型号:mik-p300)和温度传感器(型号:zl-th10tp),在测试舱202的一侧安装有plc控制器(型号:cp1e-e30sdr-a)和数据采集卡(型号:usb-3000),深水传感器与数据采集卡连接,并将连接线粘贴在深水传感器上,增压泵对测试舱202内部进行增压模拟水下环境,压力传感器和温度传感器能够随时监测测试舱202内的压力和温度,并将数据传输给plc控制器,plc控制器对数据进行分析,从而了解测试舱
202内的压力和温度环境,将深水传感器与数据采集卡连接,并将连接线粘贴在深水传感器上,深水传感器受到压力后,由数据采集卡测得其电阻变化大小,并转换为测点的应变值,将应变值传输给plc控制器,plc控制器对数值进行分析,从而监测深水传感器在水下的情况。
52.本发明实施例的一个可选实施方式中,用于深水传感器生产用测试装置的测试方法具体包括以下步骤:
53.步骤一:将待测试的深水传感器放置在其中一条传送带105上,电机一106驱动转轴带动转杆107转动,转动的转杆107带动辊筒二108转动,转动的辊筒二108配合转动的辊筒一104带动传送带105转动,将深水传感器传送至底台201的一侧,电机五310驱动转轴带动底板二301转动,底板二301通过滑杆二313带动侧架303转动,侧架303通过安装块304、安装架二305、升降架306和连接架307带动气动夹爪一308底部的抓手一309转动,进而使抓手一309转动至深水传感器上方,配合电机六311驱动转轴带动丝杆三312转动,转动的丝杆三312与侧架303上设置的螺孔螺纹配合,进而带动侧架303升降,侧架303通过安装块304、安装架二305、升降架306和连接架307带动气动夹爪一308底部的抓手一309升降,使抓手一309靠近深水传感器,配合气动夹爪一308驱动抓手一309,抓取深水传感器,再配合电机五310驱动转轴转动,改变抓手一309和抓手一309抓取的深水传感器的方向,使抓手一309和抓手一309抓取的深水传感器位于底板一206的上方,通过上述配合,在抓取深水传感器后,抓手一309能够灵活的升降和转向,进而实现深水传感器的自动上料,自动化程度高;
54.步骤二:电机七315驱动转轴带动丝杆四316转动,转动的丝杆四316与安装块304上设置有螺孔螺纹配合,结合安装块304沿底板三314滑动,滑块318沿滑轨317滑动,进而带动安装架二305前后移动,安装架二305通过升降架306和连接架307带动气动夹爪一308底部的抓手一309和抓手一309抓取的深水传感器前后移动,结合电缸一319控制伸缩杆一320伸缩,使得升降架306和连接架307带动气动夹爪一308底部的抓手一309和抓手一309抓取的深水传感器进行升降,通过带动抓手一309抓取的深水传感器前后移动和升降,进而精准的调整抓手一309抓取的深水传感器的高度和位置,使深水传感器位于侧板一209和侧板二210之间,电机二207驱动转轴带动丝杆一208转动,转动的丝杆一208与侧板二210底部安装的螺孔螺纹配合,带动侧板二210左右移动,进而改变侧板一209和侧板二210之间的距离,从而控制两个夹板212之间的距离,进而能够夹持深海传感器,使深海传感器保持固定,通过上述配合能够灵活的调整深水传感器的高度、位置和方向,进而使深水传感器能够固定在侧板一209和侧板二210之间,方便操作人员将连接线粘贴在深水传感器的不同位置;
55.步骤三:操作人员将连接线粘贴在深水传感器上后,在测试舱202内部注水,抓手一309再次抓取深水传感器,电机五310驱动转轴转动,改变抓手一309和抓手一309抓取的深水传感器的方向,使抓手一309和抓手一309抓取的深水传感器位于测试舱202的上方,结合电机六311驱动转轴带动丝杆三312转动,转动的丝杆三312与侧架303上设置的螺孔螺纹配合,进而带动侧架303升降,侧架303通过安装块304、安装架二305、升降架306和连接架307带动气动夹爪一308底部的抓手一309升降,使抓手一309带动深水传感器靠近测试舱202,进而将深水传感器放在测试舱202的内部,进而能够自动抓取深水传感器靠近测试舱202,进而在放置深水传感器内时,能够轻拿轻放,防止深水传感器损坏;
56.步骤四:在深水传感器放置在测试舱202内后,电缸二406驱动伸缩杆二407伸缩,
进而带动升降框401升降,通过升降框401带动安装框402内部的密封盖403靠近测试舱202,进而将密封盖403盖在测试舱202上,使测试舱202保持密封,且配合橡胶圈410,能够密封测试舱202和密封盖403之间的缝隙,进一步避免测试舱202在测试过程中泄露压力,进而使测试舱202内部能够更好的模仿深水的水下压力环境,进而使测试结果更加精准;
57.步骤五:密封好测试舱202后,增压泵对测试舱202内部进行增压模拟水下环境,压力传感器和温度传感器能够随时监测测试舱202内的压力和温度,并将数据传输给plc控制器,plc控制器对数据进行分析,从而了解测试舱202内的压力和温度环境,当测试舱202内的压力值达到水下三百米的压力值后,停止加压,深水传感器受到压力后,由数据采集卡测得深水传感器内部电阻的变化大小,并转换为测点的应变值,将应变值传输给plc控制器,plc控制器对数值进行分析,从而实时监测水下深水传感器的指标,进而能够测试深水传感器在水下时的变形程度,进而测试深水传感器抗压能力;
58.步骤六:完成测试后,对测试舱202进行泄压,将密封盖403打开,电机八321通过转轴带动连接架307,进而带动连接架307转动,从而带动气动夹爪一308和气动夹爪二323转向,进而改变抓手一309和抓手二324的方向,且配合电机九322驱动转轴带动气动夹爪二323转动,进而改变抓手二324的角度,电机十325驱动转轴带动气动夹爪一308和抓手一309转动的角度,进而使抓手一309和抓手二324的朝向和角度能够灵活的调整,使抓手二324靠近连接线,气动夹爪二323控制抓手二324夹持连接线,电机九322驱动转轴带动气动夹爪二323转动,将连接线卷绕在抓手二324的凹槽内,将深水传感器从测试舱202内拉上来,将连接线从深水传感器上拆下,通过传送带105将深水传感器传送出去,完成深水传感器的测试工作,两个传送带105分别通过两个电机一106控制,使两个传送带105能够单独转动,从而两个传送带105不仅能够向同方向转动,进行同步上料或者同步下料,还可以使两个传送带105向相反的转动,使两个传送带105分别带动不同的深水传感器向不同的方向传送,进而同时实现上下料两项工作,操作人员无需在测试前后来回走动,以拿取、放置深水传感器。
59.在使用时,首先,将待测试的深水传感器放置在其中一条传送带105上,电机一106驱动转轴带动转杆107转动,转动的转杆107带动辊筒二108转动,转动的辊筒二108配合转动的辊筒一104带动传送带105转动,将深水传感器传送至底台201的一侧,电机五310驱动转轴带动底板二301转动,底板二301通过滑杆二313带动侧架303转动,侧架303通过安装块304、安装架二305、升降架306和连接架307带动气动夹爪一308底部的抓手一309转动,进而使抓手一309转动至深水传感器上方,配合电机六311驱动转轴带动丝杆三312转动,转动的丝杆三312与侧架303上设置的螺孔螺纹配合,进而带动侧架303升降,侧架303通过安装块304、安装架二305、升降架306和连接架307带动气动夹爪一308底部的抓手一309升降,使抓手一309靠近深水传感器,配合气动夹爪一308驱动抓手一309,抓取深水传感器,再配合电机五310驱动转轴转动,改变抓手一309和抓手一309抓取的深水传感器的方向,使抓手一309和抓手一309抓取的深水传感器位于底板一206的上方,通过上述配合,在抓取深水传感器后,抓手一309能够灵活的升降和转向,进而实现深水传感器的自动上料,自动化程度高;
60.然后,电机七315驱动转轴带动丝杆四316转动,转动的丝杆四316与安装块304上设置有螺孔螺纹配合,结合安装块304沿底板三314滑动,滑块318沿滑轨317滑动,进而带动安装架二305前后移动,安装架二305通过升降架306和连接架307带动气动夹爪一308底部的抓手一309和抓手一309抓取的深水传感器前后移动,结合电缸一319控制伸缩杆一320伸
缩,使得升降架306和连接架307带动气动夹爪一308底部的抓手一309和抓手一309抓取的深水传感器进行升降,通过带动抓手一309抓取的深水传感器前后移动和升降,进而精准的调整抓手一309抓取的深水传感器的高度和位置,使深水传感器位于侧板一209和侧板二210之间,电机二207驱动转轴带动丝杆一208转动,转动的丝杆一208与侧板二210底部安装的螺孔螺纹配合,带动侧板二210左右移动,进而改变侧板一209和侧板二210之间的距离,从而控制两个夹板212之间的距离,进而能够夹持深海传感器,使深海传感器保持固定,通过上述配合能够灵活的调整深水传感器的高度、位置和方向,进而使深水传感器能够固定在侧板一209和侧板二210之间,方便操作人员将连接线粘贴在深水传感器的不同位置;
61.接着,操作人员将连接线粘贴在深水传感器上后,在测试舱202内部注水,抓手一309再次抓取深水传感器,电机五310驱动转轴转动,改变抓手一309和抓手一309抓取的深水传感器的方向,使抓手一309和抓手一309抓取的深水传感器位于测试舱202的上方,结合电机六311驱动转轴带动丝杆三312转动,转动的丝杆三312与侧架303上设置的螺孔螺纹配合,进而带动侧架303升降,侧架303通过安装块304、安装架二305、升降架306和连接架307带动气动夹爪一308底部的抓手一309升降,使抓手一309带动深水传感器靠近测试舱202,进而将深水传感器放在测试舱202的内部,进而能够自动抓取深水传感器靠近测试舱202,进而在放置深水传感器内时,能够轻拿轻放,防止深水传感器损坏;
62.接着,在深水传感器放置在测试舱202内后,电缸二406驱动伸缩杆二407伸缩,进而带动升降框401升降,通过升降框401带动安装框402内部的密封盖403靠近测试舱202,进而将密封盖403盖在测试舱202上,使测试舱202保持密封,且配合橡胶圈410,能够密封测试舱202和密封盖403之间的缝隙,进一步避免测试舱202在测试过程中泄露压力,进而使测试舱202内部能够更好的模仿深水的水下压力环境,进而使测试结果更加精准;
63.之后,密封好测试舱202后,增压泵对测试舱202内部进行增压模拟水下环境,压力传感器和温度传感器能够随时监测测试舱202内的压力和温度,并将数据传输给plc控制器,plc控制器对数据进行分析,从而了解测试舱202内的压力和温度环境,当测试舱202内的压力值达到水下三百米的压力值后,停止加压,深水传感器受到压力后,由数据采集卡测得深水传感器内部电阻的变化大小,并转换为测点的应变值,将应变值传输给plc控制器,plc控制器对数值进行分析,从而实时监测水下深水传感器的指标,进而能够测试深水传感器在水下时的变形程度,进而测试深水传感器抗压能力;
64.最后,完成测试后,对测试舱202进行泄压,将密封盖403打开,电机八321通过转轴带动连接架307,进而带动连接架307转动,从而带动气动夹爪一308和气动夹爪二323转向,进而改变抓手一309和抓手二324的方向,且配合电机九322驱动转轴带动气动夹爪二323转动,进而改变抓手二324的角度,电机十325驱动转轴带动气动夹爪一308和抓手一309转动的角度,进而使抓手一309和抓手二324的朝向和角度能够灵活的调整,使抓手二324靠近连接线,气动夹爪二323控制抓手二324夹持连接线,电机九322驱动转轴带动气动夹爪二323转动,将连接线卷绕在抓手二324的凹槽内,将深水传感器从测试舱202内拉上来,将连接线从深水传感器上拆下,通过传送带105将深水传感器传送出去,完成深水传感器的测试工作,两个传送带105分别通过两个电机一106控制,使两个传送带105能够单独转动,从而两个传送带105不仅能够向同方向转动,进行同步上料或者同步下料,还可以使两个传送带105向相反的转动,使两个传送带105分别带动不同的深水传感器向不同的方向传送,进而
同时实现上下料两项工作,操作人员无需在测试前后来回走动,以拿取、放置深水传感器。
65.以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施方式和说明书中的描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入本发明要求保护的范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1