基于平面投影的多基SAR三维表面重建方法
基于平面投影的多基sar三维表面重建方法
技术领域
1.本发明属于合成孔径雷达(sar)成像技术领域,具体涉及一种基于平面投影的多基sar三维表面重建方法。
背景技术:
2.合成孔径雷达(synthetic aperture radar,sar)是一种具有全天时、全天候、远距离等特点的高分辨微波主动成像雷达,然而传统sar二维成像技术缺少高度维的信息,无法反映目标真实的位置和结构,也不利于后续的信息获取与处理,因此高程信息的恢复是sar的核心问题之一。sar的三维重建技术能够更加真实地恢复目标场景,对城市测绘、目标精确定位和灾害评估等应用具有重大价值和意义。
3.传统的合成孔径雷达成像是基于距离多普勒的原理,目标会聚焦于零多普勒-最近斜距处,该成像原理使得sar仅仅具备二维成像的能力,对于三维空间,sar图像是场景向平面的投影,无法获得第三维的信息。为了解决此问题,现有提出的方法,例如立体测量与雷达成像技术结合,但该方法主要是基于灰度信息,没有利用图像的相位信息,而干涉测量,即通过对干涉相位即两个天线得到的图像之间存在的相位差进行估计,但在数据复杂的情况下相位解缠等过程较难处理,此外一些方法与压缩感知相结合,但对成像构型和场景的要求较高,计算处理也较为复杂。
技术实现要素:
4.为解决上述技术问题,本发明提出了一种基于平面投影的多基sar三维表面重建方法。
5.本发明采用的技术方案为:一种基于平面投影的多基sar三维表面重建方法,具体步骤如下:
6.s1、根据一发两收的多基sar构型建立回波模型并成像;
7.s2、提取相关散射点的位置信息及映射关系;
8.s3、反演恢复散射点的真实三维位置信息;
9.s4、实现三维表面重建。
10.进一步地,所述步骤s1中,具体如下:
11.s11、采用一个发射站两个接收站组成的多基sar系统,即形成一发两收的空间几何模型;
12.场景中心点位于(0,0,0),波束中心时刻发射站的位置为r
t0
=(x
t
,y
t
,z
t
),两个接收站的位置分别为r
r0(i)
=(x
ri
,y
ri
,z
ri
),i=1,2,假设发射站的速度为v
t
=(v
xt
,v
yt
,0),接收站的速度分别为v
ri
=(v
xi
,v
yi
,0),i=1,2,即发射站与接收站沿着轨迹匀速直线飞行,则在方位时刻η,发射站与第i个接收站的位置矢量分别表示为:
13.r
t
(η)=r
t0
+v
t
η
14.r
r(i)
(η)=r
r0(i)
+v
ri
η(i=1,2)
15.s12、发射站发出chrip信号,每个发射脉冲在被场景散射点rm=(xm,ym,zm)反射经各个接收站分别接收解调后,第i个接收站在方位时刻η处接收到的回波建模为:
[0016][0017]
其中,τ表示距离快时间变量,t
p
表示信号的脉冲宽度,fc表示信号的载波频率,kr表示发射线性调频信号的斜率,a0表示目标的散射系数,η表示方位时刻,c表示光速,r(i)(η)表示距离历史,即在η时刻目标到发射站位置与目标到第i个接收站位置的距离之和。
[0018]
s13、使用后向投影(back projection,bp)算法对回波处理并成像,最终可得到两幅sar图像。
[0019]
进一步地,所述步骤s2中,具体如下:
[0020]
s21、对于空间目标r
p
=(x,y,z),由步骤s1中的构型可知其距离历史r(i)(η)为发射站位置到目标的距离与目标到第i个接收站位置的距离之和,则将其表示为:
[0021][0022]
其中,r
t
(η)表示发射站位置到实际空间目标r
p
的距离,表示该目标到第i个接收站位置的距离。
[0023]
s22、对于空间目标r
p
=(x,y,z)所对应的成像处理后两幅sar图像中像素点r
fi
=(x
fi
,y
fi
,0),将其对应的距离历史r
f(i)
(η)表示为:
[0024][0025]
其中,rti'(η)表示发射站位置到实际目标成像后sar图像中目标像素点r
fi
的距离,rri'(η)表示该目标像素点到第i个接收站位置的距离。
[0026]
s23、接收目标r
p
=(x,y,z)的回波并成像处理后,仅考虑地面上的目标(高度为零),将r
p
投影至(xj,yk,0),则有:
[0027]
r(η;x,y,z)=r(η;xj,yk,0)
[0028]
其中,r(η;x,y,z)表示目标r
p
的距离历史,r(η;xj,yk,0)表示成像处理后像素点的距离历史。
[0029]
s24、目标高度非零的情况,依然满足上式,对于步骤s1中的构型,则空间目标和sar图像像素距离历史之间的关系表示为:
[0030]
r(i)(η)=r
f(i)
(η)
[0031]
进一步地,所述步骤s3中,具体如下:
[0032]
s31、由步骤s2中距离历史之间的对应关系,对其分别在方位时刻为0(η=0)处进行泰勒展开:
[0033][0034][0035]
s32、对于两幅图像中同一目标散射点,可得下列方程组:
[0036][0037]
s33、由步骤s32得到一个非线性方程组,使用牛顿迭代法或最小二乘法求解,最终能够得到未知数(x,y,z),即求得空间目标的三维位置矢量r
p
。
[0038]
进一步地,所述步骤s4中,具体如下:
[0039]
通过两幅双基地sar图像中对应散射点的位置信息,求解步骤s33中得到的非线性方程组来反求目标的真实位置,将恢复得到的散射点组合形成点云,完成初步三维表面重建。
[0040]
本发明的有益效果:本发明的方法利用散射点的距离历史,结合接收机和发射机之间的定量关系,实现三维表面的重建,首先根据一发两收的多基sar构型建立回波模型并成像,提取相关散射点的位置信息及映射关系,随后反演恢复散射点的真实三维位置信息,实现三维表面重建。本发明的方法原理较为简单,并且可以充分利用构型信息,设置特定的接收机和发射机之间的定量关系对方程进行简化,从而提高重建精度和简化运算,可以准
确地求得平面投影目标的真实三维位置,实现高度恢复以及多基sar的三维表面重建。
附图说明
[0041]
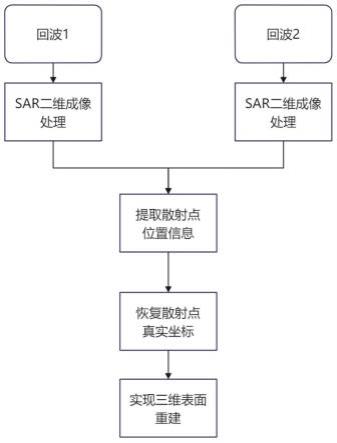
图1为本发明的一种基于平面投影的多基sar三维表面重建方法的流程图。
[0042]
图2为本发明实施例中的多基sar几何结构图。
[0043]
图3为本发明实施例中多基sar构型下得到的第一幅双基sar图像仿真结果图。
[0044]
图4为本发明实施例中多基sar构型下得到的第二幅双基sar图像仿真结果图。
[0045]
图5为本发明实施例中基于本发明方法对多基sar三维表面重建仿真结果。
具体实施方式
[0046]
下面结合附图进一步说明本发明的技术方案。
[0047]
如图1所示,本发明的一种基于平面投影的多基sar三维表面重建方法流程图,具体步骤如下:
[0048]
s1、根据一发两收的多基sar构型建立回波模型并成像;
[0049]
s2、提取相关散射点的位置信息及映射关系;
[0050]
s3、反演恢复散射点的真实三维位置信息;
[0051]
s4、实现三维表面重建。
[0052]
在本实施例中,所述步骤s1中,具体如下:
[0053]
s11、如图2所示,采用一个发射站两个接收站组成的多基sar系统,即形成一发两收的空间几何模型;
[0054]
场景中心点位于(0,0,0),波束中心时刻发射站的位置为r
t0
=(x
t
,y
t
,z
t
),两个接收站的位置分别为r
r0(i)
=(x
ri
,y
ri
,z
ri
),i=1,2,假设发射站的速度为v
t
=(v
xt
,v
yt
,0),接收站的速度分别为v
ri
=(v
xi
,v
yi
,0),i=1,2,即发射站与接收站沿着轨迹匀速直线飞行,则在方位时刻η,发射站与第i个接收站的位置矢量分别表示为:
[0055]rt
(η)=r
t0
+v
t
η
[0056]rr(i)
(η)=r
r0(i)
+v
ri
η(i=1,2)
[0057]
s12、发射站发出chrip信号,每个发射脉冲在被场景散射点rm=(xm,ym,zm)反射经各个接收站分别接收解调后,第i个接收站在方位时刻η处接收到的回波建模为:
[0058][0059]
其中,τ表示距离快时间变量,t
p
表示信号的脉冲宽度,fc表示信号的载波频率,kr表示发射线性调频信号的斜率,a0表示目标的散射系数,η表示方位时刻,c表示光速,r(i)(η)表示距离历史,即在η时刻目标到发射站位置与目标到第i个接收站位置的距离之和。
[0060]
s13、如图3,图4所示,使用后向投影(back projection,bp)算法对回波处理并成像,最终可得到两幅sar图像。
[0061]
在本实施例中,所述步骤s2中,具体如下:
[0062]
s21、对于空间目标r
p
=(x,y,z),由步骤s1中的构型可知其距离历史r(i)(η)为发射站位置到目标的距离与目标到第i个接收站位置的距离之和,则将其表示为:
[0063][0064]
其中,r
t
(η)表示发射站位置到实际空间目标r
p
的距离,表示该目标到第i个接收站位置的距离。
[0065]
s22、对于空间目标r
p
=(x,y,z)所对应的成像处理后两幅sar图像中像素点r
fi
=(x
fi
,y
fi
,0),将其对应的距离历史r
f(i)
(η)表示为:
[0066][0067]
其中,rti'(η)表示发射站位置到实际目标成像后sar图像中目标像素点r
fi
的距离,rri'(η)表示该目标像素点到第i个接收站位置的距离。
[0068]
s23、接收目标r
p
=(x,y,z)的回波并成像处理后,仅考虑地面上的目标(高度为零),将r
p
投影至(xj,yk,0),则有:
[0069]
r(η;x,y,z)=r(η;xj,yk,0)
[0070]
其中,r(η;x,y,z)表示目标r
p
的距离历史,r(η;xj,yk,0)表示成像处理后像素点的距离历史,即三维目标会被投影至与其距离历史相等的sar图像像素点,上式即为三维目标空间位置与sar图像像素点间的映射关系式。
[0071]
s24、对于目标高度非零的情况,依然满足上式,但此时其成像结果将无法反映目标的真实位置信息,并且该投影位置是由目标的位置和发射平台与接收平台的飞行轨迹决定的,对于步骤s1中的构型,则空间目标和sar图像像素距离历史之间的关系可以表示为:
[0072]
r(i)(η)=r
f(i)
(η)
[0073]
在本实施例中,所述步骤s3中,具体如下:
[0074]
s31、由步骤s2中距离历史之间的对应关系,对其分别在方位时刻为0(η=0)处进行泰勒展开:
[0075]
[0076][0077]
s32、因为在任意方位时刻距离历史的等式都成立,因此经展开后对应的零阶分量和一阶分量相等,则对于两幅图像中同一目标散射点,可得下列方程组:
[0078][0079]
s33、由步骤s32得到一个非线性方程组,使用牛顿迭代法或最小二乘法求解,最终能够得到未知数(x,y,z),即求得空间目标的三维位置矢量r
p
。
[0080]
在本实施例中,所述步骤s4中,具体如下:
[0081]
通过两幅双基地sar图像中对应散射点的位置信息,求解步骤s33中得到的非线性方程组来反求目标的真实位置,将恢复得到的散射点组合形成点云即可完成初步三维表面重建,最终结果如图5所示。
[0082]
仿真结果如图3、图4和图5所示,图3和图4为多基sar系统中两个不同接收站接收回波并进行成像处理的仿真结果图,图5为根据图3和图4基于本发明方法最终得到的三维表面重建结果图。图5的成像结果显示散射点的位置得到了有效的恢复,即完成了三维目标的高度信息计算,并且计算得到的结果坐标误差在允许范围之内,验证了本发明方法的有效性。
[0083]
本领域的普通技术人员将会意识到,这里所述的实施例是为了帮助读者理解本发明的原理,应被理解为本发明的保护范围并不局限于这样的特别陈述和实施例。本领域的普通技术人员可以根据本发明公开的这些技术启示做出各种不脱离本发明实质的其它各种具体变形和组合,这些变形和组合仍然在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1