一种空间同向伴飞的卫星编队干涉成像探测方法及系统
1.本发明属于基于卫星编队的被动微波干涉成像技术领域,尤其涉及一种空间同向伴飞的卫星编队干涉成像探测方法及系统。
背景技术:
2.利用多颗卫星编队飞行进行干涉成像探测是提高空间分辨率的重要手段。每颗卫星携带微波辐射计,利用多颗卫星编队飞行形成干涉基线,基于干涉成像原理进行成像反演。
3.以中心卫星或虚拟卫星为中心,卫星进行环绕伴飞,根据相对运动位置方程可知,无长期相对漂移时,伴飞卫星相对于中心卫星的相对运动轨迹为空间椭圆,伴飞周期等于中心卫星的轨道周期。星下点圆形伴飞意味着星下点投影面为圆。若干颗卫星在不同半径、不同初始相位的情况下,以星下点方法为参考,伴飞卫星的相对运动为逆时针或顺时针同向旋转。
4.根据干涉成像原理,每两颗卫星的相对位置矢量形成空间频率域的一条探测基线。相对位置矢量在星下点方向的投影矢量为投影探测基线(简称“基线”)。伴飞卫星相对于中心星的相对运动为投影圆,不同卫星分布在不同半径上,角速度相同,同向旋转。根据基线分析,空间同向伴飞卫星,所形成的基线同样为圆形分布。基线长度具有不变性,基线方向随着卫星伴飞一周旋转一周。
5.空间多环同向伴飞卫星编队,探测基线在径向和周向具有连续性和均匀性。
6.常规的干涉成像卫星编队构型,通常为多星线性编队、t型编队、十字编队、同一半径空间圆或星下点圆等,所形成的探测基线在径向和周向的连续性和均匀性有待优化提升。
技术实现要素:
7.针对现有技术所形成的探测基线在径向和周向的连续性和均匀性有待优化提升的技术缺陷,本发明的目的在于克服上述现有技术缺陷,提出了一种空间同向伴飞的卫星编队干涉成像探测方法及系统。不同卫星分布在不同半径上,所形成的探测基线具有长度不变性,为圆形采样,在径向和周向都具有连续性和均匀性,有效提高了基线覆盖的致密性;相比多颗卫星部署在一个圆上伴飞,也降低了部署的难度。
8.为了实现上述目的,本发明提出了一种空间同向伴飞的卫星编队干涉成像探测方法,所述方法包括:
9.步骤1)设置中心卫星或虚拟中心卫星及n颗同向伴飞的编队卫星的初始参数;
10.步骤2)计算n颗编队伴飞卫星的相对轨道要素;
11.步骤3)根据步骤2)得到的相对轨道要素计算得到绝对轨道要素;
12.步骤4)根据步骤3)得到的绝对轨道要素,预报每颗伴飞卫星的位置,计算得到每两颗伴飞卫星形成的探测基线;
13.步骤5)根据步骤4)得到的探测基线计算基线分布均匀性度量函数,作为目标函数,利用优化算法进行寻优探索,得到最优解;
14.步骤6)基于最优解重复步骤2)-4),得到在径向和周向都具有连续性和均匀性的探测基线;
15.步骤7)根据步骤6)得到的探测基线,基于干涉成像原理进行成像反演。
16.作为上述方法的一种改进,所述步骤1)的初始参数包括:
17.中心卫星或虚拟中心星的轨道六要素:半长轴a0,离心率e0,轨道倾角i0,近日点辐角ω0,升交点黄经ω0,平近点角m0;
18.n颗卫星分布在k个星下点圆上,每个圆上有nk颗卫星,第k个圆半径的初值为rk,k=1,2,...,k,最大圆半径为r,第j颗伴飞卫星分布的初始相位角初值为并确定伴飞方向为逆时针或顺时针方向。
19.作为上述方法的一种改进,所述步骤2)具体包括:
20.当伴飞方向为顺时针,第j颗伴飞卫星的相对轨道要素满足下式:
[0021][0022]
其中,δaj,δe
xj
,δe
yj
,δi
xj
,δi
yj
,δmj分别表示相对半长轴、x方向相对离心率、y方向相对离心率,x方向相对轨道倾角,y方向相对轨道倾角和相对平近点角;
[0023]
当伴飞方向为逆时针,第j颗伴飞卫星的相对轨道要素满足下式:
[0024][0025]
作为上述方法的一种改进,所述步骤3)具体包括:
[0026]
由下式得到第j颗伴飞卫星的绝对轨道要素:
[0027][0028]
其中,aj、ej、ij、ωj、ωj和mj分别表示第j颗伴飞卫星的半长轴、离心率、轨道倾角、近日点辐角、升交点黄经和平近点角。
[0029]
作为上述方法的一种改进,所述步骤4)具体包括:
[0030]
根据步骤3)所得到的伴飞卫星绝对轨道要素,计算第j颗伴飞卫星的位置rj(x,y,z),第i颗伴飞卫星的位置ri(x,y,z),i,j=1,...,n,并计算每两颗卫星所形成探测基线,记为b(u,v,w)。
[0031]
作为上述方法的一种改进,所述步骤5)具体包括:
[0032]
根据步骤4)得到的探测基线计算分布均匀性度量函数cornwell指标m
cs
(b1,b2,...,bs):
[0033][0034]
其中,s为n颗伴飞卫星形成的探测基线数,s=n
×
(n-1)/2,b1,b2,...,bs表示某时刻的s条探测基线;
[0035]
以cornwell指标为目标函数,各圆半径、每个圆上卫星数、每颗卫星分布的初始相位角为优化变量,进行寻优搜索,获得最优解。
[0036]
作为上述方法的一种改进,所述步骤6)的探测基线包括:
[0037]
同环所形成的探测基线成圆形分布,满足下式:
[0038][0039]
其中,(u,v)表示第i颗伴飞卫星和第j颗伴飞卫星形成的探测基线上任意一点的投影;
[0040]
不同环间所形成的探测基线,满足下式:
[0041][0042]
作为上述方法的一种改进,所述步骤7)具体包括:
[0043]
根据步骤6)得到的(u,v),由下式计算对应的可见度函数viss(u,v):
[0044][0045]
依据干涉成像的基本原理,通过下式获得反演图像tb(ξ,η):
[0046][0047]
其中,(ξ,η)为图像各点的位置坐标。
[0048]
另一方面,本发明提出了一种空间同向伴飞的卫星编队干涉成像探测系统,所述
系统包括:
[0049]
初始参数设置模块,用于设置中心卫星或虚拟中心卫星及n颗编队伴飞卫星的初始参数;
[0050]
相对轨道要素计算模块,用于计算n颗编队伴飞卫星的相对轨道要素;
[0051]
绝对轨道要素计算模块,用于根据相对轨道要素计算模块得到的相对轨道要素计算得到绝对轨道要素;
[0052]
探测基线计算模块,用于得到的绝对轨道要素,预报每颗伴飞卫星的位置,计算得到每两颗伴飞卫星形成的探测基线;
[0053]
寻优模块,用于根据探测基线计算模块得到的探测基线计算基线分布均匀性度量函数,作为目标函数,利用优化算法进行寻优探索,得到最优解;
[0054]
基于最优解的探测基线计算模块,用于基于寻优模块得到在径向和周向都具有连续性和均匀性的探测基线;和
[0055]
成像反演模块,用于根据基于最优解的探测基线计算模块得到的探测基线,基于干涉成像原理进行成像反演。
[0056]
与现有技术相比,本发明的优势在于:
[0057]
空间同向伴飞的卫星编队干涉成像探测方式,伴飞方式为星下点圆,所形成的探测基线具有长度不变性,为圆形采样,在径向和周向都具有连续性和均匀性,有效提高了基线覆盖的致密性;相比多颗卫星部署在一个圆上伴飞,也降低了部署的难度。
附图说明
[0058]
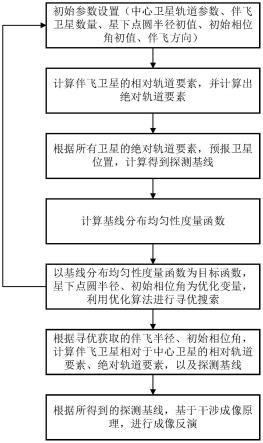
图1是本发明的空间同向伴飞的卫星编队干涉成像探测方法流程图;
[0059]
图2是多颗卫星多环同向星下点圆构型示意图;
[0060]
图3是星下点投影平面(xy平面)相对轨迹示意图;
[0061]
图4是一段时间基线分布情况示意图;
[0062]
图5是一个轨道周期基线分布示意图;
[0063]
图6是模拟原图;
[0064]
图7是干涉反演图。
具体实施方式
[0065]
本发明提出一种空间同向伴飞的卫星编队干涉成像探测方式,伴飞方式为星下点圆。为获得均匀分布的基线和最佳的干涉成像结果,已知中心卫星、最大环绕半径、卫星数量的情况下,提出了伴飞卫星轨道要素的最优化计算方法。
[0066]
下面结合附图和实施例对本发明的技术方案进行详细的说明。
[0067]
实施例1
[0068]
如图1所示,本发明的实施例1提供了一种空间同向伴飞的卫星编队干涉成像探测方法,具体描述如下:
[0069]
步骤1)、设置中心卫星(或虚拟中心星)的轨道参数(a0,e0,i0,ω0,ω0,m0)。假定有n颗卫星进行编队伴飞,分布在k个圆上,每个环上有nk颗卫星。各圆半径初值为rk(j=1,2,...,k),每颗卫星分布的初始相位角初值为最大环半径为r,并确定伴
飞方向为逆时针或顺时针。如图2所示多颗卫星多环同向星下点圆构型示意图;
[0070]
步骤2)、根据步骤1)得到的k个圆上nk颗卫星的伴飞半径rk、初始相位伴飞方向,计算所有卫星的相对轨道要素(δaj,δe
xj
,δe
yj
,δi
xj
,δi
yj
,δmj),编队方式为星下点圆形,空间多环同向伴飞。
[0071]
第j颗卫星的相对轨道要素为:(δaj,δe
xj
,δe
yj
,δi
xj
,δi
yj
,δmj),若顺时针伴飞计算如下:
[0072][0073]
若逆时针伴飞计算如下:
[0074][0075]
步骤3)根据步骤2)所有卫星的相对轨道要素(δaj,δe
xj
,δe
yj
,δi
xj
,δi
yj
,δmj),计算绝对轨道要素(a,e,i,ω,ω,m)。
[0076]
由卫星的相对轨道要素计算绝对轨道要素:
[0077][0078]
步骤4)根据步骤3)所得到的环绕卫星绝对轨道要素,计算卫星位置rj(x,y,z),并计算每两颗卫星所形成探测基线δr
i,j
(u,v,w)。空间频率基线为:δr
i,j
=r
i-rj,其中i,j=1,...,n,记为b(u,v,w)。
[0079]
步骤5)、根据基线计算分布均匀性度量函数cornwell指标,以cornwell指标为目标函数,各圆半径、每个圆上卫星数、每颗卫星分布的初始相位角为优化变量,进行寻优搜索。进而,获得最优解。
[0080]
n颗卫星形成的基线共有s=n
×
(n-1)/2条。对某一时刻的s条基线为δr1,δr2,...,δrs,则分布均匀性度量函数计算如下:
[0081][0082]
步骤6)、根据最优解,重复步骤2)、3)、4)。探测基线在径向和周向都具有连续性和均匀性。
[0083]
基线特性分析如下:
[0084]
(1)同环所形成的基线
[0085]
假设第1环的圆半径为r1,两颗卫星均部署在该圆环上,两颗卫星的初始相位分别为同环只能同向旋转。则两颗卫星投影位置为:
[0086][0087]
由于两颗卫星伴飞角速度相同,因此随时间变化的角度相同。两颗卫星形成的基线为:
[0088][0089]
由上式可知,
[0090][0091]
由此可见,同环上同向旋转的卫星,基线为圆形分布。
[0092]
(2)不同环间所形成的基线
[0093]
假设第1环的圆半径为r1,第2环的圆半径为r2,两颗卫星的初始相位分别为两个空间环同向旋转。则位于第1环的卫星投影位置为:
[0094][0095]
位于第2环的卫星投影位置为:
[0096][0097]
由于两颗卫星伴飞角速度相同,因此随时间变化的角度相同。两颗卫星形成的基线为:
[0098][0099]
由上式可知,
[0100]
[0101]
由此可见,不同环间卫星所形成的基线为圆形分布。圆半径与两环半径、卫星初始相位差有关。当卫星初始相位差为0时,基线长度最短,为|r
1-r2|;当卫星初始相位差为pi时,基线长度最长,为|r1+r2|。
[0102]
步骤7)、根据步骤6)所得到的干涉基线,可基于干涉成像原理进行成像反演。
[0103]
假设tb为二维模拟图像亮温,(ξ,η)为图像各点的位置坐标。投影探测基线为(u,v),依据下式计算(u,v)对应的可见度函数viss:
[0104][0105]
依据干涉成像的基本原理,通过下式获得反演图像:
[0106][0107]
实施例2
[0108]
本发明的实施例2提出了一种空间同向伴飞的卫星编队干涉成像探测系统,基于实施例1的方法实现,该系统包括:
[0109]
初始参数设置模块,用于设置中心卫星或虚拟中心卫星及n颗编队伴飞卫星的初始参数;
[0110]
相对轨道要素计算模块,用于计算n颗编队伴飞卫星的相对轨道要素;
[0111]
绝对轨道要素计算模块,用于根据相对轨道要素计算模块得到的相对轨道要素计算得到绝对轨道要素;
[0112]
探测基线计算模块,用于得到的绝对轨道要素,预报每颗伴飞卫星的位置,计算得到每两颗伴飞卫星形成的探测基线;
[0113]
寻优模块,用于根据探测基线计算模块得到的探测基线计算基线分布均匀性度量函数,作为目标函数,利用优化算法进行寻优探索,得到最优解;
[0114]
基于最优解的探测基线计算模块,用于基于寻优模块得到在径向和周向都具有连续性和均匀性的探测基线;
[0115]
成像反演模块,用于根据基于最优解的探测基线计算模块得到的探测基线,基于干涉成像原理进行成像反演
[0116]
仿真示例
[0117]
以9颗卫星星下点圆编队为例,仿真模拟过程如下:
[0118]
1)9颗卫星分布在3环上的示例,如图3所示为星下点投影平面(xy平面)相对轨迹示意图;
[0119]
2)一段时间基线分布情况示意图,如图4所示;
[0120]
3)一个轨道周期的基线分布情况示意图如图5所示;
[0121]
4)仿真原图如图6所示;
[0122]
5)干涉成像反演图如图7所示。
[0123]
最后所应说明的是,以上实施例仅用以说明本发明的技术方案而非限制。尽管参照实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,对本发明的技术方案进行修改或者等同替换,都不脱离本发明技术方案的精神和范围,其均应涵盖在本发明
的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1