一种基于毫米波雷达的姿态识别检测方法与流程
1.本发明涉及毫米波雷达及姿态检测技术领域,具体涉及一种基于毫米波雷达的姿态识别检测方法。
背景技术:
2.随着物联网技术的快速发展,毫米波雷达在监测领域中得到广泛应用。毫米波雷达不仅克服了容易受到光线、温度干扰影响性能表现的弱点,而且能够在不侵犯用户隐私的前提下准确判断室内是否有人,这使得毫米波雷达在智能家居中更具有泛用性。在智能家居场景中,基于毫米波雷达技术的人体存在传感器还能够实时进行动静、空间、方向和远近等全方位的侦测,它能够检测到小至零点几毫米的人体微动,通过检测人体微动带来的微波信号变化,精准判定人体在空间内的存在状态,位置及移动轨迹;也能够对人体的站立、坐、躺、跌倒等动作进行分类识别。在家庭监控和医疗等领域,毫米波雷达对目标动作姿态的准确监测,有着重要的应用价值,这其中的技术就要求毫米波雷达能够精准的识别出人处于何种状态之下。
3.目前,大多毫米波雷达对目标动作识别的算法是基于微多普勒特征进行识别,现有技术中都是从设计开发的角度去实现毫米波雷达的目标姿态识别的算法,而没有一个从测试的角度去系统测试其目标姿态识别的方法,缺少有效的手段来评估毫米波雷达的姿态识别准确率,也缺少有效的检测模型来保证目标姿态识别检测的全面实施。
技术实现要素:
4.本发明的目的在于提供一种基于毫米波雷达的姿态识别检测方法,以解决上述背景技术中仅有从设计开发的角度去实现毫米波雷达的目标姿态识别的算法,而没有一个从测试的角度去系统测试其目标姿态识别的方法,缺少有效的手段来评估毫米波雷达的姿态识别准确率,也缺少有效的检测方法来保证目标姿态识别检测的问题。
5.为实现上述目的,本发明提供如下技术方案:
6.一种基于毫米波雷达的姿态识别检测方法,包括以下步骤:
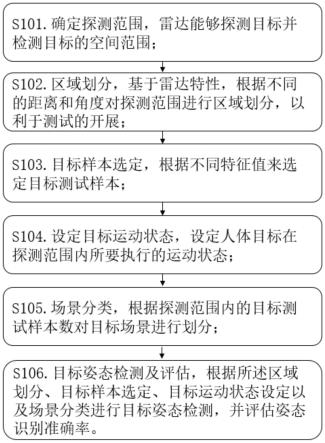
7.s101.确定探测范围,雷达能够探测目标并检测目标的空间范围;
8.s102.区域划分,基于雷达特性,根据不同的距离和角度对探测范围进行区域划分,以利于测试的开展;
9.s103.目标样本选定,根据不同特征值来选定目标测试样本;
10.s104.设定目标运动状态,设定人体目标在探测范围内所要执行的运动状态;
11.s105.场景分类,根据探测范围内的目标测试样本数对目标场景进行划分;
12.s106.目标姿态检测及评估,根据所述区域划分、目标样本选定、目标运动状态设定以及场景分类进行目标姿态检测,并评估其姿态识别准确率。
13.进一步的技术方案是:所述s101中,根据毫米波雷达进行分析确定探测范围,探测范围包括水平最大探测距离和方位角范围。
14.进一步的技术方案是:所述s102中,对探测范围进行区域划分的方法为:
15.以2米的长度将水平最大探测距离d米进行分割成若干个空间,再将分割成的各空间进行等分,将探测范围划分成n个区域。
16.进一步的技术方案是:所述s102中,进行区域划分的方法,具体包括:
17.(a1).若d为偶数,则划分成d/2个空间,第一个空间2等分,第二个空间4等分,第三个空间6等分,以此类推,第d/2空间d等分,则n=2+4+
……
+d;
18.(a2).若d为奇数,则划分成(d+1)/2个空间,第一个空间2等分,第二个空间4等分,第三个空间6等分,以此类推,第(d+1)/2空间(d+1)等分,则n=2+4+
……
+(d+1);
19.(a3).若d为小数,向上取整,判别奇偶,再同(1)或(2)进行划分;
20.(a4).最终将探测范围划分为n个区域,且n为偶数。
21.进一步的技术方案是:所述s103中,
22.所述不同特征值,包括不同性别、不同身高和不同bmi情况,不同特征的样本目标姿态检测的情况有所不同;
23.所述目标测试样本的选定规则为:
24.(b1).设定男女比例;
25.(b2).设定bmi情况;
26.(b3).根据不同身高划分为若干个身高组,并设定不同身高的比例;
27.(b4).根据不同身高的不同bmi情况进行选定,使每个身高组都包括bmi的三种不同情况,形成k个样本。
28.进一步的技术方案是:所述s104中,设定目标运动状态,所设定的运动状态包括m组动作,每组动作由不同特征的目标在探测范围内划分的各区域重复执行多次,并记录姿态检测结果。
29.进一步的技术方案是:所述m组动作至少包括走动、站立、弯腰、坐下、躺下、蹲下、起立和跌倒。
30.进一步的技术方案是:所述s105中,目标场景进行划分为:单目标场景和多目标场景。
31.进一步的技术方案是:所述s106中,包括:
32.目标姿态检测,在探测到存在人体目标的前提下,判断目标当前处于何处运动状态,完成对目标行为的理解,用姿态识别准确率来衡量;
33.评估姿态识别准确率,雷达正确检测目标姿态的比例,即毫米波雷达正确检测目标姿态次数与总检测目标姿态次数的比值,并用百分数表示。
34.进一步的技术方案是:所述s106中,具体的,根据目标场景划分,目标姿态检测包括单目标场景下的目标姿态检测和多目标场景下的目标姿态检测;
35.单目标场景下的目标姿态检测,方法包括:k个样本中每个样本依次在n个区域执行m组所设定的动作,每组动作重复l次,同时记录k个样本在每个区域目标姿态检测结果,并计算各区域的姿态识别准确率,最后再根据各区域的姿态识别准确率综合计算整个探测区域的姿态识别准确率;
36.多目标场景下的目标姿态检测,方法包括:探测范围最大目标识别数为t,且t≤k;在多目标场景下,进行多轮次不同目标数的姿态检测,每一轮目标会遍历n个区域,在每个
区域执行m组所设定的动作,每组动作执行l次,最后记录检测结果并计算姿态识别准确率。
37.与现有技术相比,本发明的有益效果是:
38.本发明提供一种新的姿态识别方法,能够系统地测试毫米波雷达的姿态识别,评估其姿态识别准确率;能够从测试的角度指导毫米波雷达目标姿态识别检测的全面实施,简化了毫米波雷达姿态识别测试的复杂度,测试效率高,易于开展实施。
附图说明
39.图1为本发明一种基于毫米波雷达的姿态识别检测方法的流程图。
40.图2为本发明一个实施例中的区域划分图。
41.图3为本发明一个实施例中的性别分布情况饼图。
42.图4为本发明一个实施例中的bmi分布情况1:1:1饼图。
43.图5为本发明一个实施例中的身高分布情况条形图。
44.图6为本发明一个实施例中的目标运动状态描述图。
45.图7为本发明一个实施例中的单目标姿态检测网络图。
具体实施方式
46.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
47.实施例
48.参照附图1,一种基于毫米波雷达的姿态识别检测方法,包括以下步骤:
49.s101.确定探测范围,雷达能够探测目标并检测目标的空间范围。
50.具体的,确定探测范围,包括:探测范围,可根据毫米波雷达的应用领域、技术规范或用户需求等方面进行分析确定。其中,毫米波雷达的正常运行探测范围一般呈扇形。
51.在本实施例中,实验场景为:8米*8米的房间内,毫米波雷达的水平最大探测距离是6米,方位角范围是-60
゜
~+60
゜
,目标样本在距离雷达的0到6米范围内活动,周围环境没有移动物体的干扰,且雷达最大目标识别数为10个。
52.s102.区域划分,基于雷达特性,根据不同的距离和角度对探测范围进行区域划分,以利于测试的开展。
53.具体的,区域划分,包括:将探测范围划分成n个区域:以2米的长度将水平最大探测距离d米进行分割成多个空间,再将分割成的各空间进行等分,最终划分为n个区域。存在以下几种情况:
54.(1)若d为偶数,则划分成d/2个空间,第一个空间2等分,第二个空间4等分,第三个空间6等分,以此类推,第d/2空间d等分,则n=2+4+
……
+d;
55.(2)若d为奇数,则划分成(d+1)/2个空间,第一个空间2等分,第二个空间4等分,第三个空间6等分,以此类推,第(d+1)/2空间(d+1)等分,则n=2+4+
……
+(d+1);
56.(3)若d为小数,向上取整,判别奇偶,再同(1)或(2)进行划分。
57.(4)最终将探测范围划分为n个区域,且n为偶数。
58.在本实施例中,以2米的长度将最大水平探测距离6米的区域划分成三个空间:第一个空间2等分,第二个空间4等分,第三个空间6等分,则n=2+4+6=12个。具体划分如图2所示。
59.s103.目标样本选定,根据不同特征值来选定目标测试样本。
60.具体的,目标样本选定,包括:所述不同特征值,包括不同性别、不同身高、不同bmi情况,不同特征的样本目标姿态检测的情况也会有所不同,因此,需要进行目标样本选定,规则如下:
61.(1).男女比例可根据实际情况进行设定,如3:2或1:1等;
62.(2).不同bmi情况(bmi低于18.5、bmi在18.5-23.99之间、bmi高于24),其比例为可根据实际需求设定,如1:1:1等;
63.(3).根据不同身高划分为150cm~155cm;155cm~160cm;160cm~165cm;165cm~170cm;170cm~175cm;175cm~180cm;180cm~185cm七个身高组,其比例可根据实际情况进行设定,如1:2:3:3:3:2:1等;
64.(4).根据不同身高的不同bmi情况进行选定,即每个身高组都包括bmi的三种不同情况;共计k个样本。
65.在本实施例中:
66.(1)男女比例为3:2,性别分布情况如图3所示;
67.(2)不同bmi情况(bmi低于18.5、bmi在18.5-23.99之间、bmi高于24),其比例为1:1:1,bmi分布情况如图4所示;
68.(3)根据不同身高划分为150cm~155cm;155cm~160cm;160cm~165cm;165cm~170cm;170cm~175cm;175cm~180cm;180cm~185cm七个身高组,其比例设定为1:2:3:3:3:2:1。
69.(4)根据不同身高的不同bmi情况进行选定,即每个身高组中都会包含bmi的三种情况,因此七个身高的样本最小取值分别为:3,6,9,9,9,6,3。共计k=45,其中男女分别为27、18个。身高分布情况如图5所示。
70.s104.设定目标运动状态,设定人体目标在探测范围内所要执行的运动状态。
71.具体的,设定目标运动状态,其中,所设定的运动状态包括m组动作,如走动、站立、弯腰、坐下、躺下、蹲下、起立、跌倒等。每组动作由不同特征的目标在探测范围内划分的各区域重复执行多次,并记录姿态检测结果。
72.本实施例中,设定8组动作:
73.(1)走动:目标以相对平稳的速度行走,伴随着双臂与双腿的正常摆动,时间持续为10秒钟;
74.(2)站立:先走动5秒,然后站立,并保持10秒钟;
75.(3)弯腰:先站立5秒,然后弯腰,并保持10秒钟;
76.(4)坐下:先站立5秒,然后坐下,并保持10秒钟;
77.(5)躺下:先站立5秒,然后躺在沙发上,并保持10秒钟;
78.(6)蹲下:先站立5秒,然后蹲下,并保持10秒钟;
79.(7)起立:先站立5秒,然后坐在椅子上5秒,再起立,并保持10秒钟;
80.(8)跌倒:先站立5秒,然后倒在垫子上,并保持10秒钟,方向包括:向前跌、向后跌、
向左跌、向右跌。
81.每组动作由不同特征的目标在探测范围内划分的不同区域重复多次,并记录姿态检测结果。运动状态描述如图6所示。
82.s105.场景分类,根据探测范围内的目标测试样本数对目标场景进行划分。
83.具体的,场景分类,包括:不同目标数的目标姿态检测情况也会有所不同,当探测范围中只有一个目标样本时该场景被定为单目标场景,当探测范围中存在两个或以上目标样本时,被定为多目标场景。
84.s106.目标姿态检测及评估,根据所述区域划分、目标样本选定、目标运动状态设定以及场景分类,进行目标姿态检测,并评估其姿态识别准确率。
85.具体的,目标姿态检测及评估,包括:目标姿态检测,指在探测到存在人体目标的前提下,判断目标当前处于何处运动状态,完成对目标行为的理解,用姿态识别准确率来衡量。评估姿态识别准确率,是指雷达正确检测目标姿态的比例,即毫米波雷达正确检测目标姿态次数与总检测目标姿态次数的比值,通常用百分数表示。
86.进一步的,还包括:根据所述场景分类,目标姿态检测包括单目标场景下的目标姿态检测和多目标场景下的目标姿态检测。
87.单目标场景下的目标姿态检测,方法包括:k个样本中每个样本依次在n个区域执行m组所设定的动作,每组动作重复l次,同时记录k个样本在每个区域目标姿态检测结果,并计算各区域的姿态识别准确率,最后再根据各区域的姿态识别准确率综合计算整个探测区域的姿态识别准确率。各区域检测情况:
88.区域1:k个样本正确检测姿态次数分别为d11、d12、
……
、d1k,该区域总共执行动作k*m*l次,姿态识别准确率为:r1=(d11+d12+
……
+d1k)/(k*m*l);
89.区域2:k个样本正确检测姿态次数分别为d21、d22、
……
、d2k,该区域总共执行动作k*m*l次,姿态识别准确率为:r2=(d21+d22+
……
+d2k)/(k*m*l);
90.以此类推,区域n:k个样本正确检测姿态次数分别为dn1、dn2、
……
、dnk,该区域总共执行动作k*m*l次,姿态识别准确率为:rn=(dn1+dn2+
……
+dnk)/(k*m*l);
91.综上,整个探测区域的姿态识别准确率为:r=(r1+r2+
……
+rn)/n。
92.在本实施例中,45个样本依次在12个区域中执行8组动作:走动、站立、弯腰、坐下、躺下、蹲下、起立、跌倒,每组动作重复200次,并记录姿态检测结果。单目标姿态检测网络图如图7所示。
93.各区域情况为:
94.区域1:45个样本正确检测姿态次数分别为d11、d12、
……
、d1k,总共执行动作45*8*200次,该区域姿态识别准确率为:r1=(d11+d12+
……
+d1k)/(45*8*200);
95.区域2:45个样本正确检测姿态次数分别为d21、d22、
……
、d2k,总共执行动作45*8*200次,该区域姿态识别准确率为:r2=(d21+d22+
……
+d2k)/(45*8*200);
96.以此类推,区域12:45个样本正确检测姿态次数为dn1、dn2、
……
、dnk,总共执行动作45*8*200次,该区域姿态识别准确率为:r12=(dn1+dn2+
……
+dnk)/(45*8*200);
97.综上,整个探测区域的检测率为:r=(r1+r2+
……
+r12)/12。
98.多目标场景下的目标姿态检测,方法包括:探测范围最大目标识别数为t,且≤k。在多目标场景下,进行多轮次不同目标数的姿态检测,每一轮目标会遍历n个区域,在每个
区域执行m组所设定的动作,每组动作执行l次,最后记录检测结果并计算姿态识别准确率。规则如下:
99.1)目标数:第一轮目标数为2,之后每一轮以目标数p(1≤p《t≤n或1≤p《n《t)进行递增,直至目标数达到最大目标识别数t(当t≤n时)或者达到目标数n以致能够直接覆盖n个区域(当t》n时)为止(注:最后一轮只新增(t-2)%p或(n-2)%p个目标)。
100.2)目标姿态检测轮次:当t《=n时,若(t-2)%p=0,则会进行z=1+(t-2)/p轮,否则会进行z=1+(t-2)/p+1轮;当t》n时,若(n-2)%p=0,则会进行z=1+(n-2)/p轮,否则会进行z=1+(n-2)/p+1轮;
101.3)目标选择:每一轮在k个样本中选择相应数量的不同特征的目标,且目标不重复;
102.4)目标动作:每一轮中目标进入对应数量的区域,执行m组所设定的动作l次,并记录姿态检测结果;重复3)步骤,直至目标遍历完所有区域;
103.5)统计不同目标数下的姿态识别准确率,最后再综合统计多目标场景下姿态识别准确率。
104.所述多目标场景下的目标姿态检测,具体实施包括:首先第1轮2个目标遍历所有区域,第2轮2+p个目标遍历所有区域,以此类推,直至目标数达到最大目标识别数t(当t《=n时)或者达到目标数n以致能够直接覆盖n个区域(当t》n时)为止。步骤如下:
105.第1轮:
106.(1)k个样本中选择2个不同特征的目标进入2个区域,执行m组动作,每组动作重复l次,并记录姿态检测结果;
107.(2)重复上述(1)步骤,2个目标遍历未检测的区域,直至所有区域被覆盖;
108.(3)n个区域需要2个目标执行n/2次;
109.(4)各区域姿态检测正确次数分别为t11、t12、
……
、t1n,该轮姿态识别准确率:mr1=(t11+t12+
……
+t1n)/(n*m*l)。
110.第2轮:
111.(1)k个样本中选择2+p个不同特征的目标进入2+p个区域,执行m组动作,每组动作重复l次,并记录姿态检测结果;
112.(2)重复上述(1)步骤,2+p个目标遍历未检测的区域,直至所有区域被覆盖;
113.(3)若n%(2+p)=0,则n个区域需要2+p个目标执行n/(2+p)次;否则需要执行n/(2+p)+1次;
114.(4)各区域姿态检测正确次数分别为t21、t22、
……
、t2n,该轮姿态识别准确率:mr2=(t21+t22+
……
+t2n)/(n*m*l)。
115.以此类推,第z轮:
116.若t《=n时:
117.(1)当目标数递增到t时,选择t个不同特征的目标进入t个区域中,执行m组动作,每组动作重复l次,并记录姿态检测结果;
118.(2)重复上述(1)步骤,t个目标遍历未检测的区域,直至所有区域被覆盖;
119.(3)当n%t=0时,n个区域需要执行n/t次;否则n个区域需要执行n/t+1次;
120.(4)姿态检测正确次数分别为tz1、tz2、
……
、tzn,该轮姿态识别准确率:mrz=
(tz1+tz2+
……
+tzn)/(n*m*l)。
121.当t》n时:
122.(1)当目标数递增到n时,选择n个不同特征的目标进入n个区域中,执行m组动作,每组动作重复l次,并记录姿态检测结果;
123.(2)n个目标直接覆盖n个区域,因此n个区域只需要执行1次;
124.(3)姿态检测正确次数分别为tz1、tz2、
……
、tzn,该轮姿态识别准确率:mrz=(tz1+tz2+
……
+tzn)/(n*m*l)。
125.综上,多目标场景下整个探测区域的姿态识别准确率为:mr=(mr1+mr2+
……
+mrz)/z。
126.在本实施例中,多目标场景下目标数以2个目标进行递增,而雷达最大目标识别数为t=10,且《n=12,则多目标场景下会进行5轮不同目标数的姿态检测。每一轮目标会遍历12个区域,在每个区域执行8组所设定的动作,每组动作执行200次,最后记录检测结果并计算姿态识别准确率。
127.具体情况如下:
128.第1轮:
129.(1)45个样本中选择2个不同特征的目标进入2个区域,执行8组动作200次,并记录姿态检测结果;
130.(2)重复上述(1)步骤,2个目标遍历未检测的区域,直至所有区域被覆盖;
131.(3)12个区域需要2个目标执行6次;
132.(4)各区域姿态检测正确次数分别为t11、t12、
……
、t1n,该轮姿态识别准确率:mr1=(t11+t12+
……
+t1n)/(12*8*200)。
133.第2轮:
134.(1)k个样本中选择4个不同特征的目标进入4个区域,执行8组动作200次,并记录姿态检测结果;
135.(2)重复上述(1)步骤,4个目标遍历未检测的区域,直至所有区域被覆盖;
136.(3)12个区域需要4个目标执行3次;
137.(4)各区域姿态检测正确次数分别为t21、t22、
……
、t2n,该轮姿态识别准确率:mr2=(t21+t22+
……
+t2n)/(12*8*200)。
138.以此类推,第5轮:
139.(1)目标数递增到10时,选择10个不同特征的目标进入10个区域中,执行8组动作200次,并记录姿态检测结果;
140.(2)重复上述(1)步骤,10个目标中选择2个目标进入剩下未检测的2个区域,直至所有区域被覆盖;
141.(3)12个区域需要执行2次;
142.(4)姿态检测正确次数分别为t51、t52、
……
、t5n,该轮姿态识别准确率:mrz=(t51+t52+
……
+t5n)/(12*8*200)。
143.综上,计算多目标场景下的姿态识别准确率为:mr=(mr1+mr2+
……
+mrz)/5。
144.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1