一种标定校验方法、装置、存储介质及电子设备与流程
本说明书涉及无人设备领域,尤其涉及一种标定校验方法、装置、存储介质及电子设备。
背景技术:
1、随着传感器技术的不断进步,结合传感器技术的无人驾驶技术也在迅猛发展。
2、在现有技术中,无人设备可以结合图像传感器与雷达两种传感器进行数据监测,既可以获取物体的语义又能测量物体的深度。但由于不同的传感器的坐标系是独立的,而雷达信息和图像信息需要统一在同一空间和时间维度中才能进行数据融合计算,所以在数据融合前需要将雷达的坐标系转换为图像传感器的坐标系,或将图像传感器的坐标系转换为雷达的坐标系,坐标系的转换准确与否影响着无人设备决策的准确性,即不同的传感器坐标系之间的互相转换至关重要,所以需要对不同的传感器之间的转换矩阵进行标定。
3、然而现有技术主要关注如何对不同的传感器之间的转换矩阵进行标定,但对于已标定的转换矩阵的校验关注较少。更为关键的是,如何在无人设备运行的自然场景而非特定的标定环境中完成在线标定校验是一个亟待解决的问题。
技术实现思路
1、本说明书提供一种标定校验方法、装置、存储介质及电子设备,以至少部分的解决现有技术存在的上述问题。
2、本说明书采用下述技术方案:
3、本说明书提供了一种标定校验方法,包括:
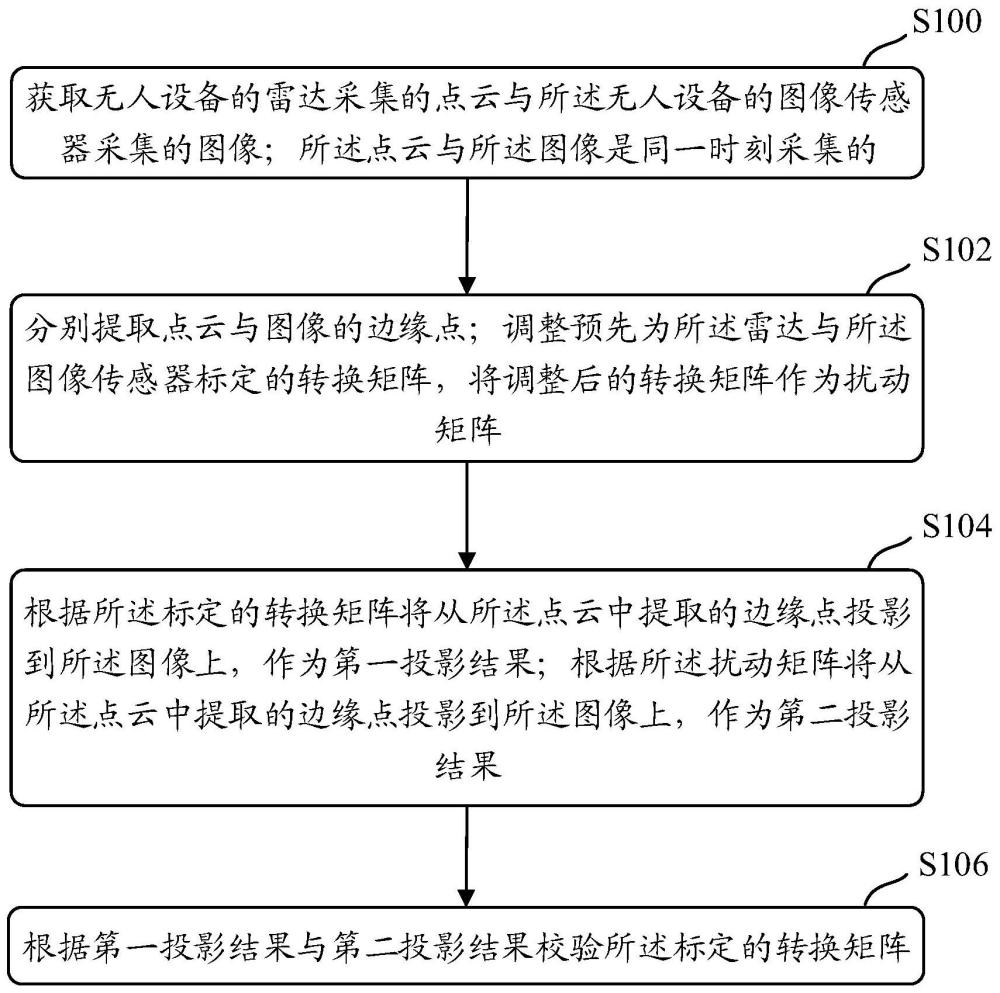
4、获取无人设备的雷达采集的点云与所述无人设备的图像传感器采集的图像;所述点云与所述图像是同一时刻采集的;
5、分别提取点云与图像的边缘点;调整预先为所述雷达与所述图像传感器标定的转换矩阵,将调整后的转换矩阵作为扰动矩阵;
6、根据所述标定的转换矩阵将从所述点云中提取的边缘点投影到所述图像上,作为第一投影结果;根据所述扰动矩阵将从所述点云中提取的边缘点投影到所述图像上,作为第二投影结果;
7、根据第一投影结果与第二投影结果校验所述标定的转换矩阵。
8、可选地,调整预先为所述雷达与所述图像传感器标定的转换矩阵,将调整后的转换矩阵作为扰动矩阵,具体包括:
9、针对每种不同的调整方式,采用该调整方式对预先为所述雷达与所述图像传感器标定的转换矩阵进行调整,将调整后的转换矩阵作为对应于该调整方式的扰动矩阵;
10、其中,所述调整方式包括平移调整与旋转调整中的至少一种,不同的调整方式中平移调整的幅度不同和/或旋转调整的幅度不同;
11、所述平移调整包括对所述雷达和/或图像传感器的位置进行平移调整,所述旋转调整包括对所述雷达和/或图像传感器的方向角进行旋转调整。
12、可选地,根据所述扰动矩阵将从所述点云中提取的边缘点投影到所述图像上,具体包括:
13、针对每个扰动矩阵,根据该扰动矩阵将从所述点云中提取的边缘点投影到所述图像上,作为该扰动矩阵对应的第二投影结果。
14、可选地,根据第一投影结果与第二投影结果校验所述标定的转换矩阵,具体包括:
15、根据所述第一投影结果与图像的边缘点的重合程度,确定所述第一投影结果的准确度;针对每个扰动矩阵,根据该扰动矩阵对应的第二投影结果与图像的边缘点的重合程度,确定该扰动矩阵对应的第二投影结果的准确度;
16、确定准确度低于第一投影结果的准确度的第二投影结果的数量;
17、根据所述数量,校验所述标定的转换矩阵。
18、可选地,获取无人设备的雷达采集的点云与所述无人设备的图像传感器采集的图像,具体包括:
19、针对每个采集时刻,获取无人设备的雷达在该采集时刻采集的点云,以及所述无人设备的图像传感器在该采集时刻采集的图像;
20、根据第一投影结果与第二投影结果校验所述标定的转换矩阵,具体包括:
21、根据基于在每个采集时刻采集的点云和图像确定的第一投影结果和第二投影结果,校验所述标定的转换矩阵。
22、可选地,根据所述数量,校验所述标定的转换矩阵,具体包括:
23、确定所述数量与所述第二投影结果总数的比例,判断所述比例是否大于预设阈值;
24、若是,则判断所述标定的转换矩阵的校验结果为准确,
25、若否,则判断所述标定的转换矩阵的校验结果为不准确。
26、可选地,根据第一投影结果与第二投影结果校验所述标定的转换矩阵,具体包括:
27、根据所述第一投影结果与所述第二投影结果,校验所述标定的转换矩阵在不同方向上是否准确;所述方向包括水平和垂直中的至少一种。
28、可选地,当校验所述标定的转换矩阵在水平方向上是否准确时,提取点云的边缘点,具体包括:
29、提取所述点云中垂直方向的边缘点;
30、当校验所述标定的转换矩阵在垂直方向上是否准确时,提取点云的边缘点,具体包括:
31、提取所述点云中水平方向的边缘点。
32、可选地,当校验所述标定的转换矩阵在水平方向上是否准确时,根据所述标定的转换矩阵将从所述点云中提取的边缘点投影到所述图像上,作为第一投影结果;根据所述扰动矩阵将从所述点云中提取的边缘点投影到所述图像上,作为第二投影结果,具体包括:
33、根据所述标定的转换矩阵,将所述点云中垂直方向的边缘点投影到所述图像上,作为第一投影结果;根据所述扰动矩阵,将所述点云中垂直方向的边缘点投影到所述图像上,作为第二投影结果;
34、当校验所述标定的转换矩阵在垂直方向上是否准确时,根据所述标定的转换矩阵将从所述点云中提取的边缘点投影到所述图像上,作为第一投影结果;根据所述扰动矩阵将从所述点云中提取的边缘点投影到所述图像上,作为第二投影结果,具体包括:
35、根据所述标定的转换矩阵,将所述点云中水平方向的边缘点投影到所述图像上,作为第一投影结果;根据所述扰动矩阵,将所述点云中水平方向的边缘点投影到所述图像上,作为第二投影结果。
36、本说明书提供了一种标定校验装置,包括:
37、采集模块,用于获取无人设备的雷达采集的点云与所述无人设备的图像传感器采集的图像;所述点云与所述图像是同一时刻采集的;
38、调整模块,用于分别提取点云与图像的边缘点;调整预先为所述雷达与所述图像传感器标定的转换矩阵,将调整后的转换矩阵作为扰动矩阵;
39、投影模块,用于根据所述标定的转换矩阵将从所述点云中提取的边缘点投影到所述图像上,作为第一投影结果;根据所述扰动矩阵将从所述点云中提取的边缘点投影到所述图像上,作为第二投影结果;
40、校验模块,用于根据第一投影结果与第二投影结果校验所述标定的转换矩阵。
41、本说明书提供了一种计算机可读存储介质,所述存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述标定校验方法。
42、本说明书提供了一种标定校验设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现上述标定校验方法。
43、本说明书采用的上述至少一个技术方案能够达到以下有益效果:
44、在本说明书提供的校验标定方法中,获取无人设备雷达采集的的点云与同时刻图像传感器采集的图像,分别提取点云与图像的边缘点,分别根据标定的转换矩阵与调整后转换矩阵将点云边缘点投影到图像上,得到两个投影结果,根据两个投影结果校验所述标定的转换矩阵。
45、从上述方法中可以看出,本方法易于操作,方便快捷同时具有准确性,可靠性高。
- 还没有人留言评论。精彩留言会获得点赞!