设备标定方法和电子设备与流程
本技术涉及计算机,尤其涉及一种设备标定方法和电子设备。
背景技术:
1、随着科学技术的发展,一个电子设备上通常设置有多种传感器,以实现对多种数据进行采集及应用。实践中,由于各传感器的坐标系之间通常存在差异,为了实现整个电子设备对各传感器数据进行高效准确处理,通常需要对各传感器之间的参数进行参数标定。
2、相关技术中,激光雷达(比如,单线激光雷达、多线激光雷达)和位姿传感器(比如,里程计)通常是一些电子设备(比如,自移动设备)上的极为关键的两种传感器,为了实现电子设备能够对上述两种传感器的数据进行高效准确处理及应用,需要在对该电子设备出厂之前,对该电子设备上的上述两种传感器之间的参数进行参数标定。
技术实现思路
1、有鉴于此,本技术实施例提供了一种设备标定方法和电子设备,以解决相关技术中,不能有效地对电子设备上的激光雷达和位姿传感器之间的参数进行参数标定的问题。
2、第一方面,本技术实施例提供了一种设备标定方法,包括:
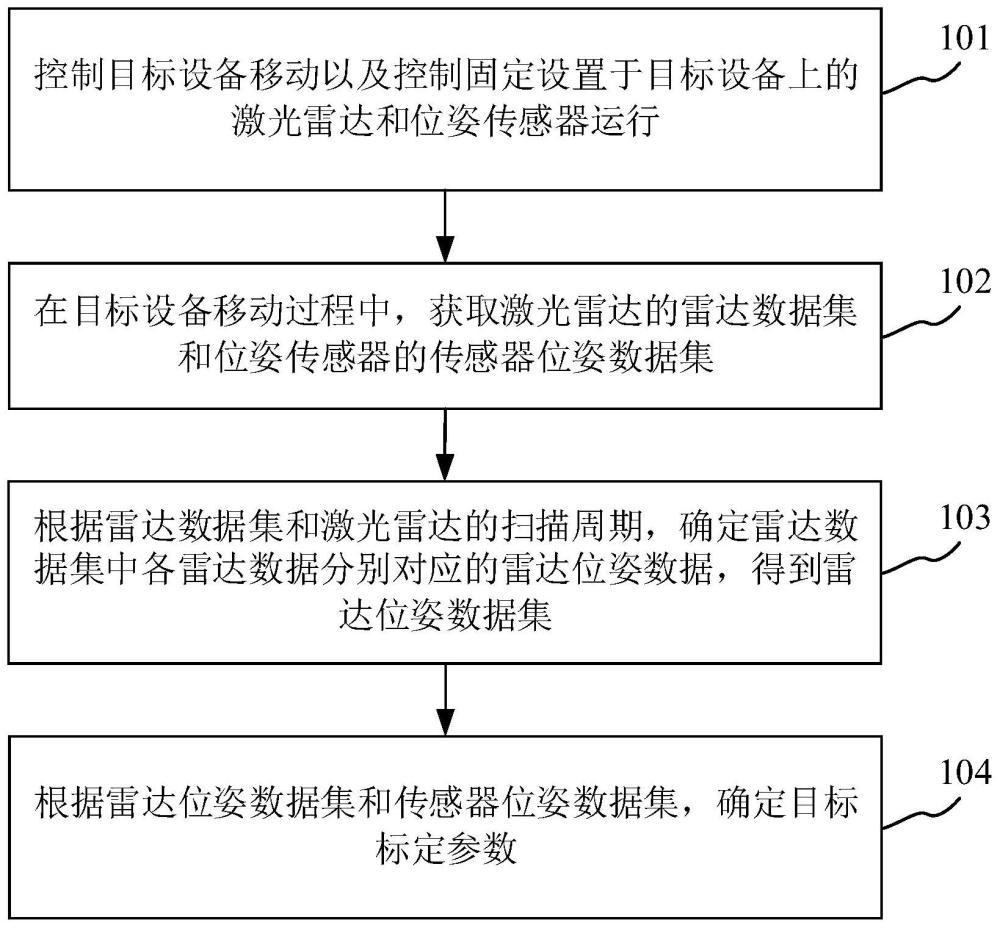
3、控制目标设备移动以及控制固定设置于目标设备上的激光雷达和位姿传感器运行;
4、在目标设备移动过程中,获取激光雷达的雷达数据集和位姿传感器的传感器位姿数据集,其中,雷达数据集中的各雷达数据包括数据采集时间和数据采集时间对应的激光点的测量位置信息;
5、根据雷达数据集和激光雷达的扫描周期,确定雷达数据集中各雷达数据分别对应的雷达位姿数据,得到雷达位姿数据集;
6、根据雷达位姿数据集和传感器位姿数据集,确定目标标定参数,其中,目标标定参数用于雷达坐标系与传感器坐标系之间的转换。
7、在一些实施例中,根据雷达数据集和激光雷达的扫描周期,确定雷达数据集中各雷达数据分别对应的雷达位姿数据,得到雷达位姿数据集,包括:
8、对雷达数据集中的属于同一扫描周期的各雷达数据,执行如下位置确定操作:
9、将扫描周期端点对应的雷达数据记作端点雷达数据,将除端点雷达数据外的雷达数据记作中间雷达数据;
10、根据各端点雷达数据分别对应的测量位置信息,确定相应扫描周期的位姿变化参数,以及根据位姿变化参数确定端点雷达数据对应的雷达位姿数据;
11、根据各雷达数据分别对应的数据采集时间和各端点雷达数据对应的雷达位姿数据,确定各中间雷达数据分别对应的雷达位姿数据。
12、在一些实施例中,根据各端点雷达数据分别对应的测量位置信息,确定相应扫描周期的位姿变化参数,包括:将各端点雷达数据分别对应的测量位置信息输入预先确定的位姿变化公式,得到位姿变化参数,位姿变化参数包括位移变化向量和旋转变化向量;
13、其中,位姿变化公式,包括:
14、
15、其中,δt为位移变化向量,δr为旋转变化向量,p为参考帧点,q为当前帧点描述在参考帧的坐标,q′为当前帧点,q′v为q′的斜对称矩阵,np为p点的法线,其中,参考帧点是作为参考的扫描周期中的激光点的测量位置信息,当前帧点是当前扫描周期中的相应激光点的测量位置信息。
16、在一些实施例中,根据各雷达数据分别对应的数据采集时间和各端点雷达数据对应的雷达位姿数据,确定各中间雷达数据分别对应的雷达位姿数据,包括:
17、针对各中间雷达数据,将相应中间雷达数据对应的数据采集时间和各端点雷达数据对应的雷达位姿数据,代入预先确定的位姿计算公式,得到相应中间雷达数据对应的雷达位姿数据;
18、其中,位姿计算公式,包括:
19、t1=t0*tcom
20、
21、其中,t1为中间雷达数据对应的雷达位姿数据,t0为扫描周期起点处的端点雷达数据对应的雷达位姿数据,te为扫描周期终点,ts为扫描周期起点,tc为扫描周期中的任一时间点,ts_e表示ts到te过程激光雷达产生的位姿变化,tcom表示ts到tc过程激光雷达产生的位姿变化。
22、在一些实施例中,目标标定参数包括目标旋转参数和目标平移参数,以及根据雷达位姿数据集和传感器位姿数据集,确定目标标定参数,包括:
23、根据传感器位姿数据集,生成位姿传感器在各个时刻的第一旋转轴信息,以及根据雷达位姿数据集,生成激光雷达在各个时刻的第二旋转轴信息;根据各第一旋转轴信息、各第二旋转轴信息和预先构建的旋转代价函数,确定目标旋转参数;
24、根据传感器位姿数据集、雷达位姿数据集和目标旋转参数,确定目标平移参数。
25、在一些实施例中,旋转代价函数,包括:
26、
27、其中,f(rx)为旋转代价函数,rx为目标旋转参数,qx为rx的四元数形式,为qx的转置,n为雷达位姿数据集中雷达位姿数据的总个数,q(na_i)表示四元数左乘na_i的矩阵形式,w(nb_i)表示四元数右乘nb_i的矩阵形式,na_i为第i时刻的第一旋转轴信息,nb_i为第i时刻的第二旋转轴信息,qx的模长为1。
28、在一些实施例中,方法还包括:
29、根据预先确定的校准参数,对激光雷达的第一时间坐标系和位姿传感器的第二时间坐标系进行时间校准。
30、在一些实施例中,方法还包括:
31、根据预先构建的优化函数和预先确定的参数更新算法,对目标标定参数进行更新,得到满足预设优化条件的更新后参数,以及将目标标定参数切换为更新后参数。
32、在一些实施例中,优化函数包括:
33、
34、其中,g(xi-xj,2σ2i)为高斯函数,m为扫描周期的总个数,rx为目标旋转参数,tx为目标平移参数,rx与tx为待优化的参数,σ为先验标准差,i为单位矩阵,x′i与x′j为同一激光点在第i个和第j个扫描周期下的测量位置信息,xi为x′i对应时刻位姿传感器在目标设备坐标系下的坐标,xj为x′j对应时刻位姿传感器在目标设备坐标系下的坐标,为与x′i对应时刻下的位姿传感器的传感器位姿数据,为与x′j对应时刻下的位姿传感器的传感器位姿数据。
35、第二方面,本技术实施例提供了一种设备标定装置,包括:
36、设备控制单元,用于控制目标设备移动以及控制固定设置于目标设备上的激光雷达和位姿传感器运行;
37、数据采集单元,用于在目标设备移动过程中,获取激光雷达的雷达数据集和位姿传感器的传感器位姿数据集,其中,雷达数据集中的各雷达数据包括数据采集时间和数据采集时间对应的激光点的测量位置信息;
38、数据确定单元,用于根据雷达数据集和激光雷达的扫描周期,确定雷达数据集中各雷达数据分别对应的雷达位姿数据,得到雷达位姿数据集;
39、参数确定单元,用于根据雷达位姿数据集和传感器位姿数据集,确定目标标定参数,其中,目标标定参数用于雷达坐标系与传感器坐标系之间的转换。
40、在一些实施例中,数据确定单元,具体用于:对雷达数据集中的属于同一扫描周期的各雷达数据,执行如下位置确定操作:
41、将扫描周期端点对应的雷达数据记作端点雷达数据,将除端点雷达数据外的雷达数据记作中间雷达数据;
42、根据各端点雷达数据分别对应的测量位置信息,确定相应扫描周期的位姿变化参数,以及根据位姿变化参数确定端点雷达数据对应的雷达位姿数据;
43、根据各雷达数据分别对应的数据采集时间和各端点雷达数据对应的雷达位姿数据,确定各中间雷达数据分别对应的雷达位姿数据。
44、在一些实施例中,数据确定单元中,上述根据各端点雷达数据分别对应的测量位置信息,确定相应扫描周期的位姿变化参数,包括:将各端点雷达数据分别对应的测量位置信息输入预先确定的位姿变化公式,得到位姿变化参数,位姿变化参数包括位移变化向量和旋转变化向量;
45、其中,位姿变化公式,包括:
46、
47、其中,δt为位移变化向量,δr为旋转变化向量,p为参考帧点,q为当前帧点描述在参考帧的坐标,q′为当前帧点,q′v为q′的斜对称矩阵,np为p点的法线,其中,参考帧点是作为参考的扫描周期中的激光点的测量位置信息,当前帧点是当前扫描周期中的相应激光点的测量位置信息。
48、在一些实施例中,数据确定单元中,上述根据各雷达数据分别对应的数据采集时间和各端点雷达数据对应的雷达位姿数据,确定各中间雷达数据分别对应的雷达位姿数据,包括:针对各中间雷达数据,将相应中间雷达数据对应的数据采集时间和各端点雷达数据对应的雷达位姿数据,代入预先确定的位姿计算公式,得到相应中间雷达数据对应的雷达位姿数据;
49、其中,位姿计算公式,包括:
50、t1=t0*tcom
51、
52、其中,t1为中间雷达数据对应的雷达位姿数据,t0为扫描周期起点处的端点雷达数据对应的雷达位姿数据,te为扫描周期终点,ts为扫描周期起点,tc为扫描周期中的任一时间点,tp_e表示ts到te过程激光雷达产生的位姿变化,tcom表示ts到tc过程激光雷达产生的位姿变化。
53、在一些实施例中,参数确定单元包括第一确定模块和第二确定模块。
54、第一确定模块,用于根据传感器位姿数据集,生成位姿传感器在各个时刻的第一旋转轴信息,以及根据雷达位姿数据集,生成激光雷达在各个时刻的第二旋转轴信息;根据各第一旋转轴信息、各第二旋转轴信息和预先构建的旋转代价函数,确定目标旋转参数;
55、第二确定模块,用于根据传感器位姿数据集、雷达位姿数据集和目标旋转参数,确定目标平移参数。
56、在一些实施例中,旋转代价函数,包括:
57、
58、其中,f(rx)为旋转代价函数,rx为目标旋转参数,qx为rx的四元数形式,为qx的转置,n为雷达位姿数据集中雷达位姿数据的总个数,q(na_i)表示四元数左乘na_i的矩阵形式,w(nb_i)表示四元数右乘nb_i的矩阵形式,na_i为第i时刻的第一旋转轴信息,nb_i为第i时刻的第二旋转轴信息,qx的模长为1。
59、在一些实施例中,装置还包括时间校准单元,用于根据预先确定的校准参数,对激光雷达的第一时间坐标系和位姿传感器的第二时间坐标系进行时间校准。
60、在一些实施例中,装置还包括参数优化单元,用于根据预先构建的优化函数和预先确定的参数更新算法,对目标标定参数进行更新,得到满足预设优化条件的更新后参数,以及将目标标定参数切换为更新后参数。
61、在一些实施例中,优化函数包括:
62、
63、其中,g(xi-xj,2σ2i)为高斯函数,m为扫描周期的总个数,rx为目标旋转参数,tx为目标平移参数,rx与tx为待优化的参数,σ为先验标准差,i为单位矩阵,x′i与x′j为同一激光点在第i个和第j个扫描周期下的测量位置信息,xi为x′i对应时刻位姿传感器在目标设备坐标系下的坐标,xj为x′j对应时刻位姿传感器在目标设备坐标系下的坐标,为与x′i对应时刻下的位姿传感器的传感器位姿数据,为与x′j对应时刻下的位姿传感器的传感器位姿数据。
64、第三方面,本技术实施例提供了一种电子设备,包括存储器、处理器以及存储在存储器中并可在电子设备上运行的计算机程序,处理器执行计算机程序时实现第一方面提供的设备标定方法的各步骤。
65、第四方面,本技术实施例提供了一种计算机可读存储介质,计算机可读存储介质存储有计算机程序,计算机程序被处理器执行时实现第一方面提供的设备标定方法的各步骤。
66、第五方面,本技术实施例提供了一种计算机程序产品,当计算机程序产品在电子设备上运行时,使得电子设备执行上述任一项设备标定方法。
67、本技术实施例与相关技术相比存在的有益效果是:通过对激光雷达所采集的雷达数据集进行分析,从而确定得到各雷达数据分别对应的雷达位姿数据,之后,通过对雷达位姿数据集和位姿传感器所采集的传感器位姿数据集进行分析,从而得到激光雷达与位姿传感器之间的目标标定参数,可以实现有效地对目标设备上的激光雷达和位姿传感器之间的参数进行参数标定。
68、可以理解的是,上述第二方面至第五方面的有益效果可以参见上述第一方面中的相关描述,在此不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!