一种基于三相平衡条件的霍尔传感器磁场位置信息检测方法
1.本发明属于高集成化高精度领域,具体涉及一种基于三相平衡条件的霍尔传感器磁场位置信息检测方法。
背景技术:
2.随着先进制造业的快速发展,现代精密、超高精密制造装备对高响应、高速度。高精密的多自由度工作台有迫切需求。制造设备通常需要精确的多自由度(dof)运动以及紧凑、轻质和高刚度结构。对于多自由度运动平台,迄今为止一直使用传统的堆叠、龙门和混合结构。然而,这些传统结构正达到极限,以满足快速响应和高精度运动的迫切需求。在这种背景下,具有多个电磁力直接驱动特点的多自由度工作台应运而生,它避开了传统多自由度工作台叠层驱动的思路,为多自由度工作台性能指标的进一步增强开辟了崭新的途径。直接驱动多自由度工作台划分为气浮多自由度工作台和磁浮多自由度工作台。相比于气浮方式,磁浮方式具有简单,表面无需精密加工、可实现非运动自由度的主动约束,易在真空环境中应用等优点。现有技术采用的是一种宏动磁浮六自由度工作台。该磁浮六自由度工作台由线圈阵列组成,通过给线圈通电流来产生磁场。而动子相对于定子的位置检测通常采用微距离高精度激光测距仪进行检测,但这种设备价格昂贵、安装使用要求高、测量范围有限,因此,需要一种新的技术方案以解决上述问题。目前,市场上使用成本较为低廉的霍尔传感器来检测磁场位置与信息。一般使用的是两相检测法,且只能检测一个方向的平动和微小角度的测量。
技术实现要素:
3.本发明提供一种基于三相平衡条件的霍尔传感器磁场位置信息检测方法,用以较低成本解决精准检测平面电机动子线圈磁场位置的问题,且使用三相信号检测提高了检测的精准度,有效的滤除了信号中的高次谐波。同时,采用两组霍尔传感器进行测量,可以同时输出x、y两个方向的位置信息。
4.本发明通过以下技术方案实现:
5.一种基于三相平衡条件的霍尔传感器磁场位置信息检测方法,所述检测方法包括以下步骤:
6.步骤1:组装实验仪器,并确定两组霍尔传感器的位置关系;
7.步骤2:x轴霍尔传感单元组5包括2个霍尔传感器,2个霍尔传感器的相位相差120
°
,利用三相平衡条件产生x轴三相信号;
8.步骤3:基于步骤2产生的x轴三相信号,使用三相至两相传感器变换将x轴三相信号转换为x轴两相信号;
9.步骤4:基于步骤3的x轴两相信号,对其使用反正切函数,来实现x轴磁场的位置信息;
10.步骤5:y轴霍尔传感单元组4中重复步骤2-4得到y轴磁场的位置信息。
11.一种基于三相平衡条件的霍尔传感器磁场位置信息检测方法,所述步骤1实验仪器包括永磁平面电机,所述永磁平面电机包括动子永磁阵列(2)和定子线圈阵列(1),定子线圈阵列包含4个驱动单元a、b、c、d,每个驱动单元均由三个线圈(3)组成,b驱动单元和c驱动单元产生x轴向水平推力,a驱动单元和d驱动单元产生y轴向水平推力。
12.一种基于三相平衡条件的霍尔传感器磁场位置信息检测方法,所述动子永磁阵列2外侧附有x轴霍尔传感单元组5和y轴霍尔传感单元组4,同时测量动子相对于磁场x方向和y方向的位置信息,且两组霍尔传感器的排列成正交关系。
13.一种基于三相平衡条件的霍尔传感器磁场位置信息检测方法,每组线性霍尔传感器由两个线性传感器组成,且以与动子的几何中性线为起点,沿线圈的排列方向间隔2/3极距排列。
14.一种基于三相平衡条件的霍尔传感器磁场位置信息检测方法,所述步骤2的x轴三相信号表示为:
15.va=vsinθ
[0016][0017][0018]
其中,vc,vb,va为三相信号,v为初始电压,θ为初始相位角。
[0019]
一种基于三相平衡条件的霍尔传感器磁场位置信息检测方法,所述步骤3的x轴三相至x轴二相的转变为:
[0020][0021][0022]
其中,v
α
,v
β
为三相转变后的两相信号。
[0023]
一种基于三相平衡条件的霍尔传感器磁场位置信息检测方法,所述步骤4由得到的x轴二相信号即可得到位置信息:
[0024][0025][0026]
其中,τ为极距。
[0027]
本发明的有益效果是:
[0028]
本发明采用的传感器成本低,测量范围不受行程限制,工作稳定可靠。
[0029]
本发明取代常用的激光测距仪对动子相对于定子的位置信息和磁场信息进行检测,安装使用方便,硬件成本低,测量范围不受行程限制,工作稳定可靠。
[0030]
本发明采用2组线性霍尔传感器正交排列同时测量x、y两个方向的磁场信息,且利
用三相测量法进行磁场信息的测量及解算,有效的消除了三次及其倍数谐波的误差,缩小了振幅和相位误差,测量精度高。
附图说明
[0031]
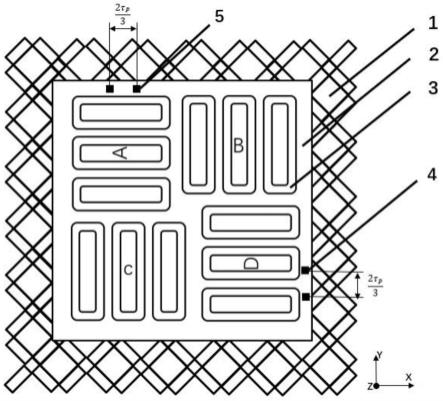
图1是本发明的位置示意图。
[0032]
图1中:1-定子永磁阵列;2-动子线圈阵列;3-线圈;4-测量x轴信息的线性霍尔传感器组;5-测量x轴向信息的线性霍尔传感器组;a、d:产生y轴向水平推力的驱动单元;b、c:产生x轴向水平推力的驱动单元。
[0033]
图2是本发明的方法流程图。
具体实施方式
[0034]
下面将结合本发明实施例中的附图对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0035]
图1中,5用来测量磁场的x向信息;4用来测量y向磁场信息;采用两组霍尔传感器同时测量x、y向的磁场位置信息,并通过三相分析法进行位置解算。在磁性位置传感器的应用方面,传统的两相系统中位置检测采用两个相隔90
°
的位置传感器。在传统三相系统中,三个电动位移120
°
的位置传感器用于解码移动器位置。霍尔效应传感器的适当安装位置提高了传感器输出的精度。因此,霍尔效应传感器之间的安装位置和适当距离可以提供有关直线电机中移动器位置的改进信息。所提出的位置检测方法使用两个电气分离120
°
的磁性传感器单元和三相平衡条件(va+vb+vc=0)产生三相信号。使用三相至两相传感器变换将三相信号转换为两相信号。直线电机的位置是通过在获得的两相信号上使用反正切函数来实现的。传感器输出电压信号的振幅调整为单位振幅,以最小化振幅误差。利用单位振幅信号进行三到二相变换,以减少谐波分量的三倍。这样得到的最终输出通过使用反正切函数转换为位置数据。与使用90
°
电角度分离传感器的传统系统相比,使用与传统两相法相同数量的传感器模块,该方法可提供更准确的位置信息。
[0036]
一种基于三相平衡条件的霍尔传感器磁场位置信息检测方法,所述检测方法包括以下步骤:
[0037]
步骤1:组装实验仪器,并确定两组霍尔传感器的位置关系;
[0038]
步骤2:x轴霍尔传感单元组5包括2个霍尔传感器,2个霍尔传感器的相位相差120
°
,利用三相平衡条件产生x轴三相信号;
[0039]
步骤3:基于步骤2产生的x轴三相信号,使用三相至两相传感器变换将x轴三相信号转换为x轴两相信号;
[0040]
步骤4:基于步骤3的x轴两相信号,对其使用反正切函数,来实现x轴磁场的位置信息;
[0041]
步骤5:y轴霍尔传感单元组4中重复步骤2-4得到y轴磁场的位置信息。
[0042]
一种基于三相平衡条件的霍尔传感器磁场位置信息检测方法,所述步骤1实验仪器包括永磁平面电机,所述永磁平面电机包括动子永磁阵列2和定子线圈阵列1,定子线圈
阵列包含4个驱动单元a、b、c、d,每个驱动单元均由三个线圈3组成,b驱动单元和c驱动单元产生x轴向水平推力,a驱动单元和d驱动单元产生y轴向水平推力。
[0043]
一种基于三相平衡条件的霍尔传感器磁场位置信息检测方法,所述动子永磁阵列2外侧附有x轴霍尔传感单元组5和y轴霍尔传感单元组4,同时测量动子相对于磁场x方向和y方向的位置信息,且两组霍尔传感器的排列成正交关系。
[0044]
一种基于三相平衡条件的霍尔传感器磁场位置信息检测方法,每组线性霍尔传感器由两个线性传感器组成,且以与动子的几何中性线为起点,沿线圈的排列方向间隔1/2极距等间距地排列。根据每个线性霍尔传感器组中的2个线性霍尔传感器所测量的电压大小,由三相测量法得出x向y向的位置信息。
[0045]
一种基于三相平衡条件的霍尔传感器磁场位置信息检测方法,所述步骤2的x轴三相信号表示为:
[0046]
va=vsinθ
[0047][0048][0049]
其中,vc,vb,va为生成的三相信号。
[0050]
一种基于三相平衡条件的霍尔传感器磁场位置信息检测方法,所述步骤3的x轴三相至x轴二相的转变为:
[0051][0052][0053]
其中,v
α
,v
β
为转换后的两相信号。
[0054]
一种基于三相平衡条件的霍尔传感器磁场位置信息检测方法,所述步骤4由得到的x轴二相信号即可得到位置信息:
[0055][0056][0057]
其中,τ为极距。
[0058]
由两个电隔离120
°
而非90
°
的传感单元组成,以产生三相系统的两相电压va和vb。为了获得第三个电压vc,应用三相平衡条件。振幅参考单位振幅。然后进行三相到两相转换,并使用反正切函数获得位置。由此可以获得比传统测量方法更小的振幅误差和相位误差,以及消除三次及其倍数的谐波误差。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1