具有冗余设计的极低法向耦合偏转机构及其控制方法
1.本发明属于光学精密指向机构技术领域,具体涉及一种具有冗余作动设计,可实现纯力矩驱动镜面偏转,具有极低法向耦合的偏转机构及其控制方法。
背景技术:
2.空间引力波探测对于人类认识和观测宇宙具有极高的价值,目前国际主流的空间引力波探测方法为卫星间激光干涉测量捕获,星间激光干涉相互对准精度达到纳弧度量级,超高精度的光束指向机构成为引力波探测的重要一环,由于装配、热变形、机械应力等引起的尺寸变化都将影响激光干涉仪输出的路径长度,在镜面偏转过程中不可避免的会产生镜面法向耦合,导致出射光路发生平移,引入额外的光程差,影响机构的指向精度,使得空间激光测量存在误差,因此具有低镜面法向耦合,可进行纯偏转运动的光束指向机构在引力波科学探测中具有重要意义。
技术实现要素:
3.为了解决上述现有技术存在的问题,本发明的目的在于提供一种具有冗余设计的极低法向耦合偏转机构及其控制方法,通过多个柔性铰链解耦与传力机构尺寸结构设计控制法向力的产生,实现纯力矩驱动,通过十字铰链增大法向刚度,减小扭转刚度,进而减小法向位移,实现镜面极低法向耦合;使用两个压电叠堆的冗余压电驱动设计,可实现三种工况下的输出,具备冗余及满足多种工况需求的优点,提高整体输出稳定性。
4.为达到上述目的,本发明所采用的技术方案如下:
5.具有冗余设计的极低法向耦合偏转机构,包括反射镜挠曲调整架1、反射镜2、传动杆3、差动杠杆4、菱形环5和压电叠堆6;反射镜挠曲调整架1为中部镂空的凸台结构,上下侧面中心孔洞内嵌十字铰链1-1,十字铰链1-1主体为正偶数边形凸台,反射镜挠曲调整架1中部镂空结构内布置有约束定子1-2,约束定子1-2为中部镂空的方形凸台,其端面与反射镜挠曲调整架1各相应端面平行,约束定子1-2上下端面与十字铰链1-1的正偶数边形凸台中心相连,反射镜2内嵌于约束定子1-2镂空处,约束定子1-2底面与镜托3-1螺纹固接,同时反射镜2也与镜托3-1端面接触,镜托3-1为传动杆3前端面方形凸台,四角加工有螺纹孔,镜托3-1后为梯形等刚度梁3-2部分,等刚度梁3-2后为扁平直梁3-3部分,一体化设计的等刚度梁3-2和扁平直梁3-3组成传动杆3;扁平直梁3-3侧面与双轴解耦铰链4-1端面通过螺栓固接,双轴解耦铰链4-1位于差动杠杆4中部,差动杠杆4两端分别为单轴解耦铰链4-2和x型铰链4-3,柔性的单轴解耦铰链4-2和x型铰链4-3端面均与菱形环5短轴端面固接,菱形环5长轴方向内嵌有压电叠堆6。
6.菱形环5具有位移放大功能,长短轴长度比越大,短轴输出位移放大倍数越大;菱形环5为压电叠堆6提供约束,在安装压电叠堆6前为菱形环5预先施加压应力,避免压电叠堆6受到拉应力损坏;菱形环5具有断电锁止作用,在停止电压输入下依然能保持压电叠堆6变形状态,进而使得反射镜2摆角维持不变,减少能量损耗。
7.梁端部边缘受应力最大,将传动杆3传力部分的等刚度梁3-2设计为梯形,等刚度梁中间部分采用镂空设计,在满足边缘刚度需求下减轻重量。
8.x型铰链4-3旋转中心到差动杠杆4距离为单轴解耦铰链4-2旋转中心到差动杠杆4距离一半,差动杠杆4两端受力相同,菱形环5包括主作动菱形环5-1和辅作动菱形环5-2,菱形环5采用冗余式作动设计,主作动菱形环5-1与辅作动菱形环5-2左右推拉对称减小耦合;与单轴解耦铰链4-2固接为主作动菱形环5-1,与x型铰链4-3固接为辅作动菱形环5-2。
9.通过多个柔性铰链解耦与传力机构尺寸结构设计控制法向力的产生,实现纯力矩驱动,具体为:通过单轴解耦铰链4-2与x型铰链4-3分别将主作动菱形环5-1和辅作动菱形环5-2输出的短轴方向压电直线作用力传递到差动杠杆4,柔性铰链具有减小非短轴方向作用力作用;通过双轴解耦铰链4-1传递给垂直于扁平直梁3-3侧面作用力,双轴解耦铰链4-1具有减小非垂直端面方向作用力及扭转作用;对传动杆3受理端面进行设计,使得反射镜2法线落在扁平直梁3-3受力端面的扩展平面上,传动杆3对反射镜2只产生力矩作用,进一步减小法向力的产生。
10.通过十字铰链1-1与约束定子1-2配合,减小反射镜2镜面法向位移,具体为:反射镜2内嵌于约束定子1-2以限制反射镜2平移运动;约束定子1-2与十字铰链1-1正偶数边形主体相连,十字铰链1-1含四条分支铰链,其中两条沿镜面法向,另外两条沿传动杆3受力方向,在反射镜2受到法向力作用时,十字铰链1-1能提供大的法向刚度,进一步减小法向位移;十字铰链1-1旋转中心落在反射镜2镜面的扩展平面上,十字铰链1-1旋转中心与反射镜2中心法向高度一致。
11.该偏转机构的作动方法为:向压电叠堆6施加电压,压电叠堆6沿着菱形环5长轴方向产生变形,输出长轴方向位移,菱形环5长轴方向受到拉伸或压缩作用,相应的短轴方向受到压缩或拉伸作用,端面输出沿短轴方向位移;菱形环5通过相连的柔性铰链驱动差动杠杆4一端产生相同大小位移,带动差动杠杆4中部产生方向一致的位移,并通过双轴解耦铰链4-1传递,对与扁平直梁3-3固接端面施加垂直作用力,传动杆3受力产生单轴平面偏转运动,偏转轴垂直于作用力方向,带动约束定子1-2与反射镜2产生偏转大小与方向一致的单轴平面偏转运动,将压电直线驱动转化为单轴偏转运动,实现反射镜2的偏转调节。
12.所述的具有冗余设计的极低法向耦合偏转机构的控制方法,具有三种压电驱动位移传动模式,通过对不同压电叠堆6的电压控制可满足三种工况下位移需求,位移传动模式一为:同时为主作动菱形环5-1与辅作动菱形环5-2内压电叠堆6施加相同的电压,差动杠杆4两端将进行相同的直线运动,带动中部的双轴解耦铰链4-1产生相同位移,在该位移传动模式下输出位移大,反射镜2镜面产生的相应偏转幅度大,满足大行程工况需求;
13.位移传动模式二为:向主作动菱形环5-1内压电叠堆6施加电压,辅作动菱形环5-2不施加电压,主作动菱形环5-1输出短轴方向位移,根据杠杆原理,差动杠杆4中点输出位移为主作动菱形环5-1的一半,差动杠杆4另一端受到辅作动菱形环5-2固定约束,作为杠杆支点不产生位移,该位移传动模式下只需向主作动菱形环5-1的压电叠堆6施加电压,以满足正常工况需求。
14.位移传动模式三为:在主作动菱形环5-1故障情况下,或需要高精度偏转下,向辅作动菱形环5-2内压电叠堆6施加电压,辅作动菱形环5-2输出短轴方向位移,差动杠杆4中点输出位移为辅作动菱形环5-2的一半,差动杠杆4另一端受到主作动菱形环5-1固定约束,
作为杠杆支点不产生位移,确保在主作动菱形环5-1输出位移受阻情况下整个机构工作正常,x型铰链4-3的转动中心到辅作动菱形环5-2距离,为单轴解耦铰链4-2到主作动菱形环5-1距离的一半,使得位移传动模式三的运动范围为位移传动模式二的一半,以满足高偏转精度工况需求。
15.与现有技术相比,本发明具有以下优点:
16.1、通过多个柔性铰链解耦与传力机构尺寸结构设计控制法向力的产生,实现纯力矩驱动。
17.2、通过铰链提供法向刚度,设计铰链与镜面共旋转中心,减小镜面法向位移。
18.3、具有三种压电驱动位移传动模式,通过对不同压电叠堆的电压控制可满足三种工况下位移需求。
19.4、本发明结构紧凑,通过位移放大机构与传动转换,将直线驱动转为大幅度的单轴偏转运动。
附图说明
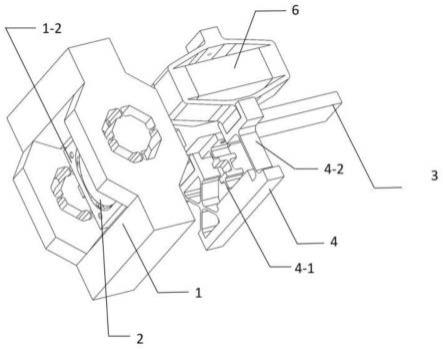
20.图1a与图1b为本发明不同方向的侧视图。
21.图2a与图2b为本发明剖视图。
22.图3a、图3b与图3c分别为本发明三种压电驱动模式示意图。
具体实施方式
23.下面结合附图和具体实施方式对本发明作进一步详细说明。
24.如图1a、图1b、图2a和图2b所示,本发明为一种具有冗余设计的极低法向耦合偏转机构,包括反射镜挠曲调整架1、反射镜2、传动杆3、差动杠杆4、菱形环5和压电叠堆6;反射镜挠曲调整架1为中部镂空的凸台结构,上下侧面中心孔洞内嵌十字铰链1-1,十字铰链1-1主体为正偶数边形凸台,采用正偶数边形凸台的优点是使得反射镜挠曲调整架1整体为对称结构,旋转中心与几何中心重合,本实施例为正八边形凸台,反射镜挠曲调整架(1)中部镂空结构内布置有约束定子1-2,约束定子1-2为中部镂空的方形凸台,其端面与反射镜挠曲调整架1各相应端面平行,约束定子1-2上下端面与十字铰链1-1的正八边形凸台中心相连,反射镜2内嵌于约束定子1-2镂空处,约束定子1-2底面与镜托3-1螺纹固接,同时反射镜2也与镜托3-1端面接触,镜托3-1为传动杆3前端面方形凸台,四角加工有螺纹孔,镜托3-1后为梯形等刚度梁3-2部分,等刚度梁3-2后为扁平直梁(3-3)部分,一体化设计的等刚度梁3-2和扁平直梁3-3组成传动杆3;扁平直梁3-3侧面与双轴解耦铰链4-1端面通过螺栓固接,双轴解耦铰链4-1位于差动杠杆4中部,差动杠杆4两端分别为柔性的单轴解耦铰链4-2和x型铰链4-3,两柔性铰链端面均与一菱形环5短轴端面固接,菱形环5长轴方向内嵌有压电叠堆6。
25.作为本发明的优选实施方式,所述的具有冗余设计的极低法向耦合偏转机构,菱形环5具有位移放大功能,长短轴长度比越大,短轴输出位移放大倍数越大;菱形环5为压电叠堆6提供约束,在安装压电叠堆6前为菱形环5预先施加压应力,避免压电叠堆6受到拉应力损坏;菱形环5具有断电锁止作用,在停止电压输入下依然能保持压电叠堆6变形状态,进而使得反射镜2摆角维持不变,减少能量损耗。
26.作为本发明的优选实施方式,所述的具有冗余设计的极低法向耦合偏转机构,梁端部边缘受应力最大,将传动杆3传力部分设计为梯形的等刚度梁3-2,等刚度梁中间部分采用镂空设计,在满足边缘刚度需求下可减轻重量。
27.作为本发明的优选实施方式,所述的具有冗余设计的极低法向耦合偏转机构,x型铰链4-3旋转中心到差动杠杆4距离为单轴解耦铰链4-2旋转中心到差动杠杆4距离一半,差动杠杆4两端受力相同,菱形环5包括主作动菱形环5-1和辅作动菱形环5-2,菱形环5采用冗余式作动设计,主作动菱形环5-1与辅作动菱形环5-2左右推拉对称减小耦合;与单轴解耦铰链4-2固接为主作动菱形环5-1,与x型铰链4-3固接为辅作动菱形环5-2。
28.作为本发明的优选实施方式,所述的具有冗余设计的极低法向耦合偏转机构,通过多个柔性铰链解耦与传力机构尺寸结构设计控制法向力的产生,实现纯力矩驱动:通过单轴解耦铰链4-2与x型铰链4-3分别将主作动菱形环5-1和辅作动菱形环5-2输出的短轴方向压电直线作用力传递到差动杠杆4,柔性铰链具有减小非短轴方向作用力作用;通过双轴解耦铰链4-1传递给垂直于扁平直梁3-3侧面作用力,双轴解耦铰链4-1具有减小非垂直端面方向作用力及扭转作用;对传动杆3受理端面进行设计,使得反射镜2法线落在扁平直梁3-3受力端面的扩展平面上,传动杆3对反射镜2只产生力矩作用,进一步减小法向力的产生。
29.作为本发明的优选实施方式,所述的具有冗余设计的极低法向耦合偏转机构,通过十字铰链1-1与约束定子1-2配合,减小反射镜镜面法向位移:反射镜2内嵌于约束定子1-2以限制反射镜2平移运动;约束定子1-2与十字铰链1-1正八边形主体相连,十字铰链1-1含四条分支铰链,其中两条沿镜面法向,另外两条沿传动杆3受力方向,在反射镜2受到法向力作用时,十字铰链1-1能提供大的法向刚度,进一步减小法向位移;十字铰链1-1旋转中心落在反射镜2镜面的扩展平面上,十字铰链1-1旋转中心与反射镜2中心法向高度一致,这样,避免出射光路发生平移引入光程差,确保机构的高指向精度。
30.所述的具有冗余设计的极低法向耦合偏转机构,其作动方法为:向压电叠堆6施加电压,压电叠堆6沿着菱形环5长轴方向产生变形,输出长轴方向位移,菱形环5长轴方向受到拉伸压缩作用,相应的短轴方向受到压缩(拉伸)作用,端面输出沿短轴方向位移;菱形环5通过相连的柔性铰链驱动差动杠杆4一端产生相同大小位移,带动差动杠杆4中部产生方向一致的位移,并通过双轴解耦铰链4-1传递,对与扁平直梁3-3固接端面施加垂直作用力,传动杆3受力产生单轴平面偏转运动,偏转轴垂直于作用力方向,带动约束定子1-2与反射镜2产生偏转大小与方向一致的单轴平面偏转运动,将压电直线驱动转化为单轴偏转运动,实现反射镜2的偏转调节。
31.如图3a、图3b及图3c所示,所述的具有冗余设计的极低法向耦合偏转机构的控制方法,具有三种压电驱动位移传动模式,通过对不同压电叠堆6的电压控制可满足三种工况下位移需求。
32.位移传动模式一为,同时为主作动菱形环5-1与辅作动菱形环5-2内压电叠堆6施加相同的电压,差动杠杆4两端将进行相同的直线运动,带动中部的双轴解耦铰链4-1产生相同位移,在该位移传动模式下输出位移大,反射镜镜面产生的相应偏转幅度大,可满足大行程工况需求。
33.所述的具有冗余设计的极低法向耦合偏转机构及其控制方法,位移传动模式二
为,向主作动菱形环5-1内压电叠堆6施加电压,辅作动菱形环5-2不施加电压,主作动菱形环5-1输出短轴方向位移,根据杠杆原理,差动杠杆4中点输出位移为主作动菱形环5-1的一半,差动杠杆4另一端受到辅作动菱形环5-2固定约束,作为杠杆支点不产生位移,该位移传动模式下只需向主作动菱形环5-1的压电叠堆6施加电压,以满足正常工况需求。
34.所述的具有冗余设计的极低法向耦合偏转机构及其控制方法,位移传动模式三为,在主作动菱形环5-1故障情况下,或需要高精度偏转下,向辅作动菱形环5-2内压电叠堆6施加电压,辅作动菱形环5-2输出短轴方向位移,差动杠杆4中点输出位移为辅作动菱形环5-2的一半,差动杠杆4另一端受到主作动菱形环5-1固定约束,作为杠杆支点不产生位移,确保在主作动菱形环5-1输出位移受阻情况下整个机构工作正常,x型铰链4-3的转动中心到辅作动菱形环5-2距离,为单轴解耦铰链4-2到主作动菱形环5-1距离的一半,使得位移传动模式三的运动范围为位移传动模式二的一半,可满足高偏转精度工况需求。
35.本发明将压电叠堆的直线驱动转化为纯力矩驱动控制镜面偏转,通过多个柔性铰链解耦减小法向力的产生,通过十字铰链增大法向刚度,减小扭转刚度,进而减小法向位移,实现镜面极低法向耦合;使用两个压电叠堆的冗余压电驱动设计,实现三种压电驱动位移传动模式,具备冗余,满足多种工况需求的优点,提高整体输出稳定性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1