一种海上风电桩基海缆入泥角多源融合巡检方法与流程
1.本发明涉及海上风电领域,尤其涉及一种海上风电桩基海缆入泥角多源融合巡检方法。
背景技术:
2.在海上风电运维工作中,风机基础结构及海缆接入端的水下状况检测工作,事关海上风机的基础安全,加强对其的检测十分重要。几乎每台海上风电风机桩基都有出和入两根集电海缆,一个规模海风场正常50台以上风机,升压站一般配置是12回路,有12根集电海缆输入,升压站还有(比如)220kv高压主海缆2两回路,总数量达120根海缆入泥角,任何一个都不能出故障,特别是220kv高压主海缆,会影响整个风场发电输出。海上风电水下设施一旦出现故障,从查证到维修、更换,需要至少一个月的周期。
3.在现有的设计方案中,通常采用桩基冲刷扫测、海缆扫测埋深,或人工进行巡检,没有更进一步的细节检测融合手段,也就是只能部分扫测运维,不能全面覆盖巡检,导致巡检结果的准确性有待提高,进而无法给出桩基维护的针对性策略。
4.因此,现有技术还有待于改进和发展。
技术实现要素:
5.鉴于上述现有技术的不足,本发明的目的在于提供一种海上风电桩基海缆入泥角多源融合巡检方法,旨在解决现有技术中桩基海缆入泥角的巡检繁琐且巡检结果准确性有待提高的问题。
6.本发明的技术方案如下:
7.本发明提供一种海上风电桩基海缆入泥角多源融合巡检方法,其中,所述巡检方法应用于巡检系统,所述巡检系统包括船体和机器人,所述机器人与所述船体电连接;
8.所述船体上设有侧扫声呐和定位系统,所述机器人包括前视声呐和摄像头,所述前视声呐的精度高于所述侧扫声呐的精度;
9.所述巡检方法包括:
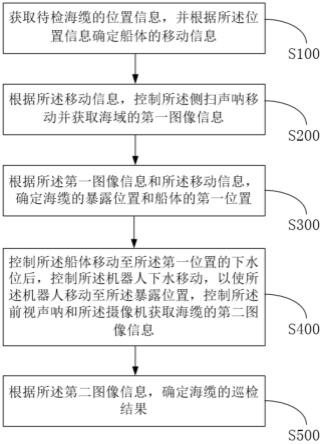
10.获取待检海缆的位置信息,并根据所述位置信息确定船体的移动信息;
11.根据所述移动信息,控制所述侧扫声呐移动并获取海域的第一图像信息;
12.根据所述第一图像信息和所述移动信息,确定海缆的暴露位置和船体的第一位置;
13.控制所述船体移动至所述第一位置的下水位后,控制所述机器人下水移动,以使所述机器人移动至所述暴露位置,控制所述前视声呐和所述摄像头获取海缆的第二图像信息;
14.根据所述第二图像信息,确定海缆的巡检结果。
15.在一种实施方式中,所述位置信息包括海缆的掩埋位置和桩基的安装位置,所述移动信息包括所述移动路线和移动速度;
16.所述获取待检海缆的位置信息,并根据所述位置信息确定船体的移动信息,包括:
17.获取海面信息和海水对桩基的水流冲刷信息;
18.根据所述水流冲刷信息、所述掩埋位置和所述安装位置,确定所述移动路线,并根据所述海面信息和所述掩埋位置,确定所述移动速度。
19.在一种实施方式中,所述移动路线包括船体的运动轨迹以及在运动轨迹上任一位置的定位;
20.所述根据所述第一图像信息和所述移动信息,确定海缆的暴露位置和船体的第一位置,包括:
21.对所述第一图像信息进行处理,得到海缆的目标状态和目标位置;
22.当所述目标状态为裸露状态时,根据所述目标位置将船体在运动轨迹对应的定位作为所述第一位置,并将在所述第一位置时侧扫声呐的采集范围作为所述暴露位置。
23.在一种实施方式中,所述暴露位置包括第一视角位置和第二视角位置,所述第二图像信息包括第一声学图像、第一光学图像、第二声学图像和第二光学图像;
24.所述控制所述船体移动至所述第一位置的下水位后,控制所述机器人下水移动,以使所述机器人移动至所述暴露位置,控制所述前视声呐和所述摄像头获取海缆的第二图像信息,包括:
25.控制所述船体向所述第一位置下水位移动,以使所述船体的当前位置与所述第一位置的距离在预设距离以上,将船体的当前位置作为机器人的下水位置;
26.控制所述机器人移动至所述第一视角位置,并控制所述前视声呐得到第一声学图像,控制所述摄像头得到第一光学图像;
27.控制所述机器人移动至所述第二视角位置,并控制所述前视声呐得到第二声学图像,控制所述摄像头得到第二光学图像。
28.在一种实施方式中,所述控制所述机器人移动至所述第一视角位置,并控制所述前视声呐得到第一声学图像,控制所述摄像头得到第一光学图像,包括:
29.根据所述下水位置和所述水流冲刷信息确定潜水路径;
30.根据所述潜水路径,控制所述机器人移至所述暴露位置中;
31.控制所述前视声呐获取的初始声学图像以及所述摄像头获取的初始光学图像;
32.根据所述初始声学图像和所述初始光学图像,控制所述机器人向靠近海缆裸露状态的方向移动,以使机器人当前位置下所述前视声呐获取目标声学图像和摄像头获取的目标光学图像均正对裸露状态的海缆,且位于清晰图像距离内,将所述机器人当前位置作为第一视角位置,所述目标声学图像作为所述第一声学图像,所述目标光学图像作为所述第一光学图像。
33.在一种实施方式中,所述第二图像信息还包括第三声学图像和第三光学图像;所述巡检方法还包括:
34.控制所述机器人移动至所述第三视角位置,并控制所述前视声呐得到第三声学图像,控制所述摄像头得到第三光学图像。
35.在一种实施方式中,所述巡检结果包括海缆的暴露数据;
36.所述根据所述第二图像信息,确定海缆的巡检结果,包括:
37.根据所述第一声学图像、第一光学图像、第二声学图像和第二光学图像,确定海缆
的暴露数据。
38.在一种实施方式中,所述海面信息包括风向、风速、海浪方向和海浪大小;
39.所述控制所述船体向所述第一位置下水位移动,以使所述船体的当前位置与所述第一位置的距离在预设距离以上,将船体的当前位置作为机器人的下水位置之后,还包括:
40.根据所述风向、风速、海浪方向和海浪大小,控制船体与桩基相对位置处于预设阈值范围内。
41.在一种实施方式中,所述机器人包括:
42.壳体,所述前视声呐和所述摄像头均设置于所述壳体,所述前视声呐与所述摄像头相对设置;
43.上浮块,设置于所述壳体上端;
44.侧浮块,设置于所述壳体侧端;
45.推进器,设置于所述壳体;
46.控制器,设置于所述壳体,与所述船体上的操作设备电连接;
47.照明灯,设置于所述壳体,所述照明灯、所述前视声呐以及所述摄像头朝向同一侧。
48.在一种实施方式中,所述第一视角位置为所述前视声呐和摄像头俯视海缆的角度位置,所述第二视角位置为所述前视声呐和摄像头正视海缆的角度位置;
49.所述控制所述机器人移动至所述第一视角位置,并控制所述前视声呐得到第一声学图像,控制所述摄像头得到第一光学图像,还包括:
50.启动所述推进器、上浮块和侧浮块,以使前视声呐和摄像头悬停在俯视海缆的角度位置;
51.所述控制所述机器人移动至所述第二视角位置,并控制所述前视声呐得到第二声学图像,控制所述摄像头得到第二光学图像,还包括:
52.启动所述推进器、上浮块和侧浮块,以使前视声呐和摄像头悬停在正视海缆的角度位置。
53.有益效果:本发明提供一种海上风电桩基海缆入泥角多源融合巡检方法,所述巡检方法应用于巡检系统,所述巡检系统包括船体和机器人,所述机器人与所述船体电连接;所述船体上设有侧扫声呐和定位系统,所述机器人包括前视声呐和摄像头,所述前视声呐的精度高于所述侧扫声呐的精度。本发明通过船体带着机器人同步在海上行驶,通过在船体上设置侧扫声呐,从而针对风机桩周边进行初步巡检,待初步巡检确定海缆的暴露位置后,通过机器人进入海底进行精确检查,确定巡检结果,从而提高巡检效率和巡检结果的准确性。
附图说明
54.图1为本发明的海上风电桩基海缆入泥角多源融合巡检方法的流程图;
55.图2为本发明的海上风电桩基海缆入泥角多源融合巡检系统的立体图;
56.图3为本发明的巡检系统的正视图;
57.图4为本发明的图3中a-a的剖面图;
58.图5为本发明的侧扫声呐位于上水位和下水位的示意图;
59.图6为本发明实施例中的第一图像信息的示意图;
60.图7为本发明实施例中初始声学图像的示意图;
61.图8为本发明实施例中介于初始声学图像和目标声学图像中的示意图;
62.图9为本发明实施例中目标声学图像的示意图。
63.附图标记说明:
64.10-壳体;11-前视声呐;12-摄像头;13-上浮块;14-侧浮块;15-推进器;16-控制器;17-照明灯;18-电源;19-三维扫描仪。
具体实施方式
65.本发明提供一种海上风电桩基海缆入泥角多源融合巡检方法,为使本发明的目的、技术方案及效果更加清楚、明确,以下对本发明进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
66.需说明的是,当部件被称为“固定于”或“设置于”另一个部件,它可以直接在另一个部件上或者间接在该另一个部件上。当一个部件被称为是“连接于”另一个部件,它可以是直接连接到另一个部件或者间接连接至该另一个部件上。
67.还需说明的是,本发明实施例的附图中相同或相似的标号对应相同或相似的部件;在本发明的描述中,需要理解的是,若有术语“上”、“下”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此,附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
68.在海上风电运维工作中,风机基础结构及海缆接入端的水下状况检测工作,事关海上风机的基础安全,加强对其的检测十分重要。目前还没有一套完整的海上风电水下设施运维巡检方法。现有普遍都是桩基冲刷扫测、海缆扫测埋深,没有更进一步的细节检测融合手段。
69.针对海上风电发展中水下操作的各种问题,为满足更加严苛的现场需求,采用水下机器人进行风机基础冲刷情况、海缆接入端设备情况监测,不仅节约人工成本,还能有效解决人工操作受限及人员安全风险等问题,能够更全面、更细节,给运维提供详细的数据资料,提前预防,减小经济损失,本发明的巡检方法,配置和工作简洁,总费用低,从而起到有效巡检的作用。
70.如图2-图4所示,本发明的一种海上风电桩基海缆入泥角多源融合巡检系统,所述巡检系统包括船体(图中未示出)和机器人,所述机器人与所述船体电连接,也就是机器人通过电缆与船体进行连接;
71.所述船体上设有侧扫声呐和定位系统(即gps),所述机器人包括前视声呐11和摄像头12,所述前视声呐的精度高于所述侧扫声呐的精度。
72.需要说明的是,前视声呐11为高清二维多波束声呐,可以做更精确的裸露数据确认;侧扫声呐是侧扫声呐是通过向侧方发射声波来探知水体、海面、海底(包括上部地层)声学结构和物质性质的仪器设备,能得到连续的二维海底图像。
73.在一种实施例中,所述机器人包括:
74.壳体10,所述前视声呐11和所述摄像头12均设置于所述壳体10,所述前视声呐11与所述摄像头12相对设置;
75.上浮块13,设置于所述壳体10上端;
76.侧浮块14,设置于所述壳体10侧端;
77.推进器15,设置于所述壳体10;
78.控制器16,设置于所述壳体10,与所述船体上的操作设备电连接;
79.照明灯17,设置于所述壳体10,所述照明灯17、所述前视声呐11以及所述摄像头12朝向同一侧。
80.具体地,如图2或图3所示,壳体10包括底板和侧板,摄像头12设置在壳体10上,摄像头12上端连接有前视声呐11,两个上浮块13设置在摄像头12的两侧,且两个侧浮块14分别设置在两个上浮块13背离摄像头12的一侧,侧浮块14设有通孔,四个推进器15通过通孔设置在壳体10上,壳体上设有控制舱和电源舱,控制器16设置在控制舱内(位于壳体后侧),电源18位于电源舱内(位于壳体前侧),壳体10两侧设有照明灯17。
81.在其他实施例中,壳体上还可设有三维扫描仪19(水下激光扫描仪)进行三维扫描,从而确定被扫描结果的形状、大小。
82.基于上述所述的海上风电桩基海缆入泥角多源融合巡检系统,本发明还提供了一种海上风电桩基海缆入泥角多源融合巡检方法,如图1所示,所述巡检方法包括以下步骤:
83.步骤s100、获取待检海缆的位置信息,并根据所述位置信息确定船体的移动信息。
84.在一种实现方式中,所述位置信息包括海缆的掩埋位置和桩基的安装位置,所述移动信息包括所述移动路线和移动速度,所述步骤s100具体包括:
85.步骤s110、获取海面信息和海水对桩基的水流冲刷信息;
86.步骤s120、根据所述水流冲刷信息、所述掩埋位置和所述安装位置,确定所述移动路线,并根据所述海面信息和所述掩埋位置,确定所述移动速度。
87.具体地,在桩基安装完成和海缆掩埋后,能够根据安装掩埋时预设的装置获取桩基安装位置和海缆掩埋位置,获取安装位置和掩埋位置对应的海面信息,并获取海水对桩基的水流冲刷信息;从而根据上述信息确定船体的移动路线和移动速度。需要注意,船体的船速越低,炮点密度越大,探测分辨率越高;固定安装的船速可较大,拖曳调查的船速较低(受制于拖缆强度和入水深度),深水拖曳的船速最低
88.进一步,所述海面信息包括风向、风速、海浪方向和海浪大小,水流冲刷信息包括海底水流方向和水流大小,所述移动路线包括船体的运动轨迹以及在运动轨迹上任一位置的定位(实际运动可通过gps进行确定)。
89.需要说明的是,由于机器人在水下移速小于船体移速,进而在对桩基海缆入泥角巡检时,首先采用船体带着机器人同步在海上行驶,通过在船体上设置侧扫声呐,从而针对风机桩周边进行初步巡检,待初步巡检表明许进一步检查时,通过机器人进入海底进行精确检查,确定巡检结果,从而提高巡检效率和巡检结果的准确性。
90.需要注意,如图5所示,m处的侧扫声呐正下方与其斜线之内的区域为采集盲区,n处为下水位的侧扫声呐所在位置,船体的运动轨迹需保证侧扫声呐采集到桩基和海缆的图像。
91.步骤s200、根据所述移动信息,控制所述侧扫声呐移动并获取海域的第一图像信
息。
92.具体地,通过船体在运动轨迹上以移动速度进行移动,从而使侧扫声呐采集获取海域中的第一图像信息,如图6所示,图6中的中线(竖直线)为表示船体轨迹位置线,长条线形(弯曲,图6右侧)为裸露海底的海缆。
93.步骤s300、根据所述第一图像信息和所述移动信息,确定海缆的暴露位置和船体的第一位置。
94.在一种实现方式中,所述步骤s300具体包括:
95.步骤s310、对所述第一图像信息进行处理,得到海缆的目标状态和目标位置。
96.具体地,可对第一图像信息形成的录屏进行处理,如人工判断或软件进行数据处理,从而初步确定海域中海缆的目标状态(暴露状态或非暴露状态)。
97.步骤s320、当所述目标状态为裸露状态时,根据所述目标位置将船体在运动轨迹对应的定位作为所述第一位置,并将在所述第一位置时侧扫声呐的采集范围作为所述暴露位置。
98.具体地,当判断第一图像信息含有长条线形的裸露海缆,将第一图像信息中该长条线形对应的船体定位(gps识别)作为第一位置,船体在第一位置时侧扫声呐采集海域中的区域作为暴露位置。
99.所述步骤s310之后还包括:
100.步骤s330、当所述目标状态为非裸露状态(包括掩埋状态)时,船体继续移动,从而继续对所述第一图像信息进行处理,直至判定所述目标状态为裸露状态,继续执行步骤s320;或
101.完成运动轨迹的巡检。
102.步骤s400、控制所述船体移动至所述第一位置的下水位后,控制所述机器人下水移动,以使所述机器人移动至所述暴露位置,控制所述前视声呐和所述摄像头获取海缆的第二图像信息。
103.在一些实现方式中,所述暴露位置包括第一视角位置和第二视角位置,所述第二图像信息包括第一声学图像、第一光学图像、第二声学图像和第二光学图像;所述步骤s400具体包括:
104.步骤s410、控制所述船体向所述第一位置下水位移动,以使所述船体的当前位置与所述第一位置的距离在预设距离以上,将船体的当前位置作为机器人的下水位置。
105.需要说明的是,由于在上水位释放机器人后,机器人在水流作用下极其容易与风机桩产生的涡流吸引,从而容易与桩基碰撞造成损伤,因此本发明在桩基下水位进行释放机器人,然后控制机器人在水下靠近桩基和海缆的暴露位置。
106.具体地,预设距离在20m至30m内,控制船体在第一位置(如图5左侧)向下水位移动并在水流带动下,使船体与船体的第一位置的间距超过预设距离,从而在船体的当前位置(即第二位置,如图5右侧)释放机器人,进而使机器人进入水中。
107.在一些实现方式中,所述步骤s410之后,还包括:
108.步骤s411、根据所述风向、风速、海浪方向和海浪大小,控制船体与桩基相对位置处于预设阈值范围内。
109.具体地,在释放机器人后,控制船体在步骤s410中的第二位置的周边稳定,预设阈
值范围可以设置为10m之内,从而船体在第二位置周边10m范围内,保证机器人进入水中的运行状态。
110.步骤s420、控制所述机器人移动至所述第一视角位置,并控制所述前视声呐得到第一声学图像,控制所述摄像头得到第一光学图像。
111.所述步骤s420具体包括:
112.步骤s421、根据所述下水位置和所述水流冲刷信息确定潜水路径;
113.步骤s422、根据所述潜水路径,控制所述机器人移至所述暴露位置中。
114.具体地,机器人在第二位置下水后,根据水流冲刷信息(海域中水流、水向和障碍物)确定潜水路径,进一步,潜水路径为弧线状,也就是从第二位置深入水中的过程中向侧面运动,以驶出水流急促区域,进而从侧面绕到桩基和海缆的暴露位置,节省能源且保证机器人行驶安全和准确。
115.步骤s423、控制所述前视声呐获取的初始声学图像以及所述摄像头获取的初始光学图像;
116.具体地,在进入暴露位置后,通过机器人上的前视声呐获取初始声学图像(如图7所示)以及摄像头获取的初始光学图像,进行机器人的初步判断。
117.步骤s424、根据所述初始声学图像和所述初始光学图像,控制所述机器人向靠近海缆裸露状态的方向移动,以使机器人当前位置下所述前视声呐获取目标声学图像(如图9所示)和摄像头获取的目标光学图像均正对裸露状态的海缆,且位于清晰图像距离内,将所述机器人当前位置作为第一视角位置,所述目标声学图像作为所述第一声学图像,所述目标光学图像作为所述第一光学图像。
118.具体地,继续控制机器人驶向靠近海缆裸露状态的位置移动,移动过程中多次获取中间声学图像和中间光学图像,当机器人位于清晰图像距离之内(进一步,可设置为5m内,或3m内,在此不做具体限定),且前视声呐和摄像头正对(如俯视、正视或侧视)海缆裸露状态的位置,从而确定第一视角位置、第一声学图像和第一光学图像。
119.在一种实现方式中,所述第一视角位置为所述前视声呐和摄像头俯视海缆的角度位置(即上面),所述第二视角位置为所述前视声呐和摄像头正视海缆的角度位置。
120.所述步骤s424还包括:
121.步骤s4241、启动所述推进器、上浮块和侧浮块,以使前视声呐和摄像头悬停在俯视海缆的角度位置。
122.具体地,在清晰图像距离内,机器人在悬停状态下获取声学图像和光学图像,从而保证图像的清晰度以及确定机器人的位置。
123.步骤s430、控制所述机器人移动至所述第二视角位置,并控制所述前视声呐得到第二声学图像,控制所述摄像头得到第二光学图像。
124.所述步骤s430具体包括:
125.步骤s431、根据所述第一视角位置,控制机器人以海缆裸露状态的位置为中心旋转预设角度;进一步,预设角度设置为90度,但不限于此,可以设置为100度、120度,保证成像图像清晰不被干扰。
126.所述步骤s431之后还包括:
127.步骤s432、启动所述推进器、上浮块和侧浮块,以使前视声呐和摄像头悬停在正视
海缆的角度位置(即正面),从而确定第二视角位置、第二声学图像和第二光学成像。
128.在一种实现方式中,所述第二图像信息还包括第三声学图像和第三光学图像;所述步骤s430之后,还包括步骤:
129.步骤s440、控制所述机器人移动至所述第三视角位置,并控制所述前视声呐得到第三声学图像,控制所述摄像头得到第三光学图像。
130.具体地,根据所述第二视角位置,控制机器人以海缆裸露状态的位置为中心旋转预设角度,并保持机器人悬停,得到第三视角位置、第三声学图像和第三光学成像。进一步,第三视角位置为海缆裸露状态的位置的侧面(位于正面和上面的一侧)。
131.通过海缆裸露扫测,然后二维成像、抵近观察,再摄像头拍照,这一套多源融合手段确认海缆入泥角裸露,挂渔网,被拉扯。达到安全运维预防的目的。
132.在一种实现方式中,第二图像信息包括三维扫描仪采集的三维图像;所述步骤s420之后,还包括:
133.控制所述机器人依次移动至所述第一视角位置和第二视角位置,并控制所述三维扫描仪三维图像。
134.步骤s500、根据所述第二图像信息,确定海缆的巡检结果。
135.在一种实现方式中,所述巡检结果包括海缆的暴露数据,所述步骤s500具体包括:
136.步骤s510、根据所述第一声学图像、第一光学图像、第二声学图像和第二光学图像,确定海缆的暴露数据。
137.在一种实现方式中,所述步骤s500还包括:
138.步骤s520、根据所述第一声学图像、第一光学图像、第二声学图像和第二光学图像、第三声学图像和第三光学成像,确定海缆的暴露数据。
139.具体地,海缆的暴露数据包括海缆上挂有渔网、海缆被拉扯等,从而根据多个图像(还可包括三维图像)确定海缆裸露状态的引起因素,以便后期定点维护,从而提高经济效益。
140.海缆的巡检结果还包括海缆的正常掩埋数据,从而对正常掩埋数据对应的海缆位置确定巡检合格。
141.本发明的巡检方法应用于巡检系统,通过机器人在风机桩基海缆入泥角扫测,俯视:扫测裸露和浅剖埋深,然后正对着从俯视到侧面,到正面,多角度检查;采用水下机器人搭载高清二维多波束声呐和摄像头进行光学成像,抵近二维成像观察,光学成像拍摄,多重数据对比融合,确定水下设施安全可靠。
142.综上所述,本发明提供一种海上风电桩基海缆入泥角多源融合巡检方法,所述巡检方法应用于巡检系统,所述巡检系统包括船体和机器人,所述机器人与所述船体电连接;所述船体上设有侧扫声呐和定位系统,所述机器人包括前视声呐和摄像头,所述前视声呐的精度高于所述侧扫声呐的精度。本发明通过船体带着机器人同步在海上行驶,通过在船体上设置侧扫声呐,从而针对风机桩周边进行初步巡检,待初步巡检确定海缆的暴露位置后,通过机器人进入海底进行精确检查,确定巡检结果,从而提高巡检效率和巡检结果的准确性
143.应当理解的是,本发明的应用不限于上述的举例,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,所有这些改进和变换都应属于本发明所附权利要求的保
护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1