一种多结构光投影的高度信息检测方法及检测装置与流程
m4|
…
|m1-mn|};其中dm=min{|mm-m1|,|mm-m2|,
…
,|mm-mm-1|,|mm-mm+1|,
…
,|mm-mn|},m≠1,且m≠n;其中dn=min{|mn-m1|,|mn-m2|,
…
|mn
–
mn-1|};
14.计算每个投影光源高度差别评分矩阵ds1~dsn,其中dsn=min{d1,d2,d3,d4
…
dn}/dn;
15.设定加权比例a、b,计算每个投影光源的高度质量评分矩阵s1~sn,其中sn=a*gsn+b*dsn,a+b=1;
16.设定高度质量阈值t;
17.取s1~sn中大于等于t的高度信息矩阵的平均值,以获取目标高度信息矩阵。
18.进一步的,所述波峰亮度比例矩阵的计算方式为,每个像素的波峰亮度比例=相移条纹亮度最大值/相移条纹亮度总和。
19.进一步的,所述gs1~gsn元素的取值范围为0-1.0。
20.进一步的,所述ds1~dsn元素的取值范围为0-1.0。
21.进一步的,所述s1~sn元素的取值范围为0-1.0。
22.进一步的,单个区域的多个高度信息矩阵m1~mn,只有一个有效高度信息,其余高度信息无效。
23.进一步的,还包括以下步骤:计算每个投影光源的波峰亮度比例矩阵g1~gn步骤之前,人工判断区域高度信息矩阵的有效性,若该区域高度信息矩阵无效,则增加该区域掩码设置以排除干扰。
24.进一步的,所述掩码设置步骤为设置另一个或多个矩形包裹区域,以将高度信息矩阵无效的区域包裹。
25.本发明还公开了一种多结构光投影的高度信息检测装置,包括:
26.相机,设于待测物的被测面上方;
27.多个投影光源,设于相机所在水平高度,沿相机周向间隔布设;
28.控制单元,控制多个投影光源的启闭;
29.输出单元,用于输出多个投影光源对应的高度信息矩阵及目标高度信息矩阵;
30.计算单元,用于计算每个投影光源的波峰评分矩阵和高度差别评分矩阵,以排除无效高度信息;
31.所述波峰评分矩阵为gs1~gsn,其中gsn=gn/max{g1,g2,g3,g4
…
gn},g1~gn为每个投影光源的波峰亮度比例矩阵;
32.所述高度差别评分矩阵为ds1~dsn,其中dsn=min{d1,d2,d3,d4
…
dn}/dn,d1~dn为每个投影光源的高度差别矩阵,其中d1=min{|m1-m2|,|m1-m3|,|m1-m4|
…
|m1-mn|};其中dm=min{|mm-m1|,|mm-m2|,
…
,|mm-mm-1|,|mm-mm+1|,
…
,|mm-mn|},m≠1,且m≠n;其中dn=min{|mn-m1|,|mn-m2|,
…
|mn
–
mn-1|}。
33.进一步的,所述投影光源为四个,其沿相机外周均匀间隔布设。
34.本发明的有益效果是,1)提出通过波峰评分矩阵可以去除遮挡以及受光弱的错误高度,通过高度评分矩阵可以去除多重反射及边沿错误高度,最终通过对两个评分加权求和,提出适用性、完整性和准确性都更好的多结构光投影的高度信息检测方法及装置;2)当加权评分受到投影遮挡、投影角度等复杂因素干扰时,同时高度信息正确的投影光源数量较少时,还可以添加掩码设置来排除干扰,因此保持高度的准确性。
附图说明
35.图1-1为现有技术中单目结构示意图。
36.图1-2为现有技术中直线条纹结构光示意图。
37.图1-3为现有技术中多幅直线条纹图像的灰度构成一个脉冲波形的示意图。
38.图1-4为现有技术中直线条纹投射到边沿内侧有亮度的示意图。
39.图1-5为现有技术中直线条纹投射到边沿外侧无亮度的示意图。
40.图1-6为现有技术中存在的拟合波峰位置产生偏差的示意图。
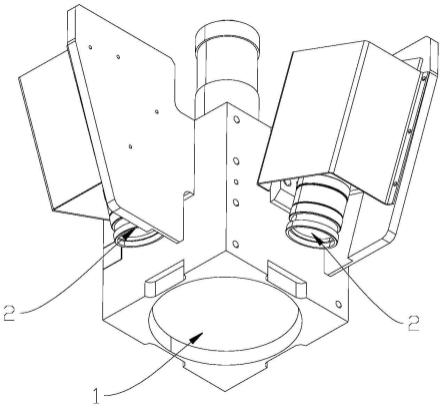
41.图2为本发明检测装置中相机和投影光源的立体结构示意图。
42.图3为本发明检测装置中相机和投影光源的仰视结构示意图。
43.图4为本发明中四个投影光源单独开启拍摄待测物的灰度图。
44.图5为本发明中四个投影光源单独开启拍摄待测物的高度矩阵示意图。
45.图6为仅使用波峰评分矩阵时将投影光源21高度去除的高度矩阵示意图。
46.图7为仅使用高度差别评分矩阵时将投影光源22高度去除的高度矩阵示意图。
47.图8为本发明检测方法中利用加权评分的高度矩阵示意图。
48.图9为本发明检测方法中利用加权评分和掩码方法的高度矩阵示意图。
具体实施方式
49.为了使本技术领域的人员更好的理解本发明方案,下面将结合本发明实施例中的附图,对发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
50.一种多结构光投影的高度信息检测装置,包括:
51.相机1,设置在待测物的被测面上方;
52.多个投影光源2,设置在相机1所在水平高度,沿相机1周向间隔布设;
53.控制单元,控制多个投影光源2的启闭;
54.输出单元,用于输出多个投影光源2对应的高度信息矩阵及目标高度信息矩阵;
55.计算单元,用于计算每个投影光源2的波峰评分矩阵和高度差别评分矩阵,从而排除无效高度信息。
56.一种多结构光投影的高度信息检测方法,依托上述的检测装置进行,包括以下步骤:
57.将待测物置于相机的视野范围内,依次启动多个投影光源,获得多个高度信息矩阵m1~mn;单个区域的多个高度信息矩阵m1~mn,只有一个有效高度信息,其余高度信息无效;
58.人工判断区域高度信息矩阵的有效性,若该区域高度信息矩阵无效,则增加该区域掩码设置以排除干扰;所述掩码设置步骤为设置另一个或多个矩形包裹区域,以将高度信息矩阵无效的区域包裹;
59.计算每个投影光源的波峰亮度比例矩阵g1~gn;上述波峰亮度比例矩阵的计算方式为,每个像素的波峰亮度比例=相移条纹亮度最大值/相移条纹亮度总和;
60.计算每个投影光源的波峰评分矩阵gs1~gsn,其中gsn=gn/max{g1,g2,g3,g4
…
gn};其中,gs1~gsn元素的取值范围为0-1.0;
61.计算每个投影光源的高度差别矩阵d1~dn,其中d1=min{|m1-m2|,|m1-m3|,|m1-m4|
…
|m1-mn|};其中dm=min{|mm-m1|,|mm-m2|,
…
,|mm-mm-1|,|mm-mm+1|,
…
,|mm-mn|},m≠1,且m≠n;其中dn=min{|mn-m1|,|mn-m2|,
…
|mn
–
mn-1|};
62.计算每个投影光源高度差别评分矩阵ds1~dsn,其中dsn=min{d1,d2,d3,d4
…
dn}/dn;其中,ds1~dsn元素的取值范围为0-1.0;
63.设定加权比例a、b,计算每个投影光源的高度质量评分矩阵s1~sn,其中sn=a*gsn+b*dsn,a+b=1;其中,s1~sn元素的取值范围为0-1.0;
64.设定高度质量阈值t;
65.取s1~sn中大于等于t的高度信息矩阵的平均值,以获取目标高度信息矩阵。
66.具体的,如图2、图3所示,以投影光源2的数量为四个,其沿着相机1的外周均匀间隔布设为例进行说明。
67.将待测物放置在相机1的视野范围内,依次启动四个投影光源2,获得四个高度信息矩阵m1~m4;
68.如图4所示,a、b、c、d分别为四个投影光源2(投影光源21、投影光源22、投影光源23、投影光源24)依次单独开启时拍摄的灰度图,图5为相对应的、四个投影光源2单独开启时拍摄的高度矩阵,其中,高度范围(-1,1)被表示为从蓝到绿到红过渡的颜色,而黑色表示无效高度,白色表示超出(-1,1)范围。
69.用三维坐标仪获取待测物的真实形状,与该事先获取的真实形状相比较,在图5中显示,开启投影光源21时,标记1处的高度与真实形状不符,标记1处为缺口,其真实形状高度应该在-0.5左右,但是获取的高度大于1,因此投影光源21在标记1处获取的高度存在错误;开启投影光源22时,标记2、标记3处的高度与真实形状不符,标记2处、标记3处真实形状高度均应该在0.58左右,但是标记2处获取的高度在1.35左右,标记3处获取的高度在0.78左右,因此投影光源22在标记2、标记3处获取的高度存在错误。
70.其中,标记1处在投影光源21和投影光源23的高度矩阵中都有效,而投影光源21在此处处于阴影中,因此其波峰评分低。具体是,投影光源21与投影光源23在此处的波峰亮度比例分别为:g1=0.15,g3=0.69,则波峰评分分别为:gs1=g1/g3=0.22,gs3=g3/g3=1(投影光源22和投影光源24高度无效,则gs2=0,gs4=0)。
71.投影光源21和投影光源23在此处的高度分别为:m1=1.117,m3=-0.495;则高度差别值分别为:d1=|m1-m3|=1.612,d3=|m3-m1|=1.612;则高度差别评分分别为:ds1=d1/d1=1,ds3=d1/d3=1(投影光源22和投影光源24高度无效,则ds2=0,ds4=0)。使用权重a=1,权重b=0,阈值t=0.61,其中阈值t=1/2(gs1+gs3),则s1=a*gs1+b*ds1=0.22,s3=a*gs3+b*ds3=1,即s1<t,s3>t,则在标记1处的高度矩阵取投影光源23获取的高度信息矩阵m3,因此计算目标高度矩阵时,仅使用波峰评分矩阵可以将投影光源21高度去除,其结果如图6。
72.与该事先获取的真实形状相比较,标记2处在所有投影中的高度矩阵中都有效,而投影光源22在此处受到多重反射的影响,因此产生错误高度,但其波峰评分却最大,所以无法使用波峰评分矩阵评估;不过,投影光源22高度与其他投影在此处高度相差很大,因此可以仅使用高度差别评分,将投影光源22高度去除。具体是,投影光源21~投影光源24在此处
的波峰亮度比例分别为:g1=0.32,g2=0.87,g3=0.29,g4=0.37,则波峰评分分别为:gs1=g1/g2=0.368,gs2=g2/g2=1,gs3=g3/g2=0.333,gs4=g4/g2=0.425。投影光源21~投影光源24在此点的高度分别为:m1=0.563,m2=1.351,m3=0.586,m4=0.584,则高度差别值分别为:d1=|m1-m4|=0.021,d2=|m2-m3|=0.765,d3=|m3-m4|=0.002,d4=|m4-m3|=0.002。则高度差别评分分别为:ds1=d3/d1=0.095,ds2=d3/d2=0.003,ds3=d3/d3=1,ds4=d3/d4=1。使用权重a=0,权重b=1,阈值t=0.52,其中阈值t=1/4(ds1+ds2+ds3+ds4),则s1=a*gs1+b*ds1=0.095,s2=a*gs2+b*ds2=0.003,s3=a*gs3+b*ds3=1,s4=a*gs4+b*ds4=1,即s1<t,s2<t,s3>t,s4>t,则在标记2处的高度矩阵取投影光源23、投影光源24获取的高度信息矩阵的平均值,其结果如图7;但是可以看到其无法合理评估标记1处,因为标记1处仅有标记2个投影高度有效,高度差别评分无法合理评估。
73.综上所述,计算目标高度矩阵时,如仅使用波峰评分矩阵可以获取标记1处正确的高度信息矩阵,但是标记2处获取的高度信息矩阵错误;如仅使用高度差别评分矩阵可以获取标记2处正确的高度信息矩阵,但是标记1处的高度信息矩阵错误。因此使用单个评分矩阵无法最好地得到目标高度矩阵,使用本发明提出的加权评分,具体是,使用权重a=0.5,权重b=0.5,则标记1处:
74.s11=0.5*gs1+0.5*ds1=0.5*0.22+0.5*1=0.61;
75.s12=0;
76.s13=0.5*gs3+0.5*ds3=0.5*1+0.5*1=1;
77.s14=0;
78.则标记2处:
79.s21=0.5*gs1+0.5*ds1=0.5*0.368+0.5*0.095=0.232;
80.s22=0.5*gs2+0.5*ds2=0.5*1+0.5*0.003=0.502;
81.s23=0.5*gs3+0.5*ds3=0.5*0.333+0.5*1=0.667;
82.s24=0.5*gs4+0.5*ds4=0.5*0.425+0.5*1=0.713;
83.阈值t=1/2(s11+s23),即t=0.64;
84.则,s11<t,s13>t,s21<t,s22<t,s23>t,s24>t;
85.则在标记1处的高度矩阵取投影光源23获取的高度信息矩阵m3,在标记2处的高度矩阵取投影光源23、投影光源24获取的高度信息矩阵的平均值。其能同时合理地评估标记1处和标记2处高度,其结果如图8。
86.但是可以看到标记3处仍无法合理评估,其采用了错误的投影光源22的高度,而投影光源24的高度是正确的;因标记3处为零件边沿,且边缘方向与投影光源22投射条纹平行,故条纹灰度会产生突变,从而其拟合波峰位置产生偏差,最终重构出像素的高度也有偏差(如图5,高出零件表面)。具体是,投影光源21和投影光源23在此处高度无效,投影光源22和投影光源24在此处的波峰亮度比例分别为:g2=0.38,g4=0.36,则波峰评分分别为:gs2=g2/g2=1,gs4=g4/g2=0.95。投影光源22和投影光源24在此点的高度分别为:m2=0.778,m4=0.589,则高度差别值分别为:d2=|m2-m3|=0.189,d4=|m4-m3|=0.189。则高度差别评分分别为:ds2=d2/d2=1,ds4=d2/d4=1。使用权重a=0.5,权重b=0.5,则标记3处:
87.s2=0.5*gs2+0.5*ds2=0.5*1+0.5*1=1;
88.s4=0.5*gs4+0.5*ds4=0.5*0.95+0.5*1=0.975;
89.因此s2》s4,对于任何阈值t,都无法排除投影光源22的高度而保留投影光源24的高度;故此类错误即无法使用前述所提评分方法评估,因此使用本发明提出的掩码方法,在标记3处设置一个掩码区域,具体是x=2240,y=1210,width=80,height=400,屏蔽投影2的高度,则标记3处的高度矩阵取投影光源24的高度信息矩阵m4,最终结果如图9,其高度矩阵与物体真实相符。
90.上述具体实施方式用来解释说明本发明,而不是对本发明进行限制,在本发明的精神和权利要求的保护范围内,对本发明作出的任何修改和改变,都落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1