一种实时可视化盾构机滚刀检测系统及方法与流程
1.本技术涉及盾构机设备安全监测领域,具体来说,涉及一种实时可视化盾构机滚刀检测系统。
背景技术:
2.盾构掘进过程中普遍会出现刀具磨损严重、非正常磨损以及机械设备损坏等现象,进而导致盾构机被迫停机、无法继续正常掘进。停机开舱、维修或更换坏损的刀具,是恢复盾构掘进而必须进行的操作。现有的滚刀检测装置,在复杂环境下盾构施工作业时,大多未考虑传感器与切削物、泥水的擦碰、侵蚀,影响检测数据的稳定性和准确性,容易造成技术人员未及时发现刀具的异常状况,对盾构机本体造成损伤。
3.中国专利cn106499400公开了一种无需对刀盘进行改动的滚刀状态检测方案,该专利通过电涡流、转速传感器模块实现滚刀状态的检测,由于盾构施工环境的复杂性,所以难以确保其传感器数据的准确性和时效性。
4.针对相关技术中的问题,目前尚未提出有效的解决方案。
技术实现要素:
5.本技术的目的在于提供一种实时可视化盾构机滚刀检测系统,以解决现有滚刀磨损检测装置被泥水等杂物影响稳定性和精度不高的问题。
6.第一方面,提供了一种实时可视化盾构机滚刀检测系统,包括:距离检测装置,所述距离检测装置包括测距传感器,测距传感器嵌设与滚刀座内壁,且测距传感器的头部罩设有第一透明保护盖;可视化装置,所述可视化装置包括微型摄像头,微型摄像头嵌设于滚刀座内壁,且微型摄像头的头部固定罩设有第二透明保护盖;污泥冲洗装置,所述污泥冲洗装置包括电动回转接头,电动回转接头固定嵌设于滚刀座内壁,电动回转接头内安装有清洗机座,清洗机座内固定有加压式喷嘴,加压式喷嘴通过水管与盾构机润滑装置的供水系统连接;数据收集装置,所述数据收集装置包括处理器和存储器,所述测距传感器、微型摄像头、电动回转接头和存储器均与处理器电性连接。
7.进一步的,所述测距传感器为红外测距传感器、激光测距传感器中的任意一种。
8.进一步的,所述滚刀座内壁开设有预留孔,且预留孔设置呈倒f型,预留孔的两个出口处分别固定有测距机座和摄像机座,微型摄像头固定于摄像机座内,距离检测传感器固定于测距机座内。
9.进一步的,所述测距传感器靠近第一透明保护盖的一端固定有第一阻隔玻璃板,第一阻隔玻璃板远离测距传感器的一侧固定有第一橡胶垫圈,第一透明保护盖与第一橡胶垫圈固定连接,第一阻隔玻璃板、第一防水隔板均通过c型卡簧与滚刀座固定连接。
10.进一步的,所述微型摄像头靠近第二透明保护盖的一端固定有第二阻隔玻璃板,第二阻隔玻璃板远离微型摄像头的一侧固定有第二橡胶垫圈,第二透明保护盖与第二橡胶垫圈固定连接,第二阻隔玻璃板、第二防水隔板均通过孔用卡簧与滚刀座固定连接。
11.进一步的,所述清洗机座上通过螺钉固定连接有照明装置。
12.进一步的,所述滚刀的左上、左下、右上和右下位置均设置有距离检测装置、可视化装置和污泥冲洗装置。
13.第二方面,提高了一种实时可视化盾构机滚刀检测方法,包括:
14.获取滚刀刀刃的宽度l、滚刀座的内宽d0和滚刀刀刃两侧测距传感器的测量值d
l
、dr;
15.基于l、d0、d
l
和dr计算滚刀刀刃的理论磨损量a;
16.统计一定时长内滚刀刀刃转至不同角度时滚刀刀刃两侧测距传感器的测量值d
l
、dr,并计算出滚刀刀刃两侧测距传感器的测量值的平均值d
1a
和d
ra
;
17.基于l、d0、d
l
、dr、d
1a
和d
ra
判断滚刀刀刃的磨损情况。
18.进一步的,所述理论磨损量a的计算公式为:a1=l-d
l-d
r-d0。
19.进一步的,所述滚刀刀刃的磨损情况的判断包括:
20.响应于|d
r-d
l
|《3mm,且|a|《1mm,则判断为滚刀刀刃处于正常磨损状态;
21.响应于d
la-d
ra
》2mm,则判断为滚刀刀刃左侧磨损严重;
22.响应于d
ra-d
la
》2mm,则判断为滚刀刀刃右侧磨损严重;
23.响应于d
l
=dr,则判断为需要停止作业;
24.响应于d
l
或dr的测量值大小骤降,则判断为第一透明保护盖被污泥遮挡,并启动污泥冲洗装置,以对第一透明保护盖进行冲洗。
25.与现有技术相比,本技术具有以下有益效果:本技术以安全、经济、可靠的方法,可清楚掌握盾构机滚刀实时的工作状况和刀刃的磨损数据,本技术采用测距传感器直接测量滚刀刀刃距测距传感器的距离,演算出滚刀刀刃的磨损量,并结合图像视觉,使滚刀工作状况更加具有可观性,相比于现有检测的方案,具有可视化、检测速度快和精度高的优点,并且能确保测距传感器的稳定性和完整性,此外,本技术考虑污泥水等因素对检测效果的影响,增添清洗装置和照明装置,提高滚刀工作磨损量的辨识度,检测效果更加准确。
附图说明
26.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
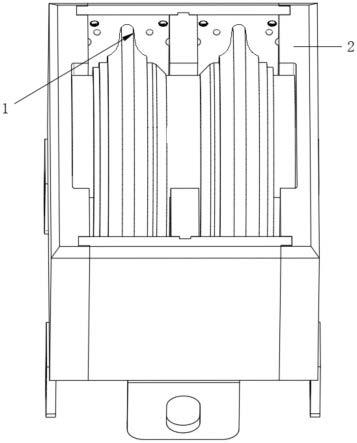
27.图1是根据本技术实施例的一种实时可视化盾构机滚刀检测系统的结构示意图;
28.图2是根据本技术实施例的一种实时可视化盾构机滚刀检测系统的主视图;
29.图3是图2中d处局视图;
30.图4是图3中a-a处剖视图;
31.图5是图3中b-b处剖视图;
32.图6是图3中c-c处剖视图;
33.图7是根据本技术实施例的一种实时可视化盾构机滚刀检测系统的电路框图。
34.附图标记:
35.1、滚刀;2、滚刀座;3、污泥冲洗装置;31、电动回转接头;32、清洗机座;33、加压式
喷嘴;4、可视化装置;41、微型摄像头;42、第二透明保护盖;5、距离检测装置;51、测距传感器;52、第一透明保护盖;6、数据收集装置;61、处理器;62、存储器;7、预留孔;8、测距机座;9、摄像机座;10、第一阻隔玻璃板;11、第一橡胶垫圈;12、c型卡簧;13、第二阻隔玻璃板;14、第二橡胶垫圈;15、孔用卡簧;16、照明装置;17、塑料软管。
具体实施方式
36.下面,结合附图以及具体实施方式,对发明做出进一步的描述:
37.实施例一:
38.请参阅图1-7,根据本技术实施例的一种实时可视化盾构机滚刀检测系统,包括:
39.距离检测装置5,所述距离检测装置5包括测距传感器51,测距传感器51嵌设与滚刀座2内壁,其中,测距传感器51以滚刀1的中心线为对称轴对称式分部,且测距传感器51的头部罩设有第一透明保护盖52;
40.具体的,所述测距传感器51为红外测距传感器51、激光测距传感器51中的任意一种,从而能够以非接触的方式利用测距传感器51检测其与刀刃之间的距离,其中,激光传感器包括光电元件和信号收集器一,光电元件用于发射激光信号,信号收集器一用于接收照射到待测物上反射的激光信号;红外检测装置包括发光源和信号收集二,信号收集器二用于接收照射到待测物上反射的红外信号。
41.可选的,测距传感器51靠近第一透明保护盖52的一端固定有第一阻隔玻璃板10,第一阻隔玻璃板10远离测距传感器51的一侧固定有第一橡胶垫圈11,第一透明保护盖52与第一橡胶垫圈11固定连接,第一阻隔玻璃板10、第一防水隔板均通过c型卡簧12与滚刀座2固定连接。
42.可视化装置4,所述可视化装置4包括微型摄像头41,微型摄像头41嵌设于滚刀座2内壁,且微型摄像头41的头部固定罩设有第二透明保护盖42;
43.具体的,所述滚刀座2内壁开设有预留孔7,且预留孔7设置呈倒f型,测距机座8和摄像机座9通过点焊工艺安装在滚刀座2上,预留孔7内除测距机座8和摄像机座9以外的区域均以塑料软管17填充覆盖,预留孔7的两个出口处分别固定有测距机座8和摄像机座9,微型摄像头41螺纹连接于摄像机座9内,距离检测传感器螺纹连接于测距机座8内,从而能够利用测距机座8和摄像机座9对距离检测传感器和微型摄像头41进行安装,并且微型摄像头41靠近第二透明保护盖42的一端固定有第二阻隔玻璃板13,第二阻隔玻璃板13远离微型摄像头41的一侧固定有第二橡胶垫圈14,第二透明保护盖42与第二橡胶垫圈14固定连接,第二阻隔玻璃板13、第二防水隔板均通过孔用卡簧15与滚刀座2固定连接。
44.可选地,第一透明保护盖52和第二透明保护盖42的材质均为玻璃钢,且呈透明状。
45.污泥冲洗装置3,所述污泥冲洗装置3包括电动回转接头31,电动回转接头31固定嵌设于滚刀座2内壁,电动回转接头31内安装有清洗机座32,清洗机座32内固定有加压式喷嘴33,加压式喷嘴33通过水管与盾构机润滑装置的供水系统连接,从而能够利用盾构润滑装置的供水系统向加压式喷嘴33提供水源;
46.数据收集装置6,所述数据收集装置6包括处理器61和存储器62,所述测距传感器51、微型摄像头41、电动回转接头31和存储器62均与处理器61电性连接。
47.在进一步的实施例中,所述清洗机座32上通过螺钉固定连接有照明装置16,其中,
照明装置16,通过固定在清洗基座上,起到辅助照明作用,使摄影图像清晰,便于技术人员诊断滚刀1工作状况。
48.在进一步的实施例中,如图1所示,所述滚刀1的左上、左下、右上和右下位置均设置有距离检测装置5、可视化装置4和污泥冲洗装置3,从而能够利用测距传感器51对滚刀1上端和下端的刀刃同时进行检测。
49.实施例二:
50.根据本技术实施例的一种实时可视化盾构机滚刀检测方法,包括:
51.获取滚刀1刀刃的宽度l、滚刀座2的内宽d0和滚刀1刀刃两侧测距传感器51的测量值dl、dr;
52.基于l、d0、dl和dr计算滚刀1刀刃的理论磨损量a;
53.统计一定时长内滚刀1刀刃转至不同角度时滚刀1刀刃两侧测距传感器51的测量值dl、dr,并计算出滚刀1刀刃两侧测距传感器51的测量值的平均值d1a和dra;
54.基于l、d0、dl、dr、d1a和dra判断滚刀1刀刃的磨损情况。
55.在进一步的实施例中,所述理论磨损量a的计算公式为:a1=l-dl-dr-d0。
56.在进一步的实施例中,所述滚刀1刀刃的磨损情况的判断包括:
57.响应于|dr-dl|《3mm,且|a|《1mm,则判断为滚刀1刀刃处于正常磨损状态;
58.响应于dla-dra》2mm,则判断为滚刀1刀刃左侧磨损严重;
59.响应于dra-dla》2mm,则判断为滚刀1刀刃右侧磨损严重;
60.响应于dl=dr,则判断为需要停止作业;
61.响应于dl或dr的测量值大小骤降,则判断为第一透明保护盖52被污泥遮挡,并启动污泥冲洗装置3,以对第一透明保护盖52进行冲洗;
62.另外,若距离检测装置5和可视化装置4的第一透明保护盖52或第二透明保护盖42被污泥水所覆盖,异常报警系统将提示工作人员,并将启动污泥冲洗装置3,及时完成对保护盖上污浊物的清理,保证距离检测装置5和可视化装置4的正常运行。
63.激光传感器的工作原理:激光检测传感器利用激光的高方向性、高单色性和高亮度等特点可实现无接触远距离测量,工作时,由光电元件对准滚刀1刀刃发射激光脉冲,遇到目标反射后,激光向各方向散射,部分散射光返回到信号收集器,被光学系统接收后,成像到雪崩光电二极管上。雪崩光电二极管是一种内部具有放大功能的光学传感器,因此能检测极其微弱的光信号,并将其转化为相应的电信号,通过测量光脉冲往返待测点的时间,乘以光速并除以2,计算出被测目标的距离,计算公式如下:d=c*t/2,(d:测量点a、b间的距离,c:光速,t:光脉冲往返ab两点间1次所需时间),能精准计算出激光传感器距滚刀1刀刃的距离dl、d r,通过数据传输系统传送至上位机,实现计算判断滚刀1现阶段刀刃的工作磨损状况;并通过微型摄像头41观察整体滚刀1的工作状况,进一步验证激光检测装置的有效性,其中,存储器62上存储有可在所述处理器61上运行的程序或指令,所述程序或指令被所述处理器62执行时实现如实施例一中任意一种实现方式所述的方法的步骤,处理器61也用于控制电动回转接头31和照明装置16的工作,并且用于接收测距传感器51和微型摄像头41检测的距离数据和视频数据,存储器62,用于对上述距离数据和视频数据进行存储,并且处理器61可连接外部电子设备,其中,电子设备可以是手机、计算机等具有显示、数据处理以及人机交互功能的电子设备。
64.尽管已经示出和描述了本技术的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本技术的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本技术的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1