一种适应大水位变幅长隧道的船舶通航方法及系统与流程
本发明涉及长隧道船舶通航,具体涉及一种适应大水位变幅长隧道的船舶通航方法及系统。
背景技术:
1、通航隧道是一种实现限制性区域船舶通航的新型、特殊船舶通航设施,在世界范围内十分稀少,随着我国内河航运梯级开发的深入,山区内河通航隧道成为解决山区航道关键卡口及实现通航建筑物间有效衔接的有效途径,可彻底打通航运大动脉的梗阻点,大幅提高限制性航段航道尺度,缩短船舶航行里程。为便于船舶通航,通航隧洞长度一般超过1km,横断面积大于200m2,断面系数通常小于4,狭长是通航隧道的主要特点,由于狭长通航隧道通航尺度窄、能见度不良、环境封闭等特点,对船舶及驾驶员安全及操纵水平等有较高的要求。在这种典型的受限航道内,目前船舶通常采取自航方式通航,即船舶依靠自身动力驱动通过隧洞,对通航隧道断面尺度、隧道内的安全间距、通风、照明、通讯、应急救援等均提出了更高的要求。巨大的通航压力下,三峡船闸长期处于超负荷运行状态,且检修维护时间压缩船闸运行管理水平提升及设备维护和优化调度系列管理体系优化等挖潜空间几乎用尽,主要运行指标已达到较高水平,但受上下游航道及闸槛水深限制,依靠提升船舶的标准化及提高船舶装载率方式的挖潜空间不大,三峡枢纽通过能力饱和,挖潜幅度不大使得三峡新通道的建设研究提上了议事日程。
2、专利文献cn111762283b公开了一种隧洞航道船舶通过控制方法,通过过渡航道及设置于两侧的具有缓冲效果的船舶导向吸能装置,对船舶航行导向并吸收船舶部分动能,使船舶稳定行驶入隧洞航道。提供了一种能提高船舶隧洞通航过程安全性和顺畅性,避免安全事故,提高通航效率的隧洞航道船舶通过控制方法。专利文献cn110901831a公开了一种用于非自航船舶长距离通过隧洞的装置。该装置通过在隧洞航道两侧岸顶设置行车轨道,牵引车沿行车轨道运动,驱动待牵引船舶沿隧洞航道运动,结构简单,技术可靠,实施便捷,提高了船舶的通航效率。但是,受山体岩质与现有隧洞开挖技术的限制,并考虑经济性,对于通航同吨级船舶,应尽可能的减小隧洞尺度。而该专利中在两侧岸顶设置牵引车需占用一定的隧洞宽度,将极大的增加施工难度与工程投资。另外,两侧岸顶的牵引机构均为固定式,当水位降低时,同样的牵引绳拉力在船舶航进方向的分力越小,不利于牵引装置的设置。此外,该专利技术在实际操作中还需将两侧的牵引绳抛向船舶,也增加了现场操作的工艺复杂性。专利文献cn114132436公开了一种采用牵引方式的隧洞航道船舶通过控制方法。该发明通过在过渡航道两侧各设置一排具有缓冲效果的船舶导向吸能装置导向,使其保持正对的方向驶入隧洞航道中,并依靠船舶导向吸能装置吸收船舶部分动能,使船舶稳定行驶入隧洞航道,船舶进入隧洞后关闭自身动力并依靠牵引装置牵引通过隧洞航道。
3、另外,目前的隧洞通航方式中,无论是自航式还是拖拽牵引式,在两种方式下都需要船舶与隧洞对准定位,使船舶顺利进入隧洞,受隧道施工技术、安全性、经济性等条件制约,通航隧道宽度尺度较常规航道小、且同时受隧洞入口区域复杂流态以及水位变幅不确定性影响,船舶在驶入隧洞过程中极易偏离正确方向,与隧道两侧墙体发生碰撞,导致船舶和隧道墙体损伤,影响船舶通航安全性。因此,如何更好地提高船舶通过通航隧道的安全性和顺畅性,消除船舶与通航隧洞碰撞风险,提高大水位变幅下长隧道船舶通航的适应性,成为本领域技术人员有待考虑解决的问题。
技术实现思路
1、为了解决现有技术中存在的问题,本发明提供一种适应大水位变幅长隧道的船舶通航方法及系统,根据通航隧道运行环境特征及条件将通航隧道按通行方向划分为不同区域,船舶在隧道入口诱导区依据定位导引系统实现船舶与隧洞的自动对位和导航,提升了船舶通过大水位变幅的长隧道时的安全性。
2、按照本发明第一方面,提供提出一种适应大水位变幅长隧道的船舶通航方法,包括:
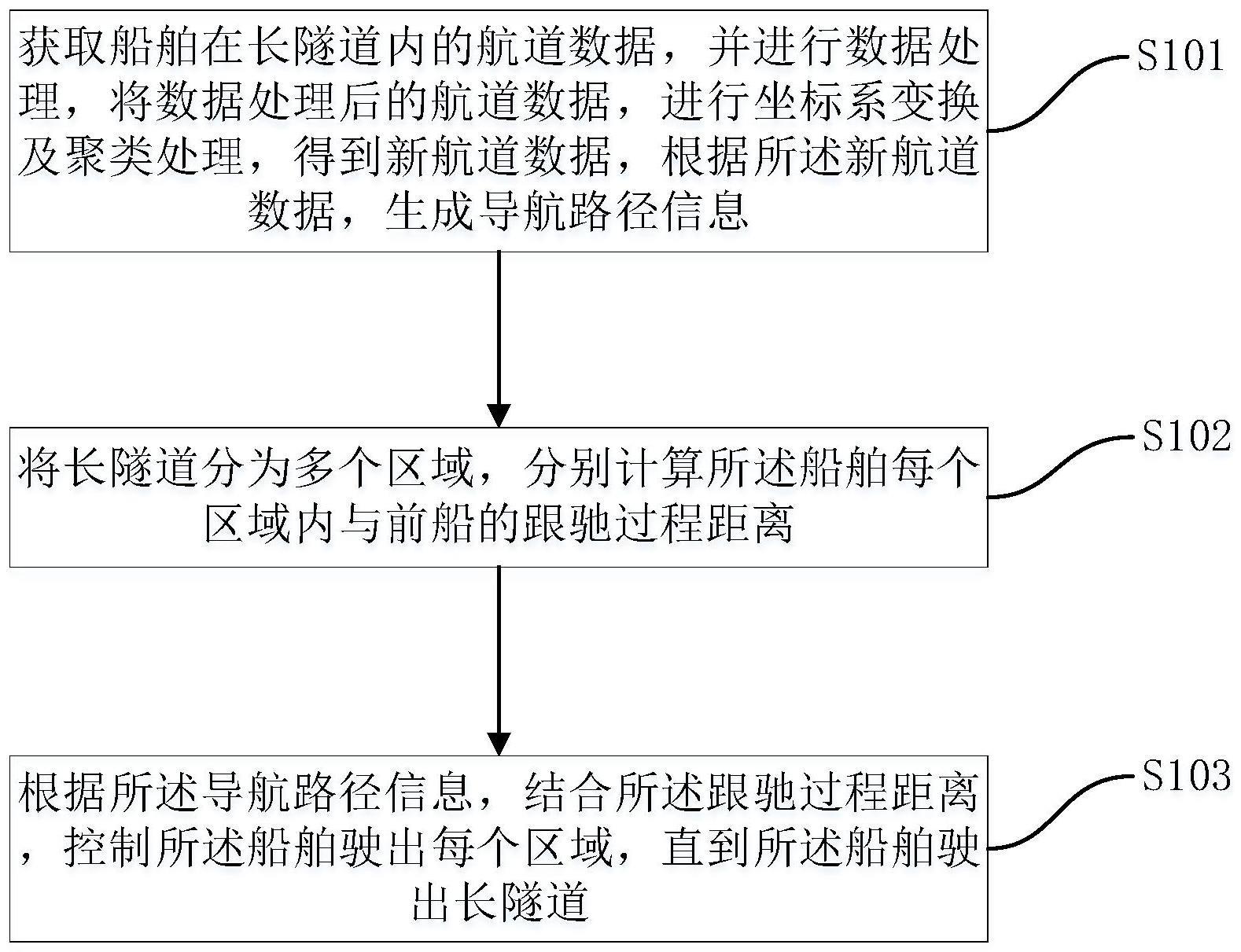
3、获取船舶在长隧道内的航道数据,并进行数据处理,将数据处理后的航道数据,进行坐标系转化及聚类处理,得到新航道数据,根据所述新航道数据,生成导航路径信息;
4、将长隧道分为多个区域,分别计算所述船舶每个区域内与前船的跟驰过程距离;
5、根据所述导航路径信息,结合所述跟驰过程距离,控制所述船舶驶出每个区域,直到所述船舶驶出长隧道。
6、进一步的,所述坐标系转化包括:
7、将数据处理后的航道数据,进行坐标系转化,生成极坐标系,并将所述极坐标系转化为笛卡尔坐标系的点云集。
8、进一步的,所述聚类处理还包括:
9、按预设长隧道的隧洞横截面宽度及坐标描述文件对所述点云集的聚类结果进行筛选,删除非目标点云聚类,标记目标点云聚类重心坐标。
10、进一步的,所述生成导航路径信息包括:
11、定义所述船舶的船体基坐标系、船体里程计坐标系、隧洞坐标系和隧洞宽度方向中间点,获取基于船体基坐标系的位姿、基于船体里程计坐标系的位姿,进行坐标系转化,将关键点的坐标之间按顺序进行直线插补,得到导航路径点的船体里程计坐标点集合。
12、进一步的,所述跟驰过程距离为船舶安全间距,具体表示为:
13、l=l1=dmin+ls+v(t1+t2+t3)
14、其中,l1是前船最后停止位置与所述船舶初始位置之间的距离,ls是前船船长,dmin是两船舶均对水静止时允许的最小安全间距,v为所述船舶的航行速度,t1是所述船舶驾驶员视觉振荡过程中的行驶时间,t2是所述船舶驾驶员观察判断前船动态的反应过程中的行驶时间,t3是所述船舶驾驶员进行制动操作过程中的行驶时间。
15、进一步的,还包括:结合安全系数λ,计算所述跟驰过程距离,具体为:
16、l=λl1=λdmin+λls+λv(t1+t2+t3)。
17、进一步的,所述坐标系转化公式为:
18、
19、其中,x,y分别表示笛卡尔坐标系的横坐标和纵坐标,r表示极坐标的长度,θ表示极坐标的偏移角度;
20、进一步的,所述坐标系转化还包括:
21、所述船舶的船载雷达的坐标系转化公式为:
22、
23、其中,(xs,ys)为所述船载雷达坐标系测量出的任意雷达扫描点,w为所述船载雷达坐标系的x轴与船体基坐标系x轴的夹角,(x,y)为转化到船体基坐标系的任意雷达扫描点。
24、进一步的,还包括:
25、实时监测每个闸室内水位变化,当船舶进入闸室时,关闭所述闸室的闸首闸门后开始泄水直至所述闸室与下一级闸室保持闸室水平,并打开所述下一级闸室的闸首闸门;
26、根据所述闸室的水位升降量,牵引所述船舶进入所述下一级闸室,直至所述船舶通过所有闸室。
27、按照本发明第二方面,提供一种适应大水位变幅长隧道的船舶通航系统,包括:
28、生成导航路径信息模块,用于获取船舶在长隧道内的航道数据,并进行数据处理,将数据处理后的航道数据,进行坐标系转化及聚类处理,得到新航道数据,根据所述新航道数据,生成导航路径信息;
29、计算模块,用于将长隧道分为多个区域,分别计算所述船舶每个区域内与前船的跟驰过程距离;
30、控制模块,用于根据所述导航路径信息,结合所述跟驰过程距离,控制所述船舶驶出每个区域,直到所述船舶驶出长隧道。
31、本发明的技术效果:
32、1)根据通航隧道运行环境特征及条件将通航隧道按通行方向划分为不同区域,船舶在隧道入口诱导区依据定位导引系统实现船舶与隧洞的自动对位和导航,提升了船舶通过大水位变幅的长隧道时的安全性;
33、2)根据大水位变幅下狭长通航隧道特征,提出一种分区调控的隧道船舶通航方法,设置水位监测系统、定位导引系统、通讯系统、消防应急救援系统和集中监视系统,分不同区域配置照明系统、通风系统,能更好地提高船舶通过通航隧道的安全性和顺畅性,使通航隧道内船舶航行过程更安全、畅通和高效;
34、3)推进了隧道船舶通航组织过程的智能化管控进程,导向防撞装置及定位对接方案的设置避免了船舶与隧道的碰撞,防范化解船舶与通航隧洞碰撞风险,提高大水位变幅下长隧道船舶通航的适应性。
- 还没有人留言评论。精彩留言会获得点赞!