一种路面坑槽的演化规律分析方法
本发明属于道路检测领域,更具体地,涉及一种路面坑槽的演化规律分析方法。
背景技术:
1、道路是供车辆和行人通行的重要基础设施,道路的服役状态影响车辆和行人出行的效果。我国汽车保有量已突破2.8亿辆,传统的刚需型出行方式已经难以满足人们日益增长的美好生活对交通出行的需求,亟需进一步从道路设施的角度提升人们的出行质量。路面病害的修复是提升出行质量亟需解决的问题。其中,坑槽是道路路面常见的病害之一,且坑槽对车辆安全行驶影响较大。车辆轮胎通过坑槽时,会出现颠簸,严重时将改变行车方向,对行车安全造成严重威胁,同时,坑槽处车辆承受的反作用力较大,降低轮胎和车辆服役寿命。因此,需通过及时发现路面坑槽病害,制定合理的养护措施,降低坑槽对人们出行的影响。另一方面,坑槽的修复效果依赖于对坑槽形成原因分析的准确程度,精准的病害成因分析可保证坑槽修复决策的合理性,达到降低养护成本、提高道路服役质量的目的。
2、目前,道路坑槽病害的检测,通常是采用相机拍照,然后根据坑槽图像的二维特征进行识别。由于无法直接获取坑槽的深度信息,难以直接获取体积信息。随着检测技术的发展,结构光扫描技术日趋成熟,并可实现行车环境下路面水平方向和深度方向三个维度信息的采集。在此基础上,可通过对采集数据的处理,实现坑槽体积的测算,计算结果可用于指导养护决策和病害修补材料的工程量测算。
3、然而,目前的研究和发明在对三维坑槽进行识别和计算时,存在两方面的问题:(1)在坑槽识别效率方面,三维坑槽包含海量数据,传统人工识别方法效率低,而智能识别方法对计算机的算力要求高,资源消耗大;(2)在路面坑槽演化规律评价指标中,通常仅采用体积值反应坑槽的变化,无法表征坑槽演化规律的多样性以及坑槽的发育方向和发育速度。而坑槽的发育方向和发育速度的掌握,是准确判定坑槽成因的基础,进而才能准确制定养护策略,有效保障行车安全。
4、针对上述问题,本发明提出了一种路面坑槽的演化规律分析方法。
技术实现思路
1、针对现有技术的以上缺陷或改进需求,本发明提供了一种路面坑槽的演化规律分析方法,其目的在于解决现有方法无法表征坑槽演化规律的多样性以及坑槽的发育方向和发育速度的技术问题。
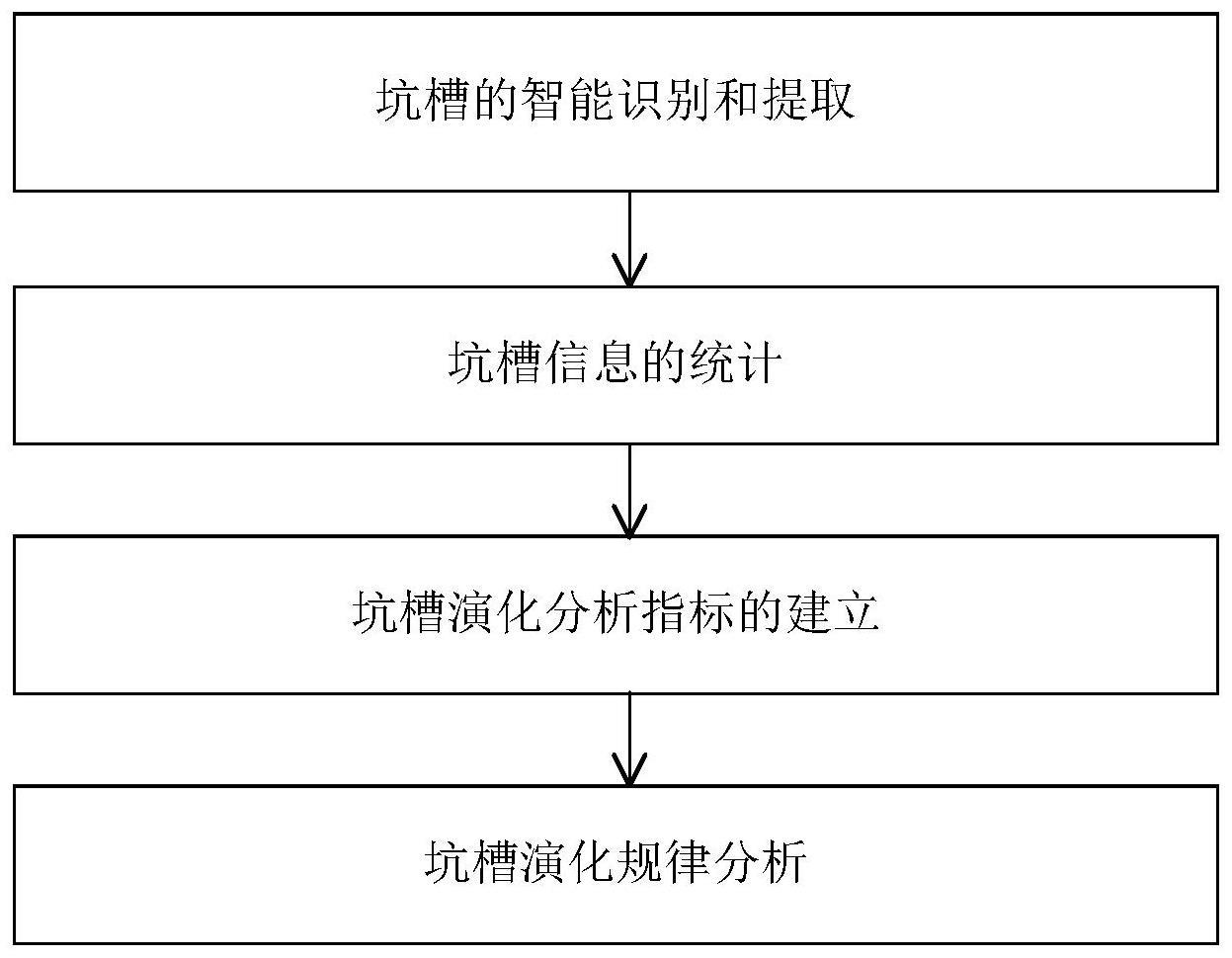
2、为实现上述目的,本发明提供了一种路面坑槽的演化规律分析方法,包括:
3、s1.采集路面三维点云信息并对非坑槽区域和坑槽区域进行标记,得到三维矩阵l;采用平面投影的方式将三维矩阵l转化为包含坑槽深度信息的二维矩阵m;
4、s2.按照深度大小将二维矩阵m中各元素进行排序,统计不同深度值对应的元素数量,并计算不同深度值对应的元素数量相对全部元素数量的占比;
5、s3.根据用户对不同坑槽深度关注度的差异,对不同深度值对应的占比赋予权重,计算坑槽深度分布因子;所述坑槽深度分布因子表征坑槽沿深度方向的发育情况;
6、s4.计算整个坑槽对应的边缘矩阵平均面积,得到坑槽扩张因子;所述坑槽扩张因子表征坑槽沿平面方向的发育情况;
7、s5.依次采集不同时刻对应的坑槽三维点云信息,对每个时刻采集到的坑槽三维点云信息执行步骤s1-s4,得到对应时间的坑槽分布因子和坑槽扩张因子;
8、s6.根据坑槽分布因子变化梯度和坑槽扩张因子变化梯度,得到坑槽演化规律。
9、进一步地,坑槽深度分布因子为:
10、
11、nhi表示不同深度值对应的数量,s表示二维矩阵中全部元素数量,q表示权重,hi表示不同深度值对应的元素。
12、进一步地,二维矩阵m构建方法如下:
13、
14、x、y分别为两个方向的坐标,z为矩阵l的竖轴方向,以竖直向下为正方向;n为三维矩阵l的页数,i为第i页,i=1,2,3,…,n,n表示三维矩阵的页数。
15、进一步地,步骤s4具体包括:
16、依次提取三维矩阵l的第i页l(x,y,i)得到矩阵li,提取li的边缘轮廓矩阵fi;
17、将矩阵li分别与矩阵b和矩阵c执行如下操作:
18、lib=li[x,y]*b[x,y]
19、lic=li[x,y]*c[x,y]
20、式中,*表示卷积操作,lib为图像矩阵li与矩阵b运算形成的新矩阵;lic为图像矩阵li与矩阵c运算形成的新矩阵;矩阵b、矩阵c表示边缘算子;
21、计算lib和lic矩阵中相同位置的最大值,得到坑槽边缘矩阵fi;
22、计算坑槽边缘矩阵fi的面积afi=∑fi(x,y);
23、计算整个坑槽对应边缘矩阵平均面积z,得到坑槽扩张因子
24、进一步地,执行步骤s6之前,所述方法还包括根据系统误差分别对坑槽深度分布因子和扩张因子进行修正,得到坑槽修正深度分布因子u'q和坑槽修正扩张因子z'。
25、进一步地,坑槽修正深度分布因子u'q和坑槽修正扩张因子z'为:
26、
27、
28、v表示系统误差。
29、进一步地,步骤s1包括:
30、将路面三维点云信息转化为三维矩阵h;并对路面三维点云信息的每一层建立坑槽边缘矩阵;
31、利用坑槽边缘矩阵中非零值形成的矩阵对三维矩阵h进行切割,形成表征三维坑槽区域外接长方体的三维矩阵j;
32、将与路面平行的平面k自上往下或自下往上平移与矩阵j相交,在相交过程中分别对非坑槽区域和坑槽区域进行标记,得到三维矩阵l。
33、总体而言,通过本发明所构思的以上技术方案与现有技术相比,能够取得下列有益效果。
34、(1)坑槽形成的原因是多样的,包括车辆行驶速度、车辆荷载、道路材料、环境等因素,不同成因形成的坑槽,其发育特点也存在差异,对应的坑槽修复措施也存在差异;而传统的三维检测方法无法分析坑槽的发育方向,难以提出面向坑槽修复的科学的养护措施,导致坑槽修复效果差,病害反复出现,增加养护成本;
35、本发明基于坑槽的深度信息和轮廓信息,构建了坑槽深度分布因子和扩张因子,分别用于表征坑槽的深度分布和平面分布,通过采集不同时间对应的深度分布因子和扩张因子,计算坑槽深度分布因子变化梯度和扩张因子变化梯度,实现了坑槽在深度和平面两个方向演化规律的分析,可以准确判断坑槽的发育方向和发育速度,进而推测出坑槽的形成原因,可通过采取科学的养护措施修复坑槽病害,降低养护成本,提高车辆行驶的安全性。
36、(2)本发明提出的平面投影方法,可将位置信息投影到平面上,实现了降低坑槽矩阵维度的目的,同时,将点云深度信息以平面矩阵元素的形式,保留在二维平面矩阵上,实现了三维坑槽矩阵向二维矩阵的高效转化,解决了三维数据处理对计算机算力要求高、计算时间长的问题;同时,在不增加系统计算负荷的情况下,考虑了坑槽深度方向的信息,提高了分析的准确率。
37、(3)本发明采用数理统计的方式,统计得到不同坑槽深度值的分布频次和占比,并引入权重参数,可用于表征不同坑槽深度的权重差异,反应养护管理人员对坑槽深度的关注程度。
38、(4)本发明在计算深度分布因子和扩张因子时,考虑了系统误差的影响,提高了计算结果的准确性。
- 还没有人留言评论。精彩留言会获得点赞!