一种用于光谱在线检测目标物放置姿态的调整方法
1.本发明属于机器视觉技术领域,具体涉及一种用于光谱在线检测目标物放置姿态的调整方法。
背景技术:
2.判断物体在空间内的处于何种状态的某一重要参数是姿态,光谱在线目标物姿态检测及姿态调整后的光谱在线目标物品质检测对工业自动化加工有相当重要的技术指导作用。
3.视觉检测技术是精密测试技术领域内最具有发展潜力的新技术,它综合运用了电子学、光电探测、图象处理和计算机技术,将机器视觉引入到工业检测中,实现对物体(产品或零件)三维尺寸或位置的快速测量,具有非接触、速度快、柔性好等突出优点,在现代制造业中有着重要的应用前景。
4.光谱在线检测目标物姿态调整技术使物体在短时间内进行姿态调整,提高了光谱在线检测目标物品质检测的效率和时间。现有光谱在线检测目标物姿态调整是通过人为位置标定进行手动调整,这不仅降低了检测效率,检测质量也不能得到有效地保证。这时自动化的光谱在线检测目标物姿态检测与调整方法变得尤为重要,通过姿态校正算法以实现光谱在线检测目标物自动化姿态调整,以满足光谱在线检测目标物品质检测与工业自动化生产。
技术实现要素:
5.本发明提供一种用于光谱在线检测目标物放置姿态的调整方法。解决现有光谱在线检测目标物姿态调整时是通过人为位置标定的问题,通过姿态校正算法实现光谱在线检测目标物自动化姿态调整,增加检测装置自动化检测的程度,提高检测的效率和准确度。
6.为实现上述目的,本发明的技术方案是:提供一种用于光谱在线检测目标物放置姿态的调整方法。光谱在线检测目标物在线姿态调整方法,包括以下步骤:
7.步骤s1:创建光谱在线检测的目标物姿态检测系统和目标物姿态调整系统;
8.步骤s2:进行目标物姿态检测系统和目标物姿态调整系统的标定;
9.步骤s3:进行光谱在线检测目标物源图像的采集及预处理;
10.步骤s4:预处理后的光谱在线检测目标物图像的特征提取;
11.步骤s5:结合摄像几何原理求解光谱在线检测目标物空间几何信息;
12.步骤s6:根据求解的光谱在线检测目标物空间几何信息,对比目标空间几何信息,使用目标物姿态调整系统调整光谱在线检测目标物姿态。
13.可优选的,所述步骤s1中,目标物姿态检测系统包括左ccd相机和右ccd相机、光照箱、荧光灯、黑色背景和计算机,左ccd相机和右ccd相机和荧光灯均设置在光照箱内,被测光谱在线检测目标物放置在具有黑色背景的光照箱底部。
14.可优选的,所述步骤s1中,目标物姿态调整系统的调整物为放有目标物托盘,其托
盘底部有近红外光透射孔,外周设置有4个滚轮,每个滚轮连接相对应的步进电机。相对的两个滚轮分别连接水平旋转电机,另外两个相对的滚轮分别连接垂直旋电机,水平旋转电机和垂直旋电机分别控制光谱在线检测目标物水平旋转和垂直旋转,以校正目标物姿态的准确性,托盘底部与光照箱底部平行。
15.可优选的,所述步骤s2中,目标物姿态检测系统和目标物姿态调整系统的标定,包括以下步骤:
16.步骤s21:准备光谱在线检测目标物,利用ccd相机采集目标物图像,然后进行特征提取,计算空间几何参数;
17.步骤s22:建立基座坐标系,然后进行坐标系参数的计算;
18.步骤s23:获取步骤s21、s22参数,将步骤s21求得的光谱在线检测目标物的空间几何参数转换到目标物姿态调整系统的基座坐标系下。分别定义ccd相机与基座坐标之间的旋转矩阵r’和平移向量t’,其中r’和t’为相机与基座坐标之间的初始校正参数。通过参数从而解得目标物姿态调整系统基座坐标系下的光谱在线检测目标物空间几何参数,并且与设定的目标姿态空间几何参数对比。
19.可优选的,所述步骤s3中,目标物源图像的预处理包括图像增强算法,灰度化,直方图均衡化。
20.可优选的,所述步骤s4中,进行光谱在线检测目标物特征提取时,要提取被测光谱在线检测目标物的位置点、果梗或花萼点、光谱在线检测目标物边缘特征以及大小特征;其中,目标物的大小特征提取,使用投影面积法来提取。
21.可优选的,所述步骤s5中,通过判断是否有果梗或花萼点,并且目标物外轮廓寻找目标物形心点坐标及其对称轴来判断目标物放置方式,通过目标物图像的位置点和果梗或花萼点坐标提取像面轴线,采用空间交汇法来求解目标物轴线的三维姿态,采用近似匹配位置点的方法求解出目标物位置点世界坐标,以及利用光谱在线检测目标物大小求解公式得到光谱在线检测目标物实际大小。
22.可优选的,所述步骤s6中,求解光谱在线检测目标物姿态参数时,分两种情况:目标物竖直放置时直接定义姿态参数,无需求解;倾斜放置时,采用空间几何知识的方法求解目标物姿态参数。
23.可优选的,所述步骤s6中,将光谱在线检测目标物姿态参数与目标姿态参数对比,若在误差范围内则光谱在线检测目标物姿态不需要调整,否则将姿态参数相关数据送入目标物姿态调整系统的控制机构,通过驱动电机调节托盘的滚轮按照光谱在线检测目标物目标姿态进行调整。
24.对本技术方案的进一步补充,如上所述,本发明涉及的用于光谱在线检测目标物放置姿态的调整方法,具有以下实际有益效果:
25.本发明的用于光谱在线检测目标物放置姿态的调整方法,通过图像摄取、图像预处理、特征提取及其采用空间交汇方法求解,通过图像采集处理、特征提取以及光谱在线检测目标物投影方程与摄像光心确定的平面方程,求解得到光谱在线检测目标物的世界坐标系下的空间几何参数。利用计算机将数据参数送入执行结构中进行光谱在线检测目标物姿态调整;本发明结构简单,设备成本比较低,检测效率高,物体姿态调整时间短,能有效提高光谱在线检测目标物品质检测效率和工业自动化生产,能很好适应大规模目标物品质检测
与工业生产需要。
附图说明
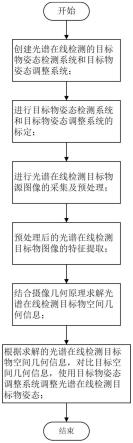
26.图1是一种用于光谱在线检测目标物在线姿态调整方法的实施方式流程图;
27.图2是目标物姿态检测系统构成图;
28.图3是姿态调整目标物托盘;
29.图4是滚轮电机驱动安装位置图;
30.图5是目标物姿态调整系统的标定的流程图;
31.图6是目标物姿态调整前的判断流程图;
32.图7是实验结果数据表。
33.元件标号说明:1、左ccd相机;2、右ccd相机;3、光照箱;4、荧光灯;5、黑色背景;6、计算机;7、托盘;8、近红外光透射孔;9、滚轮安装位置;10、滚轮;11、水平旋转电机;12、垂直旋电机;
具体实施方式
34.以下由具体的实施例说明本发明的实施方式,通过本说明书所提供的信息可以轻易地了解本发明的优点和功效。
35.须知,本说明书附图所绘的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容能涵盖的范围内。同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”等的用语,亦仅为便于叙述明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
36.本发明的用于光谱在线检测目标物放置姿态的调整方法,特征在于,首先创建光谱在线检测的目标物姿态检测系统和目标物姿态调整系统;其次将对建立的目标物姿态检测系统和目标物姿态调整系统进行系统标定。通过ccd相机采集目标物源图像及进行预处理,提取图像特征后根据摄像几何原理求解光谱在线检测目标物空间几何信息,对比目标空间几何信息后使用目标物姿态调整系统调整光谱在线检测目标物姿态,最终达到姿态校正的目的。具体流程如图1所示,具体包括如下步骤:
37.步骤s1:创建光谱在线检测的目标物姿态检测系统和目标物姿态调整系统;
38.步骤s2:进行目标物姿态检测系统和目标物姿态调整系统的标定;
39.步骤s3:进行光谱在线检测目标物源图像的摄取及预处理;
40.步骤s4:预处理后的光谱在线检测目标物图像的特征提取;
41.步骤s5:结合摄像几何原理求解光谱在线检测目标物空间几何信息;
42.步骤s6:根据求解的光谱在线检测目标物空间几何信息,对比目标空间几何信息,使用目标物姿态调整系统调整光谱在线检测目标物姿态。
43.具体地,在步骤s1中,目标物姿态检测系统包括左ccd相机1和右ccd相机2两个ccd相机、光照箱3、荧光灯4、黑色背景5、计算机6。在系统中左ccd相机1和右ccd相机2均位于光
照箱3的上方,两个ccd相机光心连线与光照箱3水平边平行,左ccd相机1和右ccd相机2光轴成角度放置,光照箱3顶部四角分别安装荧光灯4,被测光谱在线检测目标物放置在以黑色为黑色背景5的光照箱3底部。放置位置如图2所示。
44.具体地,在步骤s1中,目标物姿态调整系统的调整物为放有目标物托盘7,圆形的托盘7底部孔洞为近红外光透射孔8,托盘7四周设置滚轮安装位置9,每个滚轮10分别连接相对应的水平旋转电机11和垂直旋电机12,水平旋转电机11和垂直旋电机12分别控制光谱在线检测目标物水平旋转和垂直旋转;水平旋转电机11和垂直旋电机12采用步进电机,托盘7底部与光照箱3底部平行并通过四个滚轮10将托盘7架空,而相应的步进电机固定在台面上。姿态调整目标物托盘如图3所示,步进电机放置位置如图4所示。
45.具体地,在步骤s2中,创建好目标物姿态检测系统和目标物姿态调整系统之后,在进行摄取图像之前,需要对目标物姿态检测系统进行标定,系统标定流程如图5所示。标定出左右两个ccd相机参数和系统参数,对目标物姿态调整系统进行标定,标定托盘7和滚轮10坐标系参数和系统参数。
46.具体地,在步骤s2中,标定流程具体步骤为:
47.步骤s21:采用相机获取目标物图像,然后进行图像特征提取,计算坐标参数;
48.两个处于同一水平面的左ccd相机1和右ccd相机2同时采集同一标定图像,分别标定左ccd相机1和右ccd相机2参数与系统参数,最后给出左ccd相机1和右ccd相机2在世界坐标系中的投影矩阵a1和a2。
49.上述根据空间几何原理标定出了各个相机的投影矩阵,系统参数即两台相机之间相对位置关系也需要确定,系统参数即旋转矩阵r和平移矢量t。左ccd相机1和世界坐标系的旋转、平移关系是r
l
,t
l
,右ccd相机2和世界坐标系的旋转、平移关系是与rr,tr。
50.世界坐标系坐标用xw表示空间内任意一点,则左ccd相机1用x
l
表示,右相ccd机2用xr表示,则有下面方程式成立:
[0051][0052]
根据数学变换可以得到旋转矩阵r和平移矢量t:
[0053][0054]
以目标物苹果为实施例,根据相机采集的光谱在线检测目标物图像,提取光谱在线检测目标物特征点即苹果果蒂点或花萼点,以及苹果形心点坐标,用一条虚线连接这两点坐标,该虚线即为像面轴线。假设像面轴线的方程为ax+by+c=0,接着提取出光谱在线检测目标物在左右两个ccd相机平面上的投影方程分别为a
l x+b
l y+c
l
=0和a
r x+b
r y+cr=0。在各自ccd相机坐标系下,摄像系统焦距为f,投影方程与摄像光心所确定的的平面方程分别为:
[0055][0056]
式中,a
l
、b
l
、c
l
表示左ccd相机1轴线的相机坐标方程的系数;ar、br、cr表示右ccd相
机2轴线的相机坐标方程的系数;x表示特征点横坐标,y表示特征点纵坐标。将公式(3)转换为世界坐标系中的方程为:
[0057][0058]
式中,a
l
、b
l
、c
l
、d
l
表示左ccd相机1轴线的世界坐标方程的系数;ar、br、cr、dr表示右ccd相机2轴线的世界坐标方程的系数;x表示特征点横坐标,y表示特征点纵坐标,z表示特征点竖坐标。根据空间几何原理,方程组(4)即为空间轴线的方程,空间轴线的三个方向数分别为:
[0059][0060]
根据式(5)求出光谱在线检测目标物轴线与空间坐标系中xoy平面投影的夹角和光谱在线检测目标物轴线在xoy平面的投影与空间x轴的夹角。
[0061]
步骤s22:建立基座坐标系,然后进行坐标系参数的计算;
[0062]
步骤s23:获取步骤s21、s22参数,将步骤s21求得的光谱在线检测目标物的空间几何参数转换到目标物姿态调整系统的基座坐标系下。分别定义ccd相机与基座坐标之间的旋转矩阵r’和平移向量t’,r’和t’为相机与基座坐标之间的初始校正参数。通过参数从而解得目标物姿态调整系统基座坐标系下的光谱在线检测目标物空间几何参数,并且与设定的目标姿态空间几何参数对比,对比检测如图6所示。
[0063]
具体地,在步骤s23中,对比检测流程如图6所示,具体流程为:给出光谱在线检测目标物,判断该目标物是否在目标参数范围内,如果是则结束,如果不是则将空间参数转换为基座坐标参数,调整系统进行光谱在线检测,获取调整后的光谱在线检测目标物姿,然后再判断该目标是否在目标参数范围内,如果是则结束,如果不是则继续循环处理。
[0064]
具体地,在步骤s4中,本实施例的目标物以水果为例,系统摄取光谱在线检测目标物图像之后,对图像进行预处理,以适合光谱在线检测目标物特征提取。目标物源图像的预处理包括图像增强算法,灰度化,直方图均衡化。
[0065]
具体地,在步骤s4中,进行光谱在线检测目标物特征提取时,要提取被测光谱在线检测目标物的位置点、果梗或花萼点、光谱在线检测目标物边缘特征以及大小特征;其中,目标物的大小特征提取,使用投影面积法来提取。
[0066]
具体地,在步骤s5中,通过判断是否有果梗或花萼点,并且目标物外轮廓寻找目标物形心点坐标及其对称轴来判断目标物放置方式,通过目标物图像的位置点和果梗或花萼点坐标提取像面轴线,采用空间交汇法来求解目标物轴线的三维姿态,采用近似匹配位置点的方法求解出目标物位置点世界坐标,以及利用光谱在线检测目标物大小求解公式得到光谱在线检测目标物实际大小。
[0067]
具体地,在步骤s6中,通过目标物位置点世界坐标,与目标坐标的世界坐标对比,判断是否通过目标物姿态调整系统调整光谱在线检测目标物姿态。求解光谱在线检测目标物姿态参数时,分两种情况:目标物竖直放置时直接定义姿态参数,无需求解;倾斜放置时,采用空间几何知识的方法求解目标物姿态参数。
[0068]
将光谱在线检测目标物姿态参数与目标姿态参数对比,若在误差范围内则光谱在线检测目标物姿态不需要调整,否则将姿态参数相关数据送入目标物姿态调整系统的控制
机构,通过驱动电机调节圆形托盘7的滚轮10按照光谱在线检测目标物目标姿态进行调整。本实施例中,采用步进电机控制滚轮转动实现不同的旋转角度后,相机拍摄并处理后得到的果品轮廓二值图如图7所示。
[0069]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1