一种轨道异物检测装置、检测系统及检测方法与流程
1.本发明涉及监控领域,更具体地,涉及一种轨道异物检测装置、检测系统及检测方法。
背景技术:
2.我国铁路事业正处于迅猛发展的关键时期,安全运行一直作为铁路事业健康发展的根本。铁路线路跨度大、距离远,途径强风、降水、地震等多类自然灾害,特别是经过桥梁及涵洞等特殊环境,容易发生滑坡、泥石流、滚石等异物侵线事件,严重影响列车正常行驶。针对以上问题,铁路方面仍采用定期人工巡视轨道的方式,在特殊区域安装视频监控、传感器等技防手段,但由于技术本身及应用模式限制,在轨面异物监测方面效果并不理想,无法保证轨面异物监测的准确性与及时性。目前,铁路在自然灾害监测方面采用应力传感技术相对成熟,大多部署在轨道沿线的山体、坡面及涵洞等区域,可有效监测由于铁轨附近山体滑坡、泥石流等自然灾害,但很难判断是否真是发生异物侵线事件。
3.因此,如何精确判断异物侵线事件,是目前急于解决的问题。
技术实现要素:
4.本发明的目的是提出一种轨道异物检测装置、检测系统及检测方法,能够精确判断异物侵线事件。
5.基于上述目的,本发明提供了一种轨道异物检测装置,包括:
6.三维激光雷达模块,用于通过激光实时扫描监测区域;
7.图像采集模块,与所述三维激光雷达模块联动,用于当所述三维激光雷达模块扫描到异物时,对异物进行图像采集;
8.数据处理模块,用于获取并存储所述三维激光雷达模块、所述图像采集模块获得的信息,对比所述三维激光雷达模块获取的异物侵线前、后两期激光点云数据,判断是否存在有影响的异物。
9.可选方案中,所述装置还包括报警模块,所述报警模块用于当所述数据处理模块判断存在有影响的异物时进行现场报警。
10.可选方案中,所述装置包括外壳,所述三维激光雷达模块、所述图像采集模块和所述数据处理模块设置于所述外壳内部,所述报警模块安装在所述外壳的顶壁上方。
11.可选方案中,所述报警模块为声光报警灯。
12.本发明还提供了一种轨道异物检测系统,包括:
13.多个上述的轨道异物检测装置,设置有通信单元;
14.后台处理模块,与所述通信单元通信连接,接收所述轨道异物检测装置传输的三维激光雷达模块和图像采集模块获得的信息,并对信息进行分析处理。
15.可选方案中,所述后台处理模块基于神经网络分析所述图像采集模块获得的图像信息,识别异物并分类。
16.本发明还提供了一种轨道异物检测方法,包括:
17.通过三维激光雷达模块实时扫描监测区域;
18.当所述三维激光雷达模块扫描到异物时,触发图像采集模块对异物进行图像采集;
19.数据处理模块基于所述三维激光雷达模块获取的所述异物信息判断是否存在有影响的异物,并当判断存在有影响的异物时进行报警提示。
20.可选方案中,所述数据处理模块判断是否存在有影响的异物的方法包括:
21.对比所述三维激光雷达模块获取的异物侵线前、后两期激光点云数据,分析异物的形状、面积、距离及位置,并根据所述形状、面积、距离及位置的影响权重比例判断异物是否为有影响异物。
22.可选方案中,所述方法进一步包括:
23.将所述三维激光雷达模块和所述图像采集模块获得的信息送给后台处理模块;
24.所述后台处理模块基于接收的信息判断是否需要报警。
25.可选方案中,所述后台处理模块基于神经网络分析所述图像采集模块获得的图像信息,识别异物并分类,根据识别和分类结果判断是否需要报警。
26.本发明的有益效果在于:
27.三维激光雷达模块具备探测精度高、体积小、可视化、抗有源干扰能力强等优势,同时,结合图像采集模块,可获取到现场视频及图片数据,辅助判别目标物的真实性,本发明能够有效监测轨面出现的目标物,可对落石、轻飘物、彩钢瓦等目标物体进行探测与识别,提升对轨面异物监测能力。
28.本发明的系统具有其它的特性和优点,这些特性和优点从并入本文中的附图和随后的具体实施方式中将是显而易见的,或者将在并入本文中的附图和随后的具体实施方式中进行详细陈述,这些附图和具体实施方式共同用于解释本发明的特定原理。
附图说明
29.通过结合附图对本发明示例性实施例进行更详细的描述,本发明的上述以及其它目的、特征和优势将变得更加明显。
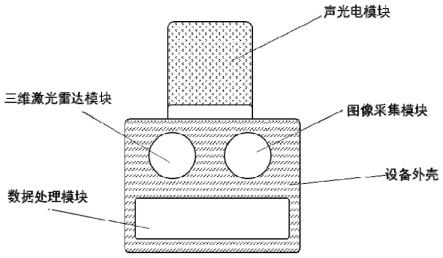
30.图1示出了根据本发明一实施例的轨道异物检测装置的示意图。
31.图2示出了根据本发明一实施例的轨道异物检测方法部分流程图。
具体实施方式
32.下面将更详细地描述本发明。虽然本发明提供了优选的实施例,然而应该理解,可以以各种形式实现本发明而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了使本发明更加透彻和完整,并且能够将本发明的范围完整地传达给本领域的技术人员。
33.实施例1
34.参考图1,本发明一实施例提供了一种轨道异物检测装置,所述装置包括:
35.三维激光雷达模块,用于通过激光实时扫描监测区域;
36.图像采集模块,与所述三维激光雷达模块联动,用于当所述三维激光雷达模块扫描到异物时,对异物进行图像采集;
37.数据处理模块,用于获取并存储所述三维激光雷达模块、所述图像采集模块获得的信息,对比所述三维激光雷达模块获取的异物侵线前、后两期激光点云数据,判断是否存在有影响的异物。
38.本实施例中,所述装置还包括报警模块,所述报警模块用于当所述数据处理模块判断存在有影响的异物时进行现场报警。
39.本实施例中,所述装置包括外壳,所述三维激光雷达模块、所述图像采集模块和所述数据处理模块设置于所述外壳内部,所述报警模块安装在所述外壳的顶壁上方。所述报警模块为声光报警灯。
40.三维激光雷达模块基于主动式激光探测技术,通过向外发射激光束,然后将接收到的从目标反射回来的信号与发射信号进行比较,便可获得目标物相关信息,如距离、位置、面积、高度等。激光雷达具备全天时、三维成像特性,可一次性发射出大量的光学能量,完成对目标物进行精准监测与三维成像,并生成具备属性信息的点云数据。该模块可探测100米范围内的10cm
×
10cm大小的目标物,分析出目标物距离、位置及面积等信息。
41.图像采集模块实现对现场图像数据进行采集,包括视频与图片,用于对轨面目标物进行二次确认。当三维激光雷达探测到目标物时,对轨面目标物进行抓拍图片,后期将图片信息上传至用户使用终端。该模块支持大广角、高分辨率视频图片获取能力,支持数字变焦能力,确保能够准备捕捉目标物。
42.数据处理模块提供三维激光雷达数据的处理、分析及目标物识别判定等功能,支持轨面基准模型的更新,支持三维雷达数据、模型数据、图像采集模块获得的图片数据的存储,支持目标物权重算法更新维护,支持数据传输通信等功能。
43.参照图2,本发明的原理为利用激光雷达高灵敏探测及三维成像技术,分别获取目标侵线前、后两期激光点云数据,经过对激光点云数据进行处理后,对比两期激光点云研判是否存在多余物,从而判别是否存在目标侵线情况。首先,利用三维激光雷达获取轨道面基础点云数据,并对点云数据进行预处理,去除离群及无效的点云数据,提取轨道面基础数据,完成对轨道基准面建模;其次,三维激光雷达将间隔10秒完成对轨道面重复性扫描,并完成对当前获取到的三维激光雷达数据进行快速处理,建立基于八叉树的空间变化检测算法,对比轨道基准模型与当前轨面激光点云数据,通过分析每个点与轨道基准模型的几何关系,对变化区域进行标记,确定为感兴趣区;最后,分析判别感兴趣区的点云数据,分析目标物形状、面积、距离及位置,通过权重方式判别侵线目标真实性。
44.本发明的三维激光雷达模块具备探测精度高、体积小、可视化、抗有源干扰能力强等优势,同时,结合图像采集模块,可获取到现场视频及图片数据,辅助判别目标物的真实性。本发明能够有效监测轨面出现的目标物,可对落石、轻飘物、彩钢瓦等目标物体进行探测与识别,提升对轨面异物监测能力。
45.能够有效监测轨面出现的目标物,可对落石、轻飘物、彩钢瓦等目标物体进行探测与识别,提升对轨面异物监测能力。
46.实施例2
47.本实施例提供了一种轨道异物检测系统,包括:
48.多个上述的轨道异物检测装置,设置有通信单元;
49.后台处理模块,与所述通信单元通信连接,接收所述轨道异物检测装置传输的三
维激光雷达模块和图像采集模块获得的信息,并对信息进行分析处理。
50.本实施例中,所述后台处理模块基于神经网络分析所述图像采集模块获得的图像信息,识别异物并分类。
51.后台处理模块提供数据存储与管理展示、设备管理、通知提示等功能,用户可直接使用软件查看目标物情况,可展示目标物三维激光点云图像、图片,便于直观体现目标物在三维激光雷达与图片中的效果,更好的确认目标物。
52.本系统重点应用于铁路轨面异物监测,可结合声光电设备辅助提示,便于巡视人员及附近人员及时发现。设备采用一体化设计,可采用立杆、挂墙等多种方式,探测角度尽量覆盖整个监测轨面。与此同时,该系统也可应用与隧道、边坡等区域监测。
53.实施例3
54.本实施例提供了一种轨道异物检测方法,包括:
55.通过三维激光雷达模块实时扫描监测区域;
56.当所述三维激光雷达模块扫描到异物时,触发图像采集模块对异物进行图像采集;
57.数据处理模块基于所述三维激光雷达模块获取的所述异物信息判断是否存在有影响的异物,并当判断存在有影响的异物时进行报警提示。
58.本实施例中,所述数据处理模块判断是否存在有影响的异物的方法包括:对比所述三维激光雷达模块获取的异物侵线前、后两期激光点云数据,分析异物的形状、面积、距离及位置,并根据所述形状、面积、距离及位置的影响权重比例判断异物是否为有影响异物。
59.本实施例中,所述方法进一步包括:将所述三维激光雷达模块和所述图像采集模块获得的信息送给后台处理模块;所述后台处理模块基于接收的信息判断是否需要报警。
60.本实施例中,所述后台处理模块基于神经网络分析所述图像采集模块获得的图像信息,识别异物并分类,根据识别和分类结果判断是否需要报警。
61.本方法的实施过程参照前两个实施例,此处不再赘述。
62.以上已经描述了本发明的各实施例,上述说明是示例性的,并非穷尽性的,并且也不限于所披露的各实施例。在不偏离所说明的各实施例的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1