一种雷达点云数据降采样处理方法及相关设备与流程
本说明书涉及信号处理领域,更具体地说,本发明涉及一种雷达点云数据降采样处理方法及相关设备。
背景技术:
1、激光雷达原始点云数量巨大,为提高处理效率,常会对原始点云进行降采样(也被称为下采样)操作以减少点云数据量,从而提高后续点云处理的效率。常用的点云降采样方法有均匀降采样、随机降采样、体素降采样等。虽然各种方法实现原理和效果有所不同,但对点云空间的处理是平等的。例如体素降采样将点云空间均匀分割为紧密排列的格网,以各格网中点云的重心为降采样输出。相比以格网几何中心作为降采样输出的方式,体素降采样虽然在网格内的采样是根据点云的局部空间分布进行的,但在整体网格生成过程对点云空间的处理是均匀的,即网格尺寸和空间分布是均匀的。
2、这种均匀的空间处理方案造成降采样尺度单一,降采样尺度难以确定:若网格尺度过小,则降采样后留下的点数多,降采样的效果不明显;若网格尺度过大,则容易滤掉点云特征,影响后续空间聚类等处理结果,增大目标漏检的风险。尤其对空间范围大且聚类目标小时该问题尤为突出。
技术实现思路
1、在
技术实现要素:
部分中引入了一系列简化形式的概念,这将在具体实施方式部分中进一步详细说明。本发明的发明内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
2、为了提供一种更符合识别需求的降采样点云数据,第一方面,本发明提出一种雷达点云数据降采样处理方法,上述方法包括:
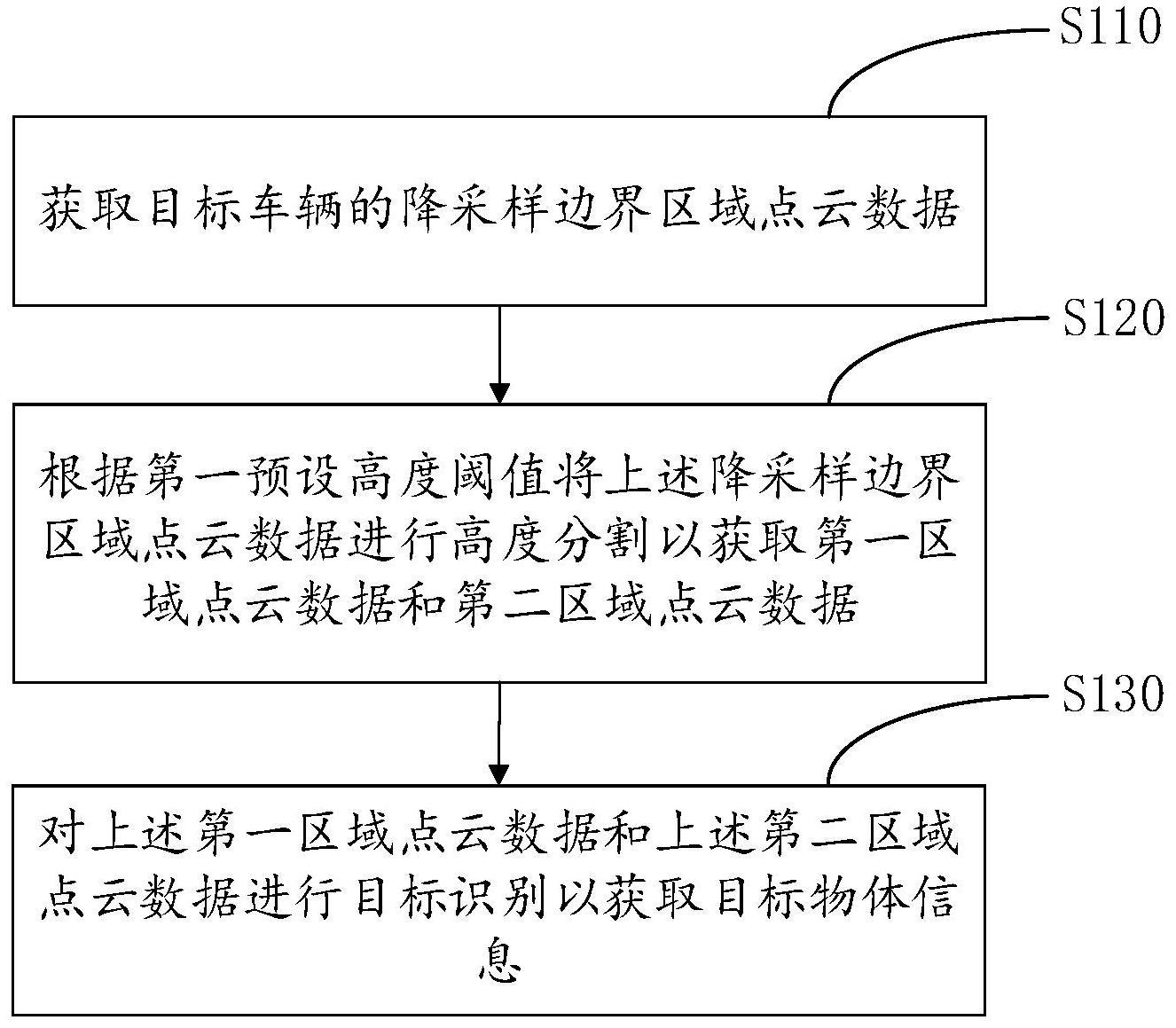
3、获取目标车辆的降采样边界区域点云数据,其中,上述降采样边界区域点云数据是通过目标车辆获取的原始点云数据基于预设降采样边界宽度和降采样边界降采样系数和感知内部降采样系数进行边界分割处理获取的;
4、根据第一预设高度阈值将上述降采样边界区域点云数据进行高度分割以获取第一区域点云数据和第二区域点云数据,其中,上述第一区域点云数据为高度低于或等于上述第一预设高度阈值对应区域的点云数据,上述第一区域对应设置第一降采样系数,上述第二区域点云数据为高度高于上述第一预设高度阈值对应的点云数据,上述第二区域点云数据对应设置第二降采样系数,上述感知内部降采样系数大于上述降采样边界降采样系数,上述降采样边界降采样系数大于上述第二降采样系数,上述第二降采样系数大于上述第一降采样系数;
5、对上述第一区域点云数据和上述第二区域点云数据进行目标识别以获取目标物体信息。
6、可选的,上述目标物体信息包括目标物体的物体类型信息;
7、上述方法还包括:
8、基于上述物体类型信息确定目标物体的对应区域的第三降采样系数。
9、可选的,上述基于上述物体类型信息确定目标物体的对应区域的第三降采样系数,包括:
10、在上述目标物体的高度小于或等于上述第一预设高度阈值的情况下,将上述目标物体对应的第三降采样系数设置为上述第一降采样系数;
11、和/或,
12、在上述目标物体的高度大于上述第一预设高度阈值且长度大于长度阈值或上述目标物体高度大于上述第一预设高度阈值或宽度大于宽度阈值的情况下,将上述目标物体对应的第三降采样系数设置为上述感知内部降采样系数;
13、和/或,
14、在上述目标物体的高度大于上述第一预设高度阈值且长度小于或等于上述长度阈值的情况下,将上述目标物体对应的第三降采样系数设置为降采样边界中非低矮区域点云降采样系数;
15、和/或,
16、在上述目标物体的高度大于上述第一预设高度阈值且宽度小于上述宽度阈值的情况下,将上述目标物体对应的第三降采样系数设置为上述降采样边界中非低矮区域点云降采样系数。
17、可选的,上述方法还包括:
18、在多个上述目标物体的对应区域存在重叠区域的情况下,选择重叠的目标物体的对应区域中较小的降采样系数对上述重叠区域进行降采样处理。
19、可选的,上述方法还包括:
20、在较小的目标物体重叠在较大目标物体的后方的情况下,获取上述较小的目标物体的移动规律;
21、基于上述移动规律和上述较小的降采样系数在上述重叠区域进行降采样处理。
22、可选的,上述方法还包括:
23、在上述目标物体为移动物体的情况下,获取上述移动物体的移动速度;
24、基于上述移动速度确定上述移动物体对应区域的第四降采样系数。
25、可选的,上述方法还包括:
26、在上述目标物体为移动物体的情况下,获取上述移动物体的移动方向;
27、在上述物体的移动方向与上述目标车辆的移动方向不重叠的情况下,将上述感知内部降采样系数设置为上述移动物体对应区域的降采样系数。
28、第二方面,本发明还提出一种雷达点云数据降采样处理装置,包括:
29、获取单元,用于获取目标车辆的降采样边界区域点云数据,其中,上述降采样边界区域点云数据是通过目标车辆获取的原始点云数据基于预设降采样边界宽度和降采样边界降采样系数和感知内部降采样系数进行边界分割处理获取的;
30、分割单元,用于根据第一预设高度阈值将上述降采样边界区域点云数据按第一降采样系数和第二降采样系数进行高度分割以获取第一区域点云数据和第二区域点云数据,其中,上述第一区域点云数据为高度低于或等于上述第一预设高度阈值对应区域的点云数据,上述第二区域点云数据为高度高于上述第一预设高度阈值对应的点云数据,上述感知内部降采样系数大于上述降采样边界降采样系数,上述降采样边界降采样系数大于上述第二降采样系数,上述第二降采样系数大于上述第一降采样系数;
31、识别单元,用于对上述第一区域点云数据和上述第二区域点云数据进行目标识别以获取目标物体信息。
32、第三方面,一种电子设备,包括:存储器、处理器以及存储在上述存储器中并可在上述处理器上运行的计算机程序,上述处理器用于执行存储器中存储的计算机程序时实现如上述的第一方面任一项的雷达点云数据降采样处理方法的步骤。
33、第四方面,本发明还提出一种计算机可读存储介质,其上存储有计算机程序,上述计算机程序被处理器执行时实现第一方面上述任一项的雷达点云数据降采样处理方法。
34、综上,本技术实施例的雷达点云数据降采样处理方法包括:获取目标车辆的降采样边界区域点云数据,其中,降采样边界区域点云数据是通过目标车辆获取的原始点云数据基于预设降采样边界宽度和降采样边界降采样系数和感知内部降采样系数进行边界分割处理获取的;根据第一预设高度阈值将降采样边界区域点云数据按第一降采样系数和第二降采样系数进行高度分割以获取第一区域点云数据和第二区域点云数据,其中,第一区域点云数据为高度低于或等于第一预设高度阈值对应区域的点云数据,第二区域点云数据为高度高于第一预设高度阈值对应的点云数据,感知内部降采样系数大于降采样边界降采样系数,降采样边界降采样系数大于第二降采样系数,第二降采样系数大于第一降采样系数;对第一区域点云数据和第二区域点云数据进行目标识别以获取目标物体信息。本技术实施例提供的雷达点云数据降采样处理方法,将原始点云数据基于预设降采样边界宽度和降采样边界降采样系数进行边界分割并进行初次降采样处理获取降采样边界区域点云数据,再根据第一预设高度阈值将降采样边界区域点云数据按第一降采样系数和第二降采样进行二次降采样,通过在点云空间内使用不同尺度进行降采样操作,可有效减少点云中点的数量以保障后续处理的效率,又能保持点云特征以保障后续聚类等操作的准确性。
35、本发明的雷达点云数据降采样处理方法,本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
- 还没有人留言评论。精彩留言会获得点赞!