一种航空发动机封严篦齿盘测量系统标定方法
1.本发明属于精密测量与仪器技术领域,特别涉及一种航空发动机封严篦齿盘测量系统标定方法。
背景技术:
2.目前针对航空发动机封严篦齿盘的关键几何参量停留在二维空间下的轮廓测量,应用场景十分受限,针对三维轮廓信息的测量尚未得到有效应用。三维度空间下回转台转轴姿态无法确定的问题,导致了在远心背光成像与回转扫描的组合使用中,难以高效率和高精度地实现封严篦齿盘整周三维轮廓的测量。因此,使用基于回转扫描及远心背光成像的测量系统的回转台姿态精确标定,对提升航空发动机中封严篦齿盘的测量效率与测量精度具有十分重要地意义。
3.专利(cn113188478a)“一种远心显微三维测量系统混合标定方法”,提出了一种远心显微三维测量系统混合标定方法。以圆形标定板确定相机固有参数后,将相机视野内测量到的圆心映射至投影平面,通过相机标定的逆方法确定求解投影端的固有内参。在二者参数均已确定的情况下,通过正弦条纹拍摄图像及计算结果推导相机与投影端光轴位姿关系,进而完成三维空间标定。
4.专利(cn114049324a)“超视场尺度下的关联基准远心测量快速标定方法”,将靶标棋盘格置于相机视场,在景深范围内获取棋盘格测量图像,依据亚像素提取算法,并利用相机坐标系与世界坐标系下角点位置对应关系,通过设计的机械调整机构将靶标与标准轴调整至一体,完成远心测量方法下的标定。
5.上述技术的共同之处是均不能同时满足航空发动机封严篦齿盘测量系统中回转台姿态标定的高效率和高精度的要求,且存在操作过程繁琐、费时费力的问题,极大地制约了航空发动机封严篦齿盘测量系统中回转台姿态标定的效率和精度。
技术实现要素:
6.本发明针对现有技术存在的问题,提出一种航空发动机封严篦齿盘测量系统标定方法。该方法基于回转扫描及远心背光成像原理,一次测量完成两个角度位置下的轮廓信息获取,无需考虑回转台中心与标准球中心的位姿关系,提高了数据测量效率。因原始数据是附带角度信息的二维极坐标数据点,避免了因竖直导向导轨运动方向与测量截面的法向量存在夹角带来的点云数据整合误差。通过极坐标与三维空间坐标系的转换结合最优点云拼接步长,整合标准球点云数据,采用最小二乘原则以多截面测量数据求解回转台轴线位置及方向,实现高效率和高精度下航空发动机封严篦齿盘测量系统中回转台姿态标定的目的。
7.本发明的技术方案是:
8.一种航空发动机封严篦齿盘测量系统标定方法,该方法包括以下步骤:
9.1)将标准球放置在回转台上,使标准球随回转台旋转一周时均在传感器的测量量
程内,保持传感器与回转台的相对姿态不变;控制回转台以等角度δθ旋转,在z轴高度z1=h下进行n次测量,获取测量截面在不同角度θi下的一维测量数据yi,i∈1~2
·
n;
10.2)计算第j次测量下标准球的测量截面中心的位置cj,j∈1~n,确定高度z1下转台轴线与测量截面的交点q,并计算测量截面数据yi至点q的距离di,建立二维极坐标系下的数据点集ρ(di,θi),i∈1~2
·
n;
11.3)控制传感器沿z轴方向以固定步长δh运动,在对应高度z2,z3,...,zk,...,zm下,重复步骤1)~步骤2),依次获取m个测量截面的二维测量数据点集{ρk|ρk(d
ik
,θ
ik
),i∈1~2
·
n,k∈1~m},共有2
·n·
m个数据点;
12.4)将数据点集{ρk|ρk(d
ik
,θ
ik
)}以固定步长δh,整合至以点q为原点的右手极坐标系下,即ρ(r,α,z)=ρ(r
ik
,α
ik
,z
ik
),i∈1~2
·
n,k∈1~m,其中δh∈(0,δh)为未知参量;
13.5)求解最优步长δh:更新第l次迭代采用的步长δh
l
,计算第l次迭代下空间球体数据集ρ(r
l
,α
l
,z
l
)的拟合半径r
l
及阈值t
l
,设置终止迭代阈值t及最大迭代次数l
max
作为两个迭代终止条件,其中任一条件满足即终止迭代;以最后一次迭代步长δh
best
作为点云拼接步长最优解,即δh=δh
best
;
14.6)采用步骤4)的方法,将数据点集{ρk|ρk(d
ik
,θ
ik
)}以步长δh
best
整合并转换至x-y-z坐标系下,求取回转台的轴线与第k个测量截面的交点坐标ok(x
0k
,y
0k
,z
0k
),k∈1~m;
15.7)求解回转台轴线位置o(x0,y0,z0)及方向l(a,b,c),完成航空发动机封严篦齿盘测量系统中回转台姿态标定。
16.所述步骤1)中z轴方向为竖直导向导轨运动方向,向上为正方向。
17.所述步骤1)中测量次数n的计算方法为:
[0018][0019]
所述步骤1)仅在0~π范围下进行测量,单次测量完成θ与θ+π两个角度位置下的轮廓信息获取,其中θ∈[0,π]。
[0020]
所述步骤2)中第j次测量下标准球的测量截面中心cj的计算方法为:
[0021][0022]
转台轴线与测量截面的交点q的计算方法为:
[0023][0024]
测量截面数据yi至点q的距离di的计算方法为:
[0025]di
=|y
i-yq|,i∈1~2
·
n。
[0026]
所述步骤2)中数据点集ρ(di,θi)是以点q为原点的极坐标系下的数据,ρ(di,θi)的几何特征是垂直于回转台轴线的平面圆。
[0027]
所述步骤2)中标准球的测量截面中心cj在测量过程中绕点q做圆周运动。
[0028]
所述步骤3)中相邻测量截面高度的关系为z
k-z
k-1
=δh。
[0029]
所述步骤4)中ρ(r,α,z)的三个维度的坐标为:
[0030][0031]
所述步骤4)中最优步长δh的求解目标是:依据最优步长δh确定空间球体数据集ρ(r,α,z),采用最小二乘原则求解ρ(r,α,z)的拟合半径r,在所有迭代中|r-r|的取值最小,其中r为标准球半径。
[0032]
所述步骤5)中第l次迭代中δh
l
的更新方法为:
[0033][0034]
式中,r
l-1
为第l-1次迭代中空间球体的拟合半径。
[0035]
所述步骤5)中当δh从0递增至δh,经由ρ(r,α,z)拟合得到的空间球体拟合半径单调递增。
[0036]
所述步骤5)中第l次迭代下空间球体拟合半径的计算方法为:
[0037]
将第l次迭代下空间球体数据集ρ(r
l
,α
l
,z
l
)转换至x-y-z坐标系下,
[0038][0039]
求取拟合球方程,
[0040][0041]
设定目标函数v,
[0042][0043]
确定拟合参数x
0l
,y
0l
,z
0l
,r
l
的取值,第l次迭代下空间球拟合半径为r
l
。
[0044]
所述步骤5)中阈值t
l
的计算方法为:
[0045]
t
l
=|h
l-h
l-1
|/h
l-1
[0046]
终止迭代阈值t=10-4
,最大迭代次数l
max
=100。
[0047]
所述步骤6)中回转台轴线与第k个测量截面交点ok(x
0k
,y
0k
,z
0k
)的计算方法为:
[0048]
求取拟合球面方程,
[0049][0050]
设定目标函数f,
[0051][0052]
确定拟合参数x
0k
,y
0k
,z
0k
,rk的取值,ok(x
0k
,y
0k
,z
0k
)即为回转台轴线与第k个测量截面的交点。
[0053]
所述步骤7)中回转台轴线位置o(x0,y0,z0)及方向l(a,b,c)的求解方法为:
[0054]
设定测量截面交点ok的空间拟合直线,
[0055][0056]
带入ok(x
0k
,y
0k
,z
0k
)并化简,
[0057][0058]
确定拟合直线参数a,b,c,d的取值,回转台轴线经过(b,d,0)且方向向量为(a,c,1),即回转台轴线的位置为o(x0,y0,z0)=(b,d,0),方向为l(a,b,c)=(a,c,1)。
[0059]
本发明方法的有益效果在于:
[0060]
1.本发明方法基于回转扫描及远心背光成像原理测量标准球原始数据,单次测量完成两个角度位置下的轮廓信息获取,无需考虑回转台中心与标准球中心的相对位姿关系,解决了航空发动机封严篦齿盘测量系统测量效率低的问题。
[0061]
2.本发明方法获取的原始数据是附带角度信息的二维极坐标数据点,避免了因导轨运动方向与测量截面法向量存在夹角带来的点云数据整合误差,提高了航空发动机封严篦齿盘测量系统中回转台姿态标定方法的精度。
[0062]
3.本发明方法依据二分法原理求解最优点云拼接步长,通过极坐标与三维空间坐标系的转换整合标准球点云数据,依据最小二乘原则求解回转台轴线位置及方向,解决了航空发动机封严篦齿盘测量系统中回转台姿态标定方法评定精度低的问题。
[0063]
本发明方法通过高效率的原始数据采集及高精度的标定算法,有效地提高了航空发动机封严篦齿盘测量系统中回转台姿态标定方法的效率和精度。
附图说明
[0064]
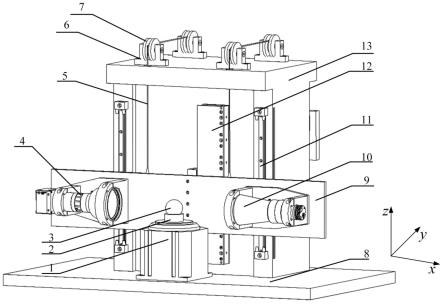
图1为一种航空发动机封严篦齿盘测量系统标定方法的测量装置示意图;
[0065]
图2为一种航空发动机封严篦齿盘测量系统标定方法测量数据示意图。
[0066]
图中:1、回转台;2、标准球底座;3、标准球;4、传感器信号接收端;5、柔性驱动体;6、滑轮支架;7、滑轮;8、底座;9、转接板;10、传感器;11、竖直导向导轨;12、驱动电机;13、支承架。
具体实施方式
[0067]
下面结合附图对本发明的实施例作详细说明。
[0068]
一种航空发动机封严篦齿盘测量系统标定方法包括以下步骤:
[0069]
1)将标准球3放置在回转台1上,使标准球3随回转台1旋转一周时均在传感器10的测量量程内,保持传感器10与回转台1的相对姿态不变,使用的测量方法单次测量完成两个角度位置下的轮廓信息获取,而无需考虑回转台1中心与标准球3中心的位姿关系。控制回转台1以等角度δθ旋转,在z轴高度z1=h下进行n次测量,测量次数n的计算方法为:
[0070][0071]
获取测量截面在不同角度θi下的一维测量数据yi,i∈1~2
·
n;
[0072]
2)计算第j次测量下标准球3测量截面中心的位置cj,
[0073][0074]
转台轴线与测量截面的交点q的计算方法为:
[0075][0076]
测量截面数据yi至点q的距离di的计算方法为:
[0077]di
=|y
i-yq|,i∈1~2
·n[0078]
建立二维极坐标系下的数据点集ρ(di,θi),i∈1~2
·
n。数据点集ρ(di,θi)是以点q为原点的极坐标系下的数据点,ρ(di,θi)的几何特征是垂直于回转台轴线的平面圆,标准球测量截面中心c在测量过程中绕q做圆周运动;
[0079]
3)控制传感器10沿z轴方向以固定步长δh行进,在对应高度z2,z3,...,zk,...,zm下,重复步骤1)~步骤2),则相邻测量截面的高度的关系为,
[0080]zk-z
k-1
=δh
[0081]
依次获取m个测量截面的二维测量数据点集{ρk|ρk(d
ik
,θ
ik
),i∈1~2
·
n,k∈1~m},共有个2
·n·
m数据点;
[0082]
4)将不同测量截面的数据点集{ρk|ρk(d
ik
,θ
ik
)}以固定步长δh,整合至以q为原点的右手极坐标系下,即ρ(r,α,z)=ρ(r
ik
,α
ik
,z
ik
),i∈1~2
·
n,k∈1~m,对应三个维度的坐标为,
[0083][0084]
δh∈(0,δh)为未知参量。最优δh的求解目标是:依据最优步长δh确定空间球体数据集ρ(r,α,z),采用最小二乘原则求解ρ(r,α,z)的拟合半径r,在所有迭代中|r-r|的取值最小,其中r为标准球半径;
[0085]
5)更新第l次迭代采用的δh
l
。当δh从0递增至δh,经由ρ(r,α,z)拟合得到的空间球半径r单调递增,依据二分法更新δh
l
,
[0086][0087]rl-1
为第l-1次迭代中空间球拟合半径。第l次迭代下空间球体拟合半径计算方法为:将第l次迭代下空间球体数据集ρ(r
l
,α
l
,z
l
)转换至x-y-z坐标系下,
[0088][0089]
求取拟合球方程,
[0090]
[0091]
设定目标函数v,
[0092][0093]
确定拟合参数x
0l
,y
0l
,z
0l
,r
l
的取值,第l次迭代下空间球拟合半径为r
l
;
[0094]
第l次迭代下阈值t
l
计算方法为:
[0095]
t
l
=|h
l-h
l-1
|/h
l-1
[0096]
设置终止迭代阈值t=10-4
及最大迭代次数l
max
=100,任一条件满足即终止迭代,以最后一次迭代步长作为点云拼接步长最优解δh
best
;
[0097]
6)将所有测量截面数据点集以固定步长δh
best
按与步骤4)相同的方法整合拼接,并转换至x-y-z坐标系下,求取回转台轴线与第k(k∈1~m)个测量截面的交点坐标ok(x
0k
,y
0k
,z
0k
)。为求解拟合球面方程,
[0098][0099]
设定目标函数f,
[0100][0101]
确定拟合参数x
0k
,y
0k
,z
0k
,rk的取值,ok(x
0k
,y
0k
,z
0k
)即为回转台1轴线与第k个测量截面交点;
[0102]
7)求解回转台1轴线位置o(x0,y0,z0)及方向l(a,b,c)。设定测量截面交点ok的空间拟合直线,
[0103][0104]
带入ok(x
0k
,y
0k
,z
0k
)并化简,
[0105][0106]
确定拟合直线参数a,b,c,d的取值,回转台轴线经过(b,d,0)且方向向量为(a,c,1),即回转台轴线的位置为o(x0,y0,z0)=(b,d,0),方向为l(a,b,c)=(a,c,1),完成航空发动机封严篦齿盘测量系统中回转台姿态标定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1