毫米波雷达的阵列通道校正方法与流程
1.本发明涉及毫米波雷达技术领域,具体来说涉及一种毫米波雷达的阵列通道校正方法。
背景技术:
2.随着毫米波器件、高速数字信号处理器以及lfmcw(线性调频连续波)雷达信号处理技术的发展,室内人员检测场景下的毫米波雷达应用产品也愈加广泛,随着人口老龄化,一个急需解决的问题是独居老人健康安全监护,不泄露任何个人隐私的条件下毫米波雷达可以实时探测获得老人的距离、方位角、俯仰角以及速度信息;同时,可自主进行分类、识别老人的活动状态,比如行走、站立、坐姿、睡眠等,特别是跌倒检测在老人跌倒后及时发送警报。由于上述人员定位和状态检测依赖多通道频谱数据进行cbf(conventional beamforming,常规波束形成)或mvdr(minimum variance distortionless response,最小方差无失真响应)处理得到的方位、俯仰角度测量值,因此,毫米波雷达室内应用的性能受测角误差影响较大。
3.实际使用的接收天线与理论设计值有所差异,是非理想线性器件,天线加工误差影响各个接收天线的增益、相位时延、微带贴片天线位置,特别是毫米波雷达由于工作频段高、波长短,阵列各组成部件的微小差异、机械加工误差、装配误差等因素都会导致各接收天线通道的初始相位产生很大差异,各接收通道的幅相差异性使通道失配,会严重影响cbf或mvdr的测角结果,使获得的人员目标方位和俯仰角度信息出现严重偏差,进而严重恶化毫米波雷达室内人员定位跟踪性能。而现有的毫米波雷达的阵列通道校正需要在暗室环境进行,成本较高。
技术实现要素:
4.本发明旨在解决现有毫米波雷达的阵列通道校正存在成本较高的问题,提出一种毫米波雷达的阵列通道校正方法。
5.本发明解决上述技术问题所采用的技术方案是:
6.毫米波雷达的阵列通道校正方法,包括以下步骤:
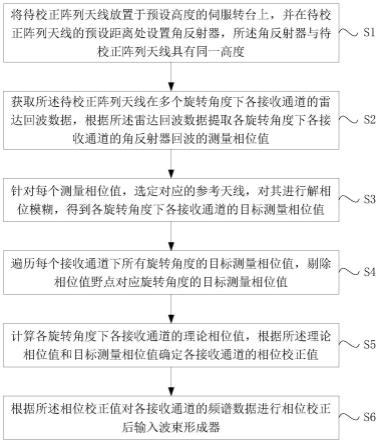
7.步骤1、将待校正阵列天线放置于预设高度的伺服转台上,并在待校正阵列天线的预设距离处设置角反射器,所述角反射器与待校正阵列天线具有同一高度;
8.步骤2、获取所述待校正阵列天线在多个旋转角度下各接收通道的雷达回波数据,根据所述雷达回波数据提取各旋转角度下各接收通道的角反射器回波的测量相位值;
9.步骤3、针对每个测量相位值,选定对应的参考天线,对其进行解相位模糊,得到各旋转角度下各接收通道的目标测量相位值;
10.步骤4、遍历每个接收通道下所有旋转角度的目标测量相位值,剔除相位值野点对应旋转角度的目标测量相位值;
11.步骤5、计算各旋转角度下各接收通道的理论相位值,根据所述理论相位值和目标
测量相位值确定各接收通道的相位校正值;
12.步骤6、根据所述相位校正值对各接收通道的频谱数据进行相位校正后输入波束形成器。
13.进一步地,所述雷达回波数据为解线性频率调制后的数字点频信号。
14.进一步地,所述预设高度大于预设距离,所述预设距离大于远场测试距离,所述角反射器的尺寸小于毫米波雷达的距离分辨率。
15.进一步地,步骤2中,所述测量相位值的提取方法包括:
16.步骤21、依次对各旋转角度下各接收通道的雷达回波数据作加窗傅里叶变换,得到各距离对应的频谱数据;
17.步骤22、确定角反射器所在的距离单元序号,并提取所述距离单元序号对应的频谱数据,根据该频谱数据得到角反射器回波的测量相位值,具体公式如下:
[0018][0019]
其中,为测量相位值,arctan为反正切函数,imag()为该频谱数据的虚部,real()为该频谱数据的实部。
[0020]
进一步地,所述步骤3具体包括:
[0021]
步骤31、确定待校正阵列天线在各旋转角度下的水平发射角,针对每个水平发射角,分别执行以下步骤:
[0022]
步骤311、将第i个接收通道作为参考通道,计算第i个接收通道与第i+1个接收通道的相位差值;
[0023]
步骤312、若θj<0,并且则若θj>0,并且>0,并且则
[0024]
其中,θj为第j个水平发射角,j=1,2,3,
…
,m,m为旋转角度的数量,为第i个接收通道第j个水平发射角的测量相位值与第i+1个接收通道第j个水平发射角的测量相位值的差值,即i=1,2,3,
…
,n,n为接收通道的数量;
[0025]
步骤313、计算各接收通道与第1个接收通道的相位差值,得到各接收通道的目标测量相位值,即测量相位值,即第i个接收通道第j个水平发射角的目标测量相位值。
[0026]
进一步地,所述步骤4具体包括:
[0027]
若目标测量相位值满足以下条件,则将剔除:
[0028]
且
[0029]
其中,为第i个接收通道第j个水平发射角的目标测量相位值,为第i个接收通道第j-1个水平发射角的目标测量相位值,为第i个接收通道第j+1个水平发射角的目标测量相位值。
[0030]
进一步地,步骤5中,所述理论相位值的计算公式如下:
[0031][0032]
其中,第i个接收通道第j个水平发射角的理论相位值,λ为波长,d为均匀线阵天线通道间距,θj为待校正阵列天线在各旋转角度下的水平发射角,sin(θj)≈θj。
[0033]
进一步地,步骤5中,所述各接收通道的相位校正值的确定方法包括:
[0034]
步骤51、计算所述目标测量相位值与对应理论相位值的差值,得到各旋转角度下各接收通道的误差剩余,即:
[0035][0036]
其中,e
i,j
为第i个接收通道第j个水平发射角的误差剩余;
[0037]
步骤52、对所述误差剩余进行归一化处理,即:
[0038][0039]
步骤52、针对每个接收通道,计算所有旋转角度下归一化处理后误差剩余的平均值并取共轭,得到对应接收通道的相位校正值,计算公式如下:
[0040][0041]
其中,为第i个接收通道的相位校正值,ei′
,j
为第i个接收通道第j个水平发射角归一化处理后的误差剩余。
[0042]
进一步地,步骤6中,所述相位校正的计算公式如下:
[0043][0044]
其中,xi′
为相位校正后的频谱数据,xi为相位校正前的频谱数据,为第i个接收通道的相位校正值。
[0045]
进一步地,步骤6中,所述波束形成器为cbf或mvdr;
[0046]
所述cbf基于以下公式测量角度:
[0047][0048]
所述mvdr基于以下公式测量角度:
[0049][0050]
其中,yk为测量结果,xi′
为相位校正后的频谱数据,ai为第i个接收通道的阵列导向矢量,为ai的共轭,θk为空域范围内的第k个扫描方位角,n为接收通道的数量;
[0051]
取测量结果yk中的最大值对应的角度θk作为角度测量值θ
′
:
[0052][0053]
本发明的有益效果是:本发明所述的毫米波雷达的阵列通道校正方法,相较于现有的毫米波通道校准方法而言,无需暗室环境即可完成校正,实现了杂波抑制,提升了毫米
波雷达测向精度、定位准确性及状态检测准确率,并且成本较低,易于工程批量实施。
附图说明
[0054]
图1为本发明实施例所述的毫米波雷达的阵列通道校正方法的流程示意图;
[0055]
图2为本发明实施例所述的测试场景示意图;
[0056]
图3为本发明实施例所述的各接收通道在不同水平发射角下的目标测量相位值示意图;
[0057]
图4为本发明实施例所述的剔除相位值野点后各接收通道在不同水平发射角下的目标测量相位值示意图;
[0058]
图5为本发明实施例所述的cbf和mvdr在相位校正前后的角度测量精度示意图。
具体实施方式
[0059]
下面将结合附图对本发明的实施方式进行详细描述。
[0060]
本发明提供的毫米波雷达的阵列通道校正方法,主要技术方案包括:步骤1、将待校正阵列天线放置于预设高度的伺服转台上,并在待校正阵列天线的预设距离处设置角反射器,所述角反射器与待校正阵列天线具有同一高度;步骤2、获取所述待校正阵列天线在多个旋转角度下各接收通道的雷达回波数据,根据所述雷达回波数据提取各旋转角度下各接收通道的角反射器回波的测量相位值;步骤3、针对每个测量相位值,选定对应的参考天线,对其进行解相位模糊,得到各旋转角度下各接收通道的目标测量相位值;步骤4、遍历每个接收通道下所有旋转角度的目标测量相位值,剔除相位值野点对应旋转角度的目标测量相位值;步骤5、计算各旋转角度下各接收通道的理论相位值,根据所述理论相位值和目标测量相位值确定各接收通道的相位校正值;步骤6、根据所述相位校正值对各接收通道的频谱数据进行相位校正后输入波束形成器。
[0061]
具体而言,本发明首先在室外空旷场地分别架设伺服转台和角反射器,并在伺服转台上放置待校正阵列天线,待校正阵列天线和角反射器具有同一预设高度,并且两者的水平距离为预设距离,角反射器的中心对准待校正阵列天线的相位中心;然后控制伺服转台以多个旋转角度进行转动,同时获取待校正阵列天线在多个旋转角度下各接收通道的雷达回波数据,并根据雷达回波数据提取得到测量相位值;再然后,对各测量相位值进行解相位模糊,得到对应的目标测量相位值,并剔除受杂波影响的相位值野点;最后通过得到的测量相位值与计算得到的理论相位值之间的相位差值对各接收通道进行相位校正,实现杂波抑制,进而提升毫米波雷达测向精度、定位准确性及状态检测准确率。
[0062]
实施例
[0063]
本发明实施例所述的毫米波雷达的阵列通道校正方法,如图1所示,包括以下步骤:
[0064]
步骤1、将待校正阵列天线放置于预设高度的伺服转台上,并在待校正阵列天线的预设距离处设置角反射器,所述角反射器与待校正阵列天线具有同一高度;
[0065]
如图2所示,本实施例首先在室外空旷场地分别架设伺服转台和角反射器,并在伺服转台上放置待校正阵列天线,待校正阵列天线和角反射器具有同一预设高度,并且两者的水平距离为预设距离,角反射器的中心对准待校正阵列天线的相位中心。
[0066]
为了尽可能减少杂波在距离维对角反射器雷达回波的影响,本实施例中,所述预设高度大于预设距离,所述预设距离大于远场测试距离,例如,预设高度为1.5m,预设距离为1.2m,待校正阵列天线孔径为40mm,满足远场测试条件。
[0067]
所述角反射器的尺寸小于毫米波雷达的距离分辨率,本实施例中,毫米波雷达的距离分辨率为9cm,待校正阵列天线可以包括多个发射天线和多个接收天线,本实施例中包括2个发射天线,4个接收天线,方位维均匀线阵,理论阵间距为半波长,发射载频62ghz,波长为4.8mm。待校正阵列天线接收的角反射器回波可认为平面波,使各个天线接收信号相位差由角反射器与各天线波程差不同造成。
[0068]
步骤2、获取所述待校正阵列天线在多个旋转角度下各接收通道的雷达回波数据,根据所述雷达回波数据提取各旋转角度下各接收通道的角反射器回波的测量相位值;
[0069]
本实施例中,可以通过计算机控制伺服转台旋转,并且在
±
10
°
的方位角范围内旋转伺服转台,同时每间隔2
°
采集角反射器的雷达回波数据,共采集20组不同角度的雷达回波数据。
[0070]
本实施例中,可以设置16位4通道采集的数据采集卡采集dechirp(解线性频率调制)后的数字点频信号,并通过网口或串口将各接收通道的雷达回波数据发送给计算机处理。
[0071]
本实施例中,所述测量相位值的提取方法包括:
[0072]
步骤21、依次对各旋转角度下各接收通道的雷达回波数据作加窗傅里叶变换,得到各距离对应的频谱数据;
[0073]
其中,窗函数可以为hanning()窗,能够减小频谱泄露,抑制杂波副瓣。
[0074]
步骤22、确定角反射器所在的距离单元序号,并提取所述距离单元序号对应的频谱数据,根据该频谱数据得到角反射器回波的测量相位值,具体公式如下:
[0075][0076]
其中,为测量相位值,arctan为反正切函数,imag()为该频谱数据的虚部,real()为该频谱数据的实部。
[0077]
本实施例中,角反射器所在的距离单元序号可通过d2/δd计算得到,其中,d2为预设距离,δd为毫米波雷达的距离分辨率。
[0078]
步骤3、针对每个测量相位值,选定对应的参考天线,对其进行解相位模糊,得到各旋转角度下各接收通道的目标测量相位值,具体包括:
[0079]
步骤31、确定待校正阵列天线在各旋转角度下的水平发射角,针对每个水平发射角,分别执行以下步骤:
[0080]
步骤311、将第i个接收通道作为参考通道,计算第i个接收通道与第i+1个接收通道的相位差值;
[0081]
步骤312、若θj<0,并且则若θj>0,并且>0,并且则
[0082]
其中,θj为第j个水平发射角,j=1,2,3,
…
,m,m为旋转角度的数量,为第i个
接收通道第j个水平发射角的测量相位值与第i+1个接收通道第j个水平发射角的测量相位值的差值,即i=1,2,3,
…
,n,n为接收通道的数量;
[0083]
步骤313、计算各接收通道与第1个接收通道的相位差值,得到各接收通道的目标测量相位值,即测量相位值,即第i个接收通道第j个水平发射角的目标测量相位值。
[0084]
本实施例中,毫米波雷达包含8个接收通道,通过上述步骤进行解模糊相位后,得到的各接收通道在不同水平发射角下的目标测量相位值请参阅图3,其具体数值如下表所示:
[0085]
相位值通道2通道3通道4通道5通道6通道7通道8夹角-10
°‑
43-92-131-176-222-269-308夹角-8
°‑
36-83-114-148-186-232-263夹角-6
°‑
25-71-93-121-147-193-216夹角-4
°‑
17-57-72-89-106-147-162夹角-2
°‑
9-45-53-64-73-109-118夹角2
°
2354567985112114夹角4
°
266674102113148157夹角6
°
297689124137180193夹角8
°
3588107151168219237夹角10
°
43102126179204260284
[0086]
步骤4、遍历每个接收通道下所有旋转角度的目标测量相位值,剔除相位值野点对应旋转角度的目标测量相位值;
[0087]
为了避免受杂波影响的相位值野点对测量结果的影响,本实施例中,若目标测量相位值满足以下条件,则将剔除:
[0088]
且
[0089]
其中,为第i个接收通道第j个水平发射角的目标测量相位值,为第i个接收通道第j-1个水平发射角的目标测量相位值,为第i个接收通道第j+1个水平发射角的目标测量相位值。
[0090]
剔除相位值野点后,得到的各接收通道的目标测量相位值请参阅图4。
[0091]
步骤5、计算各旋转角度下各接收通道的理论相位值,根据所述理论相位值和目标测量相位值确定各接收通道的相位校正值;
[0092]
本实施例中,所述理论相位值的计算公式如下:
[0093][0094]
其中,第i个接收通道第j个水平发射角的理论相位值,λ为波长,d为均匀线阵天线通道间距,θj为待校正阵列天线在各旋转角度下的水平发射角,sin(θj)≈θj。
[0095]
所述各接收通道的相位校正值的确定方法包括:
[0096]
步骤51、计算所述目标测量相位值与对应理论相位值的差值,得到各旋转角度下
各接收通道的误差剩余,即:
[0097][0098]
其中,e
i,j
为第i个接收通道第j个水平发射角的误差剩余;
[0099]
可以理解,理论相位值与目标测量相位值存在阵列固定相位误差以及噪声影响的相位测量误差δn
i,j
,理论相位值与目标测量相位值之间的关系为:
[0100][0101]
将各接收通道所有水平发射角下的目标测量相位值减去理论相位值,即可得到由阵列固定相位误差和噪声影响的相位测量误差δn
i,j
组成的误差剩余e
i,j
。
[0102]
本实施例中,8个接收通道在部分水平入射角下的理论相位值、目标测量相位值以及误差剩余如下表所示:
[0103][0104]
步骤52、对所述误差剩余进行归一化处理,即:
[0105][0106]
步骤52、针对每个接收通道,计算所有旋转角度下归一化处理后误差剩余的平均值并取共轭,得到对应接收通道的相位校正值,计算公式如下:
[0107][0108]
其中,
[0109]
处理后的误差剩余。
[0110]
步骤6、根据所述相位校正值对各接收通道的频谱数据进行相位校正后输入波束形成器。
[0111]
其中,所述相位校正的计算公式如下:
[0112]
[0113]
其中,xi′
为相位校正后的频谱数据,xi为相位校正前的频谱数据,为第i个接收通道的相位校正值。
[0114]
本实施例中,波束形成器可以为cbf或mvdr;
[0115]
所述cbf基于以下公式测量角度:
[0116][0117]
所述mvdr基于以下公式测量角度:
[0118][0119]
其中,yk为测量结果,xi′
为相位校正后的频谱数据,ai为第i个接收通道的阵列导向矢量,为ai的共轭,θk为空域范围内的第k个扫描方位角,n为接收通道的数量;
[0120]
取测量结果yk中的最大值对应的角度θk作为角度测量值θ
′
:
[0121][0122]
本实施例通过波束形成器cbf和mvdr测量角度,测量精度请参阅图5,可见通过对各接收通道的频谱数据进行相位校正,明显提升了角度测量的精度。
[0123]
综上所述,本实施例所述的毫米波雷达的阵列通道校正方法,相较于现有的毫米波通道校准方法而言,无需暗室环境即可完成校正,实现了杂波抑制,提升了毫米波雷达测向精度、定位准确性及状态检测准确率,并且成本较低,易于工程批量实施。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1