路径规划方法、装置、设备、存储介质和计算机程序产品与流程
本技术涉及导航,特别是涉及一种路径规划方法、装置、设备、存储介质和计算机程序产品。
背景技术:
1、随着自动驾驶的普及,自动驾驶车辆已经能够在部分场景下替代驾驶员的工作。传统的道路级的导航地图的使用对象是驾驶员,驾驶员能够结合道路级的地图和周围的环境做出实时的驾驶任务,而对于自动驾驶车辆来说,需要能够自主提供精确的轨迹信息来完成自动驾驶任务,因此,对于自动驾驶车辆来说,自主实现车道级路径规划以完成自动驾驶任务的问题亟需解决。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种自动驾驶车辆能够自主实现车道级路径规划以完成自动驾驶任务的路径规划方法、装置、设备、存储介质和计算机程序产品。
2、第一方面,本技术提供了一种路径规划方法。该方法包括:
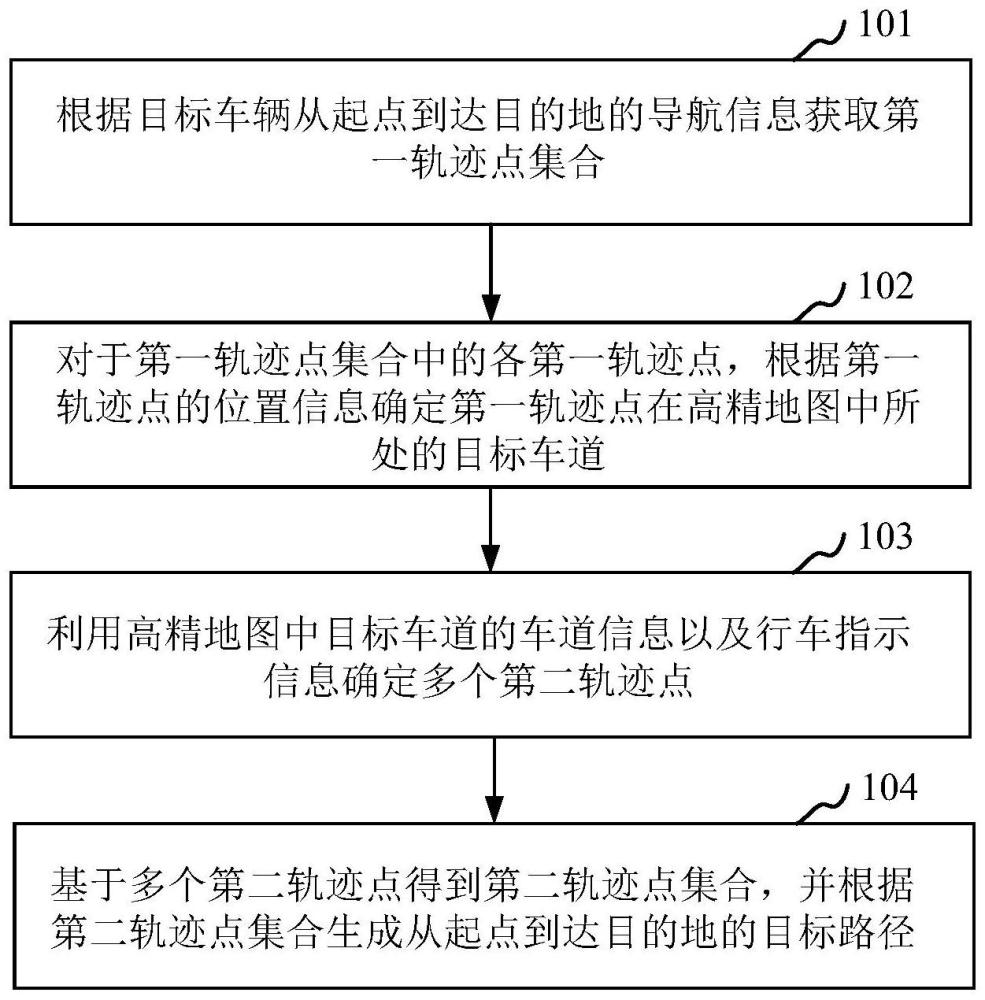
3、根据目标车辆从起点到达目的地的导航信息获取第一轨迹点集合;该导航信息包括从该起点到达该目的地的多个第一轨迹点以及行车指示信息;对于该第一轨迹点集合中的各第一轨迹点,根据该第一轨迹点的位置信息确定该第一轨迹点在高精地图中所处的目标车道;利用高精地图中该目标车道的车道信息以及该行车指示信息确定多个第二轨迹点;该目标车道的车道信息包括对应车道的车道轨迹点集合以及该第一轨迹点所在目标车道的相邻车道的车道信息;基于多个该第二轨迹点得到第二轨迹点集合,并根据该第二轨迹点集合生成从该起点到达该目的地的目标路径。
4、在其中一个实施例中,根据该第一轨迹点的位置信息确定该第一轨迹点在高精地图中所处的目标车道,包括:根据该第一轨迹点的位置信息确定该第一轨迹点在高精地图中所处的初始车道;判断该初始车道是否为正向车道;该正向车道为方向与从该起点到该目的地的方向相同的车道;其中,在该初始车道为正向车道的情况下,将该初始车道作为该目标车道;在该初始车道不为正向车道的情况下,从该初始车道相邻的各车道中确定该目标车道。
5、在其中一个实施例中,该方法还包括:在该目标车辆中的定位设备的定位精度不满足定位要求的情况下,执行判断该初始车道是否为正向车道的步骤。
6、在其中一个实施例中,判断该初始车道是否为正向车道,包括:确定第一航向角以及第二航向角之间的差值;该第一航向角为该第一轨迹点和与该第一轨迹点相邻的另一第一轨迹点之间的航向角,该第二航向角为该第一轨迹点所在目标路段中的该初始车道的中心矢量线上的第一个车道轨迹点以及最后一个车道轨迹点之间的航向角;在该差值大于预设角度阈值的情况下,确定该初始车道不为正向车道;在该差值不大于该预设角度阈值的情况下,确定该初始车道为正向车道。
7、在其中一个实施例中,利用高精地图中该目标车道的车道信息以及该行车指示信息确定多个第二轨迹点,包括:基于该行车指示信息,从与该目标车道的车道信息中获取与目标路段对应的车道中心矢量线中的多个目标车道轨迹点;将该多个目标车道轨迹点作为该多个第二轨迹点。
8、在其中一个实施例中,在该目标车道为左转车道的情况下,基于该行车指示信息,从与该目标车道的车道信息中获取与目标路段对应的车道中心矢量线中的多个目标车道轨迹点,包括:若该行车指示信息指示行驶过该目标路段后左转,则从该目标车道的车道中心矢量线上的多个车道轨迹点中确定与该目标路段对应的多个车道轨迹点作为该多个目标车道轨迹点;若该行车指示信息指示行驶过该目标路段后直行,则在该目标车道允许直行的情况下,从该目标车道的车道中心矢量线上的多个车道轨迹点中确定与该目标路段对应的多个车道轨迹点作为该多个目标车道轨迹点;在该目标车道不允许直行的情况下,从该目标车道的相邻车道中确定允许直行的第一直行车道,并从该第一直行车道的车道中心矢量线上的多个车道轨迹点中确定与该目标路段对应的多个车道轨迹点作为该多个目标车道轨迹点;若该行车指示信息指示行驶过该目标路段后右转,则从该相邻车道中确定允许右转的第一右转车道,并从该第一右转车道的车道中心矢量线上的多个车道轨迹点中确定与该目标路段对应的多个车道轨迹点作为该多个目标车道轨迹点。
9、在其中一个实施例中,在该目标车道为中间直行车道的情况下,基于该行车指示信息,从与该目标车道的车道信息中获取与目标路段对应的车道中心矢量线中的多个目标车道轨迹点,包括:若该行车指示信息指示行驶过目标路段后左转,则根据该目标车道的相邻车道的车道信息,从该相邻车道中确定允许左转的第一左转车道,并从该第一左转车道的车道中心矢量线上的多个车道轨迹点中确定与该目标路段对应的多个车道轨迹点作为该多个目标车道轨迹点;若该行车指示信息指示行驶过该目标路段后直行,则从该目标车道的车道中心矢量线上的多个车道轨迹点中确定与该目标路段对应的多个车道轨迹点作为该多个目标车道轨迹点;若该行车指示信息指示行驶过该目标路段后右转,则根据该目标车道的相邻车道的车道信息,从该相邻车道中确定允许右转的第二右转车道,并从该第二右转车道的车道中心矢量线上的多个车道轨迹点中确定与该目标路段对应的多个车道轨迹点作为该多个目标车道轨迹点。
10、在其中一个实施例中,在该目标车道的为右转车道的情况下,基于该行车指示信息,从与该目标车道的车道信息中获取与目标路段对应的车道中心矢量线中的多个目标车道轨迹点,包括:若该行车指示信息指示行驶过目标路段后左转,则根据该目标车道的相邻车道的车道信息,从该相邻车道中确定允许左转的第二左转车道,并从该第二左转车道的车道中心矢量线上的多个车道轨迹点中确定与该目标路段对应的多个车道轨迹点作为该多个目标车道轨迹点;若该行车指示信息指示行驶过该目标路段后直行,则在该目标车道允许直行的情况下,从该目标车道的车道中心矢量线上的多个车道轨迹点中确定与该目标路段对应的多个车道轨迹点作为该多个目标车道轨迹点;在该目标车道不允许直行的情况下,根据该目标车道的相邻车道的车道信息,从该相邻车道中确定允许直行的第二直行车道,并从该第二直行车道的车道中心矢量线上的多个车道轨迹点中确定与该目标路段对应的多个车道轨迹点作为该多个目标车道轨迹点;若该行车指示信息指示行驶过该目标路段后右转,则从该目标车道的车道中心矢量线上的多个车道轨迹点中确定与该目标路段对应的多个车道轨迹点作为该多个目标车道轨迹点。
11、在其中一个实施例中,该方法还包括:判断该第一轨迹点是否满足运算执行条件,若该第一轨迹点满足该运算执行条件,则执行利用高精地图中该目标车道的车道信息以及该行车指示信息确定多个第二轨迹点的步骤。
12、在其中一个实施例中,该运算执行条件包括该第一轨迹点与该第二轨迹点集合中的最后一个第二轨迹点之间的欧式距离小于预设距离阈值。
13、在其中一个实施例中,根据目标车辆从起点到达目的地的导航信息获取第一轨迹点集合,包括:获取该导航信息;解析该导航信息,得到多个初始第一轨迹点;对各初始第一轨迹点进行纠偏处理,得到多个该第一轨迹点,并根据多个该第一轨迹点确定该第一轨迹点集合。
14、第二方面,本技术还提供了一种路径规划装置。该装置包括:
15、获取模块,用于根据目标车辆从起点到达目的地的导航信息获取第一轨迹点集合;所述导航信息包括从所述起点到达所述目的地的多个第一轨迹点以及行车指示信息;
16、第一确定模块,用于对于所述第一轨迹点集合中的各所述第一轨迹点,根据所述第一轨迹点的位置信息确定所述第一轨迹点在高精地图中所处的目标车道;
17、第二确定模块,用于利用高精地图中所述目标车道的车道信息以及所述行车指示信息确定多个第二轨迹点;所述目标车道的车道信息包括对应车道的车道轨迹点集合以及所述第一轨迹点所在目标车道的相邻车道的车道信息;
18、生成模块,用于基于多个所述第二轨迹点得到第二轨迹点集合,并根据所述第二轨迹点集合生成从所述起点到达所述目的地的目标路径。
19、在其中一个实施例中,该第一确定模块,具体用于:
20、根据该第一轨迹点的位置信息确定该第一轨迹点在高精地图中所处的初始车道;判断该初始车道是否为正向车道;该正向车道为方向与从该起点到该目的地的方向相同的车道;其中,在该初始车道为正向车道的情况下,将该初始车道作为该目标车道;在该初始车道不为正向车道的情况下,从该初始车道相邻的各车道中确定该目标车道。
21、在其中一个实施例中,该装置还包括:
22、定位判断模块,用于在该目标车辆中的定位设备的定位精度不满足定位要求的情况下,执行判断该初始车道是否为正向车道的步骤。
23、在其中一个实施例中,该第一确定模块,具体用于:
24、确定第一航向角以及第二航向角之间的差值;该第一航向角为该第一轨迹点和与该第一轨迹点相邻的另一第一轨迹点之间的航向角,该第二航向角为该第一轨迹点所在目标路段中的该初始车道的中心矢量线上的第一个车道轨迹点以及最后一个车道轨迹点之间的航向角;在该差值大于预设角度阈值的情况下,确定该初始车道不为正向车道;在该差值不大于该预设角度阈值的情况下,确定该初始车道为正向车道。
25、在其中一个实施例中,该第二确定模块,具体用于:
26、基于该行车指示信息,从与该目标车道的车道信息中获取与目标路段对应的车道中心矢量线中的多个目标车道轨迹点;将该多个目标车道轨迹点作为该多个第二轨迹点。
27、在其中一个实施例中,在该目标车道为左转车道的情况下,该第二确定模块,具体用于:
28、若该行车指示信息指示行驶过该目标路段后左转,则从该目标车道的车道中心矢量线上的多个车道轨迹点中确定与该目标路段对应的多个车道轨迹点作为该多个目标车道轨迹点;若该行车指示信息指示行驶过该目标路段后直行,则在该目标车道允许直行的情况下,从该目标车道的车道中心矢量线上的多个车道轨迹点中确定与该目标路段对应的多个车道轨迹点作为该多个目标车道轨迹点;在该目标车道不允许直行的情况下,从该目标车道的相邻车道中确定允许直行的第一直行车道,并从该第一直行车道的车道中心矢量线上的多个车道轨迹点中确定与该目标路段对应的多个车道轨迹点作为该多个目标车道轨迹点;若该行车指示信息指示行驶过该目标路段后右转,则从该相邻车道中确定允许右转的第一右转车道,并从该第一右转车道的车道中心矢量线上的多个车道轨迹点中确定与该目标路段对应的多个车道轨迹点作为该多个目标车道轨迹点。
29、在其中一个实施例中,在该目标车道为中间直行车道的情况下,该第二确定模块,具体用于:
30、若该行车指示信息指示行驶过目标路段后左转,则根据该目标车道的相邻车道的车道信息,从该相邻车道中确定允许左转的第一左转车道,并从该第一左转车道的车道中心矢量线上的多个车道轨迹点中确定与该目标路段对应的多个车道轨迹点作为该多个目标车道轨迹点;若该行车指示信息指示行驶过该目标路段后直行,则从该目标车道的车道中心矢量线上的多个车道轨迹点中确定与该目标路段对应的多个车道轨迹点作为该多个目标车道轨迹点;若该行车指示信息指示行驶过该目标路段后右转,则根据该目标车道的相邻车道的车道信息,从该相邻车道中确定允许右转的第二右转车道,并从该第二右转车道的车道中心矢量线上的多个车道轨迹点中确定与该目标路段对应的多个车道轨迹点作为该多个目标车道轨迹点。
31、在其中一个实施例中,在该目标车道的为右转车道的情况下,该第二确定模块,具体用于:
32、若该行车指示信息指示行驶过目标路段后左转,则根据该目标车道的相邻车道的车道信息,从该相邻车道中确定允许左转的第二左转车道,并从该第二左转车道的车道中心矢量线上的多个车道轨迹点中确定与该目标路段对应的多个车道轨迹点作为该多个目标车道轨迹点;若该行车指示信息指示行驶过该目标路段后直行,则在该目标车道允许直行的情况下,从该目标车道的车道中心矢量线上的多个车道轨迹点中确定与该目标路段对应的多个车道轨迹点作为该多个目标车道轨迹点;在该目标车道不允许直行的情况下,根据该目标车道的相邻车道的车道信息,从该相邻车道中确定允许直行的第二直行车道,并从该第二直行车道的车道中心矢量线上的多个车道轨迹点中确定与该目标路段对应的多个车道轨迹点作为该多个目标车道轨迹点;若该行车指示信息指示行驶过该目标路段后右转,则从该目标车道的车道中心矢量线上的多个车道轨迹点中确定与该目标路段对应的多个车道轨迹点作为该多个目标车道轨迹点。
33、在其中一个实施例中,该装置还包括:
34、运算判断模块,用于判断该第一轨迹点是否满足运算执行条件,若该第一轨迹点满足该运算执行条件,则执行利用高精地图中该目标车道的车道信息以及该行车指示信息确定多个第二轨迹点的步骤。
35、在其中一个实施例中,该运算执行条件包括该第一轨迹点与该第二轨迹点集合中的最后一个第二轨迹点之间的欧式距离小于预设距离阈值。
36、在其中一个实施例中,该获取模块,具体用于:
37、获取该导航信息;解析该导航信息,得到多个初始第一轨迹点;对各初始第一轨迹点进行纠偏处理,得到多个该第一轨迹点,并根据多个该第一轨迹点确定该第一轨迹点集合。
38、第三方面,本技术还提供了一种计算机设备,包括存储器和处理器,该存储器存储有计算机程序,该处理器执行该计算机程序时实现上述第一方面任一项所述的方法的步骤。
39、第四方面,本技术还提供了一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现上述第一方面中任一项所述的方法的步骤。
40、第五方面,本技术还提供了一种计算机程序产品,该计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述第一方面中任一项所述的方法的步骤。
41、上述路径规划方法、装置、设备、存储介质和计算机程序产品,根据目标车辆从起点到达目的地的包括多个第一轨迹点以及行车指示信息的导航信息获取第一轨迹点集合;对于第一轨迹点集合中的各第一轨迹点,根据第一轨迹点的位置信息确定第一轨迹点在高精地图中所处的目标车道;利用高精地图中包括车道轨迹点集合以及第一轨迹点所在目标车道的相邻车道信息的目标车道的车道信息以及该行车指示信息确定多个第二轨迹点;基于多个第二轨迹点得到第二轨迹点集合,并根据第二轨迹点集合生成从起点到达目的地的目标路径。这样,自动驾驶车辆基于导航信息中给出的简略的第一轨迹点集合,结合高精地图中各个第一轨迹点所在目标车道的车道信息,得到更加精准的多个第二轨迹点,根据第二轨迹点集合,即可自主得到该车道级的目标路径,相比于导航信息给出的道路级路径,车道级的目标路径有效提升自动驾驶车辆到达目的地的稳定性和可靠性,准确的完成自动驾驶任务。
- 还没有人留言评论。精彩留言会获得点赞!