基于图多特征的海面小目标检测方法及系统
1.本发明涉及雷达目标检技术领域,特别是一种基于图多特征的海面小目标检测方法及系统。
背景技术:
2.近年来,随着海面目标的小型化和隐身化,小船、快艇、飞机残骸等海面小目标已成为雷达警戒的重点对象。通常,海面漂浮小目标的雷达散射横截面积(rcs)微弱,并且运动速度慢,利用回波能量进行检测的相干或者非相干的恒虚警率检测算法,在对漂浮小目标进行检测时存在明显的性能瓶颈。为了避开能量检测,部分学者提出了基于特征的目标检测方法,这些方法借助杂波和目标回波之间的差异性提取特征,提取的特征包括单分形和分数阶傅里叶变换域分形等分形特征、相对平均幅度和时域的信息熵等时域特征、频域特征、时频域特征以及极化特征等,基于这些特征的检测器都在一定程度上获得了较好的检测效果,但这些特征在提取的过程中都没有考虑数据间的关联性,从而忽略了数据间存在的一些关键信息,导致检测性能受限。
3.图论以及图神经网络作为一种描述数据间关联性的有效方法,在计算机科学、经济领域、离散信号处理等方面有着广泛的应用。为了利用回波数据间幅度的关联性,基于图论的方法大量引入到了海杂波背景下的目标检测中。在2019年出版的ieee transactions on geoscience and remote sensing第57卷上,yan kun等提出了一种基于图的海面漂浮小目标检测方法,这个方法直接在时域对雷达回波信号进行处理,利用回波的幅度构造了一个有向图,考虑到边的连通性,计算这个有向图的拉普拉斯矩阵的最大特征值,通过门托卡洛实验得到检测门限并完成目标检测,对比基于单分形特征的检测器,该检测方法有着优异的性能,尤其是在信噪比较小时。但是,由于该方法提取的图特征单一,并且在求拉普拉斯矩阵的特征值时需要进行特征分解,特征提取所需时间长,所以检测效果有待提高。
技术实现要素:
4.有鉴于此,本发明的目的在于提供一种基于图多特征的海面小目标检测方法及系统,该方法利用了海杂波雷达回波数据之间的关联性获得更好的目标检测性能。
5.为达到上述目的,本发明提供如下技术方案:
6.本发明提供的基于图多特征的海面小目标检测方法,包括以下步骤:
7.步骤1,首先,通过雷达发射机发射脉冲信号,并通过雷达接收机接收由海面反射回来的多脉冲信号,多脉冲信号经过匹配滤波后得到雷达回波数据,该回波数据分为纯杂波回波数据和包含目标的回波数据;
8.从纯杂波回波数据中选取p个距离单元作为训练单元,该训练单元时间序列z
p
为:z
p
=[z
p
(1),z
p
(2),
…
,z
p
(n)],其中,p=1,2,
…
,p,p为训练单元数目,n为时间序列长度;将训练单元时间序列z
p
平均分成长度为l的短向量,即:z
p
=[z
p,1
,z
p,2
,
…
,z
p,l
,
…
,z
p,n/l
],其中,p=1,2,
…
,p,z
p,l
表示训练单元时间序列的第l个短向量,l=1,2,
…
,n/l;
[0009]
从包含目标的回波数据中选取待检测单元r;
[0010]
步骤2,对训练单元时间序列z
p
进行预处理,得到训练单元时间序列z
p
的归一化多普勒功率谱,即,其中,p=1,2,
…
,p,表示由训练单元时间序列z
p
的第l个短向量预处理得到的归一化多普勒功率谱;
[0011]
步骤3,将训练单元时间序列z
p
的归一化多普勒功率谱建模成图和图信号,其中训练单元时间序列z
p
的每个短序列z
p,l
的归一化多普勒功率谱都能通过建模得到两个无向图和图上的信号,并计算得到三个图特征:图拉普拉斯正则η1(z
p,l
)、图拉普拉斯矩阵的迹η2(z
p,l
)、图顶点入度的方差η3(z
p,l
),由这三个特征构造一个图三特征向量:
[0012]
η(z
p,l
)=[η1(z
p,l
),η2(z
p,l
),η3(z
p,l
)]
t
,
[0013]
其中,[
·
]
t
表示对矩阵进行转置;将p个训练单元和每个训练单元的n/l个图三特征向量组成一个训练样本集合
[0014]
步骤4,根据训练样本集合在三维特征空间中获得一个三维凸包,并在给定的虚警概率pf下,利用贪婪凸包学习算法计算检测器的决策区域ω;
[0015]
步骤5,对待检测单元r计算得到图拉普拉斯正则η1(r)、图拉普拉斯矩阵的迹η2(r)、图顶点入度的方差η3(r)这三种图特征,构造待检测单元的图三特征向量η(r),即η(r)=[η1(r),η2(r),η3(r)]
t
;
[0016]
步骤6,根据检测器的决策区域ω和待检测单元的图三特征向量η(r),计算待检测单元的检测统计量根据检测统计量的大小判断目标是否存在:如果检测统计量大于零,表明待检测单元的图三特征向量η(r)在检测器的决策区域外,待检测单元中存在目标,如果检测统计量小于零,表明待检测单元的图三特征向量η(r)在检测器的决策区域内,待检测单元中不存在目标。
[0017]
进一步,步骤2中对训练单元时间序列z
p
=[z
p,1
,z
p,2
,
…
,z
p,l
,
…
,z
p,n/l
]进行预处理,具体子步骤为:
[0018]
2.1计算每一个训练单元的短向量z
p,l
的多普勒功率谱
[0019][0020][0021]
其中,δf为多普勒频率采样间隔,tr为脉冲重复间隔,l为fft采样点数,exp()代表以e为底的指数函数,k表示多普勒单元;
[0022]
2.2根据p个训练单元和每个训练单元的n/l个多普勒功率谱计算均值谱和标准差谱
[0023][0024][0025]
其中,k=-[l/2],...,[l/2]-1;
[0026]
2.3根据均值谱标准差谱和每一个训练单元的短向量z
p,l
的多普勒功率谱计算每一个训练单元的短向量z
p,l
的归一化多普勒功率谱
[0027][0028]
进一步,步骤3中将训练单元时间序列z
p
的归一化多普勒功率谱建模成图和图信号,其中,将训练单元时间序列z
p
的短序列z
p,l
的归一化多普勒功率谱建模成两个无向图和图上的信号,计算得到三个图特征的具体子步骤为:
[0029]
3.1对归一化多普勒功率谱进行最大最小归一化:
[0030][0031]
其中,k=-[l/2],...,[l/2]-1,表示最大最小归一化后的第k个多普勒单元的能量数据,
[0032]
3.2将建模成无向图定义多普勒单元{-[l/2],...,[l/2]-1}为无向图的顶点,得到无向图的顶点集并认为每个顶点与相邻的d个顶点相连,相连顶点之间的权值为1,得到无向图的邻接矩阵和拉普拉斯矩阵定义最大最小归一化后的第k个多普勒单元的能量数据为顶点vk的图信号xk,并将位于无向图上的信号表示为
[0033]
3.3根据量化间隔1/γ对进行均匀量化:
[0034][0035]
其中,k=-[l/2],...,[l/2]-1,表示量化后的第k个多普勒单元的能量数据,i表示多普勒单元的能量数据的量化值,γ表示量化等级数;
[0036]
3.4将建模成无向图,定义量化值{0,
…
,i,
…
γ}为无向图的顶点,得到无向图的顶点集并定义每个多普勒单元中的量化值对应的顶点与其相邻多普勒单元中的量化值对应的顶点相连,并将两个顶点之间的相连次数定义为这两个顶点之间的权值,得到无向图的邻接矩阵
[0037][0038]
对无向图的邻接矩阵的每一行元素求和,得到无向图的入度矩阵
[0039][0040]
其中,表示顶点vi的入度,计算得到无向图的拉普拉斯矩阵
[0041][0042]
3.5根据无向图的拉普拉斯矩阵无向图上的信号、无向图的拉普拉斯矩阵和无向图的入度矩阵计算得到三个图特征:图拉普拉斯正则η1(z
p,l
)、图拉普拉斯矩阵的迹η2(z
p,l
)、图顶点入度的方差η3(z
p,l
):
[0043][0044]
其中,tr(
·
)表示求矩阵的迹;
[0045]
3.6根据图拉普拉斯正则η1(z
p,l
)、图拉普拉斯矩阵的迹η2(z
p,l
)、图顶点入度的方差η3(z
p,l
),构造图三特征向量:η(z
p,l
)=[η1(z
p,l
),η2(z
p,l
),η3(z
p,l
)]
t
。
[0046]
4.如权利要求1所述的基于图多特征的海面小目标检测方法,其特征在于,步骤4中根据训练样本集合在给定的虚警概率pf下,利用贪婪凸包学习算法计算检测器的决策区域ω的具体子步骤为:
[0047]
4.1定义一个包含训练样本集合s所有样本的凸包ch(s):
[0048][0049]
其中,sp{
·
}表示由三角形围成的封闭空间,表示组成凸包ch(s)表面的第q个三角面的三个顶点,q表示凸包ch(s)上的三角面总数;
[0050]
4.2根据给定的虚警概率pf和贪婪凸包学习算法,依次删除使凸包体积减小最大的个虚警训练样本,得到剩余的训练样本集合s',其中,[
·
]表示向下取整;
[0051]
4.3根据剩余的训练样本集合s',组成凸包ch(s'),作为检测器的决策区域ω=ch(s')。
[0052]
进一步,步骤6中根据检测器的决策区域ω=ch(s')和待检测单元的图三特征向量η(r),计算待检测单元的检测统计量
[0053][0054]
其中,det(
·
)表示矩阵的行列式,表示组成凸包ch(s')表面的第f个三角面的三个顶点,f表示凸包ch(s')上的三角面总数。
[0055]
本发明提供的基于图多特征的海面小目标检测系统,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现上述方法。
[0056]
本发明的有益效果在于:
[0057]
本发明提供的基于图多特征的海面漂浮小目标检测方法及系统,通过雷达发射机发射脉冲信号,并通过雷达接收机接收由海面反射回来的多脉冲信号得到包含目标的雷达回波数据,并选取待检测单元r;对训练单元时间序列z
p
进行预处理,得到训练单元时间序列z
p
的归一化多普勒功率谱,将训练单元时间序列z
p
的归一化多普勒功率谱建模成图和图信号,计算得到三个图特征并构造图三特征向量:根据训练样本集合,在三维特征空间中获得一个三维凸包,并在给定的虚警概率pf下,利用贪婪凸包学习算法计算检测器的决策区域ω;对待检测单元r计算得到三种图特征,构造待检测单元的图三特征向量η(r),根据检测器的决策区域ω和待检测单元的图三特征向量η(r),计算待检测单元的检测统计量根据检测统计量的大小确定目标。
[0058]
从海杂波序列中提取三种不同的图特征,并联合利用这三种图特征对纯杂波数据与含有目标的回波数据进行区分以完成海面目标检测,与现有的基于单一图特征的检测器相比,避免了矩阵的特征分解计算,有着更快的特征提取速度,并具有更好的目标检测性能。
[0059]
本方法利用了海杂波雷达回波数据之间的关联性,考虑了数据间存在的一些关键信息,与现有的基于多特征的检测器相比,可以获得更好的目标检测性能。本方法从不同角度考虑雷达回波数据间的相关性,并进行构图,提取多个图特征,避免了矩阵的特征分解计算,有着更快的特征提取速度,以及更好的雷达目标检测效果。
[0060]
本方法把归一化多普勒功率谱建模为两个无向图和图上的信号,以及联合利用三个图特征:图拉普拉斯正则、图拉普拉斯矩阵的迹和图顶点入度的方差,考虑了海杂波数据间的关联性,对纯杂波数据与含有目标的回波数据进行区分。
[0061]
本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
附图说明
[0062]
为了使本发明的目的、技术方案和有益效果更加清楚,本发明提供如下附图进行说明:
[0063]
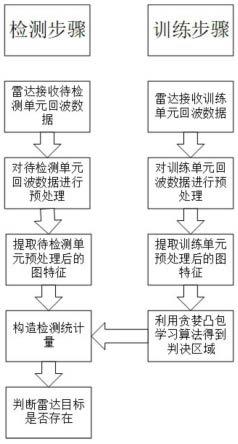
图1为实施例的本发明的实现流程图。
[0064]
图2为实施例的归一化多普勒功率谱建模为两个无向图和图上信号以及得到三个图特征的流程图。
[0065]
图3为实施例的在观测时间从0.064秒成倍增长到4.096秒时,用本发明与现有三种检测器在四种极化下的检测性能比较图。
具体实施方式
[0066]
下面结合附图和具体实施例对本发明作进一步说明,以使本领域的技术人员可以更好的理解本发明并能予以实施,但所举实施例不作为对本发明的限定。
[0067]
参照图1,本发明的基于图多特征的海面漂浮小目标检测方法,本方法分为训练和检测两部分,训练部分包括对训练单元的雷达回波数据进行预处理,对预处理后的数据提取图特征并构造图特征向量,利用凸包学习算法计算判决区域;检测部分包括对待检测单元的雷达回波数据进行预处理,对预处理后的数据提取图特征并构造待检测单元的图特征向量,通过判决区域和待检测单元的图特征向量构造检测统计量判断雷达目标是否存在;包括以下具体步骤:
[0068]
步骤1,首先,通过雷达发射机发射脉冲信号,并通过雷达接收机接收由海面反射回来的多脉冲信号,多脉冲信号经过匹配滤波后得到雷达回波数据,该回波数据分为纯杂波回波数据和包含目标的回波数据;
[0069]
从纯杂波回波数据中选取p个距离单元作为训练单元,该训练单元时间序列z
p
为:z
p
=[z
p
(1),z
p
(2),
…
,z
p
(n)],其中,p=1,2,
…
,p,p为训练单元数目,n为时间序列长度;将训练单元时间序列z
p
平均分成长度为l的短向量,即:z
p
=[z
p,1
,z
p,2
,
…
,z
p,l
,
…
,z
p,n/l
],其中,p=1,2,
…
,p,z
p,l
表示训练单元时间序列的第l个短向量,l=1,2,
…
,n/l;
[0070]
从包含目标的回波数据中选取待检测单元r;
[0071]
步骤2,对训练单元时间序列z
p
=[z
p,1
,z
p,2
,
…
,z
p,l
,
…
,z
p,n/l
]中的每一个训练单元的短向量z
p,l
进行预处理,得到其归一化多普勒功率谱其步骤如下:
[0072]
2.1计算每一个训练单元的短向量z
p,l
的多普勒功率谱
[0073][0074][0075]
其中,δf为多普勒频率采样间隔,tr为脉冲重复间隔,l为fft采样点数,exp()代表以e为底的指数函数,k表示多普勒单元;
[0076]
2.2根据p个训练单元和每个训练单元的n/l个多普勒功率谱计算均值谱和标准差谱
[0077]
[0078][0079]
其中,k=-[l/2],...,[l/2]-1;
[0080]
2.3根据均值谱标准差谱和每一个训练单元的短向量z
p,l
的多普勒功率谱计算每一个训练单元的短向量z
p,l
的归一化多普勒功率谱
[0081][0082]
根据每一个训练单元的短向量z
p,l
的归一化多普勒功率谱得到训练单元时间序列z
p
的归一化多普勒功率谱其中,p=1,2,
…
,p,p为训练单元数目;
[0083]
步骤3,将训练单元时间序列z
p
的归一化多普勒功率谱建模成图和图信号,其中训练单元时间序列z
p
的每个短序列z
p,l
的归一化多普勒功率谱都能通过建模得到两个无向图和图上的信号,由这两个无向图和图上的信号计算得到三个图特征和一个图三特征向量,参照图2,其步骤如下:
[0084]
3.1对归一化多普勒功率谱进行最大最小归一化:
[0085][0086]
其中,k=-[l/2],...,[l/2]-1,表示最大最小归一化后的第k个多普勒单元的能量数据,
[0087]
3.2将建模成无向图定义多普勒单元{-[l/2],...,[l/2]-1}为无向图的顶点,得到无向图的顶点集并认为每个顶点与相邻的d个顶点相连,相连顶点之间的权值为1,得到无向图的邻接矩阵和拉普拉斯矩阵定义最大最小归一化后的第k个多普勒单元的能量数据为顶点vk的图信号xk,并将位于无向图上的信号表示为
[0088]
3.3根据量化间隔1/γ对进行均匀量化:
[0089][0090]
其中,k=-[l/2],...,[l/2]-1,表示量化后的第k个多普勒单元的能量数
据,i表示多普勒单元的能量数据的量化值,γ表示量化等级数;
[0091]
3.4将建模成无向图定义量化值{0,
…
,i,
…
γ}为无向图的顶点,得到无向图的顶点集并定义每个多普勒单元中的量化值对应的顶点与其相邻多普勒单元中的量化值对应的顶点相连,并将两个顶点之间的相连次数定义为这两个顶点之间的权值,得到无向图的邻接矩阵
[0092][0093]
对无向图的邻接矩阵的每一行元素求和,得到无向图的入度矩阵
[0094][0095]
其中,表示顶点vi的入度,计算得到无向图的拉普拉斯矩阵
[0096][0097]
3.5根据无向图的拉普拉斯矩阵无向图上的信号无向图的拉普拉斯矩阵和无向图的入度矩阵计算得到三个图特征:图拉普拉斯正则η1(z
p,l
)、图拉普拉斯矩阵的迹η2(z
p,l
)、图顶点入度的方差η3(z
p,l
):
[0098][0099]
其中,tr(
·
)表示求矩阵的迹;
[0100]
3.6根据图拉普拉斯正则η1(z
p,l
)、图拉普拉斯矩阵的迹η2(z
p,l
)、图顶点入度的方差η3(z
p,l
),构造一个图三特征向量:η(z
p,l
)=[η1(z
p,l
),η2(z
p,l
),η3(z
p,l
)]
t
,其中,[
·
]
t
表示对矩阵进行转置。
[0101]
将p个训练单元和每个训练单元的n/l个图三特征向量组成一个训练样本集合本实例取训练样本数为10000个;
[0102]
步骤4,根据训练样本集合在三维特征空间中获得一个三维凸包,并在给定的虚警概率pf下,利用贪婪凸包学习算法计算检测器的决策区域ω,其步骤如下:
[0103]
4.1定义一个包含训练样本集合s所有样本的凸包ch(s):
[0104][0105]
其中,sp{
·
}表示由三角形围成的封闭空间,表示组成凸包ch(s)表面的第q个三角面的三个顶点,q表示凸包ch(s)上的三角面总数;
[0106]
4.2根据给定的虚警概率pf和贪婪凸包学习算法,依次删除使凸包体积减小最大的[p*n/l*pf]个虚警训练样本,得到剩余的训练样本集合s',其中,[
·
]表示向下取整;
[0107]
4.3根据剩余的训练样本集合s',组成凸包ch(s'),作为检测器的决策区域ω=ch(s')。
[0108]
步骤5,利用待检测单元r的时间序列zr和步骤2.2得到的均值谱和标准差谱预处理得到待检测单元时间序列zr的归一化多普勒功率谱并计算得到检测单元的图拉普拉斯正则η1(r)、图拉普拉斯矩阵的迹η2(r)、图顶点入度的方差η3(r)这三种图特征,然后,得到待检测单元的图三特征向量η(r),即η(r)=[η1(r),η2(r),η3(r)]
t
;
[0109]
步骤6,根据检测器的决策区域ω和待检测单元的图三特征向量η(r),计算待检测单元的检测统计量
[0110][0111]
其中,det(
·
)表示矩阵的行列式,表示组成凸包ch(s')表面的第f个三角面的三个顶点,f表示凸包ch(s')上的三角面总数;
[0112]
并根据检测统计量的大小判断目标是否存在:如果检测统计量大于零,表明待检测单元的图三特征向量η(r)在检测器的决策区域外,待检测单元中存在目标,如果检测统计量小于零,表明待检测单元的图三特征向量η(r)在检测器的决策区域内,待检测单元中不存在目标。
[0113]
基于步骤1到步骤6,实现了基于图多特征的海面漂浮小目标检测。
[0114]
本实施例提供的基于图多特征的海面小目标检测系统,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现上述方法。
[0115]
本实例所使用的10组ipix雷达实测海杂波数据于1993年采集,该数据是目前国际上公认的小目标实测数据集,雷达架设高度为30米,脉冲重复频率为1000hz,距离分辨率为30米;每组数据包含四种极化数据,其中两种为同极化数据hh、vv,两种为交叉极化数据hv、vh;每种极化数据包括14个距离单元,数据长度为2
17
,实验目标是一个直径为1米的金属球。在实验中,分别利用本发明方法、基于图联通密度的检测器、基于三特征的检测器和基于分形特征的检测器进行海面目标检测,参照图3,在观测时间从0.064秒成倍增长到4.096秒时,本发明方法在每个极化方向的10组数据的平均检测概率都远大于三种现有的检测器。综上所述,本发明方法对比上述现有的检测器有着更优异的检测性能。
[0116]
以上所述实施例仅是为充分说明本发明而所举的较佳的实施例,本发明的保护范围不限于此。本技术领域的技术人员在本发明基础上所作的等同替代或变换,均在本发明的保护范围之内。本发明的保护范围以权利要求书为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1