自主移动机器人局部语义可通行概率栅格地图构建方法
本发明属于移动机器人即时定位与建图领域,涉及一种自主移动机器人在室外非结构化环境中的进行局部语义可通行概率栅格地图的构建方法。
背景技术:
1、如今,人工智能的快速发展,促进了移动机器人技术的突破与落地,尤其移动机器人在室外环境中的导航方法与应用方面的研究深受关注。移动机器人越来越多的出现在工业园区、医院、校园等地方,在未知非结构化环境中如何保证移动机器人具备自主导航能力,是一个重要的研究问题。
2、j.borenstein等人研发了一款移动式机器人,使用者将牵引杆推到身体前方,通过手柄感受到明显的牵引力作为转向命令。这种方式不需要声音、振动等交互信息,即可轻松、安全地导引。加州理工学院的siagian c等人研发的轮式移动机器人在采集到画面中用一组线表示道路,通过确定其消失点判断道路的指向,实现自主导航。2018年,tzu-kuanchuang等人研发移动式机器人可识别黄蓝条带轨迹和美国波士顿的“自由轨迹”。系统可以通过两种方式训练深度cnn模型,其中,“行为反射”方式将输入图像直接映射为“左转”、“直行”和“右转”三个运动指令;“直接感知”方式采集轨道距画面中心的横向距离和机器人航向,通过改进的滤波算法来指导机器人跟随轨迹。
3、目前的文献研究集中在结构化环境中的移动机器人建图与导航问题,对于室外非结构化环境,地形结构复杂,障碍物种类多,移动机器人的建图和导航还存在问题。问题一,传统的激光无法获取移动机器人前方道路语义信息,对于像果皮、草地、水洼等语义信息,移动机器人无法规避,无法准确识别环境的可通行性;问题二,激光雷达构建的占据栅格地图,只有单一平面的障碍物信息,缺乏环境信息,并且传统的代价地图缺乏对栅格单元可通行概率的判断;问题三,传统的单层代价地图,在包含语义信息时,不能用于移动机器人导航。
4、因此,亟需一种新的移动机器人局部语义可通行概率栅格地图构建方法来解决上述问题。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种移动机器人局部语义可通行概率栅格地图构建方法,通过计算栅格可通行概率和构建带可通行概率评价的栅格地图,再通过多层代价地图融合,进而解决栅格地图不能表示非结构化环境的问题,实现移动机器人在非结构化环境中的导航。
2、为达到上述目的,本发明提供如下技术方案:
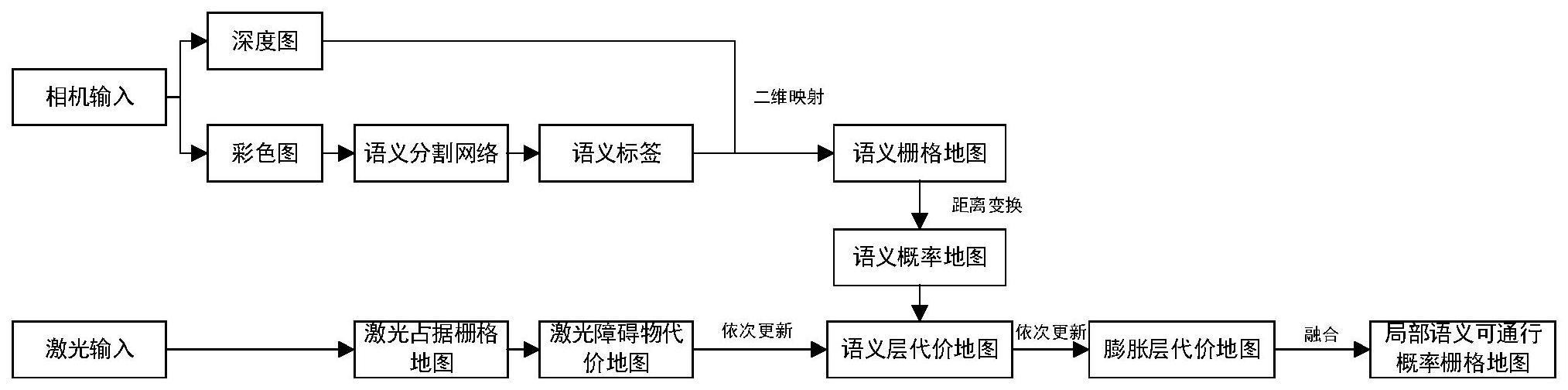
3、一种自主移动机器人局部语义可通行概率栅格地图构建方法,具体包括以下步骤:
4、s1:根据激光数据的测量值,构建占据栅格地图;
5、s2:运用实时语义分割模型,进行语义分割,提取语义标签,进行2d语义分割;
6、s3:语义分割之后,根据坐标关系,利用深度图将语义信息进行投影,即根据语义信息构建语义栅格地图;
7、s4:语义栅格地图概率转换后与多层代价地图融合:通过距离映射将语义信息进行概率转换,形成语义层代价地图,再与激光的障碍物层代价地图进行融合,得到最终的局部语义可通行概率栅格地图。
8、进一步,步骤s1中,构建占据栅格地图,具体包括以下步骤:
9、s11:设置栅格地图的分辨率,即合适的栅格大小;
10、s12:通过当前时刻机器人的位姿状态和观测值,在前一时刻已有栅格地图概率的基础上,更新任意栅格地图的占用概率。
11、进一步,步骤s12中,栅格地图的占用概率更新规则为:
12、(1)通过传感器获取测量值,确定对应栅格被占用mi=1或者是空闲mi=0;
13、(2)根据贝叶斯公式,转换后再取对数,求出栅格单元的状态更新规则;
14、(3)最终得到任意栅格mi的后验概率。
15、进一步,步骤s2中,所述语义分割具体是通过基于卷积神经网络的语义分割模型,在输出层给图像中的每个像素分配一个语义标签,结果是把可通行区域分割出来,用于机器人构建语义栅格地图。
16、进一步,步骤s2中,所述2d语义分割具体包括以下步骤:
17、s21:传感器(相机)图像输入;
18、s22:第一部分为空间路径,主要提取图像中的空间信息;经过三个卷积层,输出特征图;
19、s23:第二部分为语义路径,主要提取上下文信息,通过多层卷积来快速增大感受野并且减少特征图大小,输出特征图;
20、s24:将前两部分获得的特征图通过特征融合模块进行融合,融合特征通过上采样之后输出最后的分割结果,即马路、草地等其他区域用不同颜色区分出来。
21、进一步,步骤s3中,利用深度图将语义信息进行投影,具体包括:通过双目相机获得rgb图像和深度图像,语义分割图像由rgb图像通过语义分割模型得到,可以获得物体或者可通行区域的位置信息,在通过深度图信息结合坐标转换得到实际的距离信息,最终将语义信息投影到局部栅格地图上。
22、进一步,步骤s3具体包括以下步骤:
23、s31:获取语义分割图像中物体或者可通行区域在像素坐标下的位置信息;
24、s32:将rgb坐标平面的像素映射到深度图像素平面内,得到每一个像素的深度值d;
25、s33:通过相机内参公式进行坐标转换,将目标从像素坐标系下转换到相机参考系下;
26、s34:通过旋转和平移将目标从相机坐标系转换到机器人坐标系下;
27、s35:增加一层栅格地图,以机器人为中心,将目标位置投影到栅格地图上构成语义栅格地图。
28、进一步,步骤s4具体包括以下步骤:
29、s41:将语义栅格地图进行概率转换,求出每一个栅格单元的可通行概率pt;
30、s42:多层代价地图融合:在原有的局部代价地图上,增加一层语义层代价地图,最后把激光障碍物层、膨胀层和语义层进行融合,发布到主代价地图层,最终得到局部语义栅格地图。
31、进一步,步骤s41具体包括:将语义栅格地图做进一步处理,区分出栅格地图中的可通行区域;具体是将语义栅格地图中单元中被标记为可通行的栅格单元进行距离转换,把可通行区域栅格单元到最近的非可通行单元的距离映射到一个实数的距离值,以此来表示每一个可通行栅格单元到非可通行单元的远近;经过距离变换,可通行区域的中心部分会获得一个较高的映射值,相反,边缘地区和靠近障碍物的区域的映射值较低:
32、通过距离转换后,再通过高斯分布对距离进行变换,高斯分布均值设置为距离变换的最大值,方差为所有距离的平方的标准差;得到每一个栅格单元的通行概率pd;然后根据不同语义标签预设先验可通行概率pl,最后得到每一个栅格单元的可通行概率pt,pt=pdpl。
33、进一步,步骤s42具体包括:
34、在激光障碍物层中,栅格单元致命障碍物的代价值设置为254,在该代价值内必然与障碍物发生碰撞;自由移动空间的代价值设置为0;最小非自由空间的代价值范围在1到127,该范围内机器人不会发生碰撞;膨胀层的代价值在128到253,未知区域的代价值为255;
35、语义层的代价值设置如下:
36、cs=ci(2-pt)
37、其中,ci是语义标签预设的通行代价值,pt是语义栅格单元的可通行概率;难通行的语义标签的预设通行代价值比易通行的预设通行代价值高,最后能得到语义层每一个栅格单元的代价值;
38、最后按照激光障碍物层、语义层、膨胀层的顺序融合到融合主代价地图中,融合方法采用最大值比较法,公式如下:
39、
40、其中,表示主代价地图第index个栅格单元的代价值,表示当前分层代价地图第index个栅格单元的代价值;更新地图时将当前子层的每个栅格单元的代价值和主代价地图对应位置的代价值进行比较。
41、本发明的有益效果在于:
42、1)本发明在原有激光障碍物代价地图上,增加语义层代价地图,给移动机器人提供了语义信息,可以得到局部环境的可通行性和栅格单元代价值。
43、2)本发明在处理语义栅格地图时,通过先区分出移动机器人前方可通行区域,再通过距离变换,得到栅格单元距离值,再使用高斯分布转换为可通行概率,以此得出不同点的可通行概率,可以更好地表示移动机器人前方的环境信息。
44、3)本发明在针对多层代价地图融合时,依据语义标签预设的代价值,将语义栅格地图的概率值转换为对应语义层代价地图的代价值,最后再采用最大值比较法,依次融合到主代价地图中。可以用于后续移动机器人针对语义信息的路径规划,提升移动机器人的智能性。
45、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!