一种纳米颗粒受气流的曳力测量装置及方法
1.本发明涉及纳米颗粒监测领域,特别是涉及一种伴随异质凝结的纳米颗粒受气流的曳力测量装置及方法。
背景技术:
2.颗粒异质凝结广泛存在于自然及工业生活中,伴随异质凝结的纳米颗粒在随气流运动过程中会受到气流的曳力,由于伴随异质凝结的纳米颗粒内部为固体而外部为液体,与传统单相颗粒受气流曳力不同,需要研究发生异质凝结纳米颗粒受气流的作用力及影响因素。
3.传统针对气流对颗粒作用力的测量是基于纳米机械臂开展的,纳米机械臂操纵颗粒处于特定位置,使气流以特定速度及方向吹向颗粒,置于机械臂上的力学传感器测量机械臂对于颗粒的作用力,进而分析气流对颗粒的曳力。
4.然而该方法不适用于测量气流对伴随异质凝结颗粒作用力的测量,原因为:第一,机械臂与颗粒的接触会影响颗粒外侧液体的分布,进而影响气流对颗粒的曳力;第二,机械臂与颗粒存在一定的接触,导致机械臂与颗粒接触位置的气流无法对颗粒产生作用力,进而影响气流对颗粒曳力的测量。因此,基于纳米机械臂无法准确测量气流对发生异质凝结纳米颗粒的曳力。
技术实现要素:
5.本发明的目的是提供一种纳米颗粒受气流的曳力测量装置及方法,可提高发生异质凝结纳米颗粒受气流的曳力的测量精度。
6.为实现上述目的,本发明提供了如下方案:
7.一种纳米颗粒受气流的曳力测量装置,包括:
8.试验仓;
9.气流产生部件,与所述试验仓连通,用于产生过饱和蒸汽气流,并将所述过饱和蒸汽气流送入所述试验仓内;
10.纳米颗粒产生部件,与所述试验仓连通,用于产生纳米颗粒,并将所述纳米颗粒送入所述试验仓内;
11.激光产生部件,设置在所述试验仓的一侧,用于向所述试验仓内发射第一激光,以在所述试验舱内产生光阱;所述试验仓内的纳米颗粒被所述光阱捕捉,使得纳米颗粒在所述试验仓内悬浮;所述第一激光经过所述纳米颗粒后形成第二激光;
12.探测部件,设置在所述试验仓与所述激光产生部件相对的一侧,用于探测第二激光,并根据所述第二激光确定所述纳米颗粒在所述试验仓内的位置;
13.曳力确定部件,分别与所述探测部件及所述激光产生部件连接,用于根据所述纳米颗粒的位置、所述第一激光的功率,确定光阱对所述纳米颗粒的作用力,以确定所述过饱和蒸汽气流对所述纳米颗粒的曳力。
14.可选地,所述气流产生部件包括:
15.储气罐,用于储存过饱和蒸汽;
16.流量计,与所述储气罐连通,用于控制过饱和蒸汽气流的速度;
17.空气输送管道,分别与所述流量计及所述试验仓连通,用于将过饱和蒸汽气流输送至所述试验仓内。
18.可选地,所述气流产生部件还包括:
19.控温水浴槽,与所述储气罐连通,用于控制所述储气罐内的温度。
20.可选地,所述气流产生部件还包括:
21.湿度控制器,与所述储气罐连接,用于控制所述储气罐内的湿度。
22.可选地,所述气流产生部件还包括:
23.空气压缩机,与所述储气罐连通,用于压缩空气,并将压缩后的空气输送至所述储气罐内,以控制所述储气罐内过饱和蒸汽的压力。
24.可选地,所述纳米颗粒产生部件包括:
25.气溶胶发生器,用于产生纳米颗粒;
26.颗粒输送管道,分别与所述气溶胶发生器及所述试验仓连通,用于将所述纳米颗粒送入所述试验仓内。
27.可选地,所述激光产生部件包括:
28.激光器,用于产生第一激光;
29.激光控制器,与所述激光器连接,用于控制所述第一激光的波长及功率;
30.显微物镜,设置在所述第一激光的光路上,用于将所述第一激光汇聚至所述试验仓内,以形成光阱。
31.可选地,所述探测部件包括:聚光镜、透镜及位置探测器;
32.所述聚光镜设置在所述试验仓与所述激光产生部件相对的一侧,所述聚光镜用于对第二激光进行整形,得到整形激光;
33.所述透镜设置在所述整形激光的光路上,所述透镜用于将所述整形激光汇聚于所述位置探测器的表面;
34.所述位置探测器用于探测微纳颗粒的位置信息。
35.可选地,所述纳米颗粒受气流的曳力测量装置还包括:
36.显微镜,用于观测所述试验仓内在过饱和蒸汽气流作用下微纳颗粒的粒径变化情况及外层液体的分布特征。
37.为实现上述目的,本发明还提供了如下方案:
38.一种纳米颗粒受气流的曳力测量方法,包括:
39.通过气流产生部件向试验仓内输送过饱和蒸汽气流;
40.通过纳米颗粒产生部件产生纳米颗粒,并将所述纳米颗粒送入试验仓内;
41.通过激光产生部件向试验仓内发射第一激光,以在所述试验舱内产生光阱;纳米颗粒被所述光阱捕捉,使得纳米颗粒在所述试验仓内悬浮;所述第一激光经过所述纳米颗粒后形成第二激光;
42.通过探测部件实时探测试验仓内纳米颗粒的位置;
43.通过曳力确定部件根据纳米颗粒的位置、所述第一激光的功率,确定光阱对所述
纳米颗粒的作用力,以确定所述过饱和蒸汽气流对所述纳米颗粒的曳力。
44.根据本发明提供的具体实施例,本发明公开了以下技术效果:气流产生部件将过饱和蒸汽气流送入试验仓内,纳米颗粒产生部件将纳米颗粒送入试验仓内,激光产生部件向试验仓内发射第一激光,以在试验舱内产生光阱;试验仓内的纳米颗粒被光阱捕捉,使得纳米颗粒在试验仓内悬浮;第一激光经过纳米颗粒后形成第二激光;通过探测部件探测第二激光,并根据第二激光确定纳米颗粒在试验仓内的位置,曳力确定部件根据纳米颗粒的位置、第一激光的功率,确定光阱对纳米颗粒的作用力,以确定过饱和蒸汽气流对纳米颗粒的曳力。使用光镊技术非接触捕获发生异质凝结的纳米颗粒,避免了机械臂与纳米颗粒的接触,进而提高了发生异质凝结的纳米颗粒受气流的曳力的测量精度。
附图说明
45.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
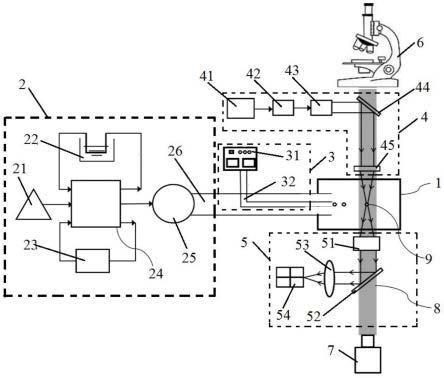
46.图1为本发明纳米颗粒受气流的曳力测量装置的结构示意图;
47.图2为本发明纳米颗粒受气流的曳力测量方法的流程图。
48.符号说明:
49.试验仓-1,气流产生部件-2,空气压缩机-21,控温水浴槽-22,湿度控制器-23,储气罐-24,流量计-25,空气输送管道-26,纳米颗粒产生部件-3,气溶胶发生器-31,颗粒输送管道-32,激光产生部件-4,激光控制器-41,激光器-42,光束扩展器-43,第一二向色分光片-44,显微物镜-45,探测部件-5,聚光镜-51,第二二向色分光片-52,透镜-53,位置探测器-54,显微镜-6,照明光源-7,照明光束-8,纳米颗粒-9。
具体实施方式
50.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
51.本发明的目的是提供一种纳米颗粒受气流的曳力测量装置及方法,使用光镊技术非接触捕获发生异质凝结的纳米颗粒,避免机械臂与颗粒的接触,进而提高气流对发生异质凝结纳米颗粒的曳力的测量精度。
52.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
53.实施例一
54.如图1所示,本发明纳米颗粒受气流的曳力测量装置包括:试验仓1、气流产生部件2、纳米颗粒产生部件3、激光产生部件4、探测部件5及曳力确定部件。
55.其中,气流产生部件2与所述试验仓1连通,气流产生部件2用于产生过饱和蒸汽气流,并将所述过饱和蒸汽气流送入所述试验仓1内。
56.具体地,所述气流产生部件2包括:储气罐24、流量计25及空气输送管道26。储气罐24用于储存过饱和蒸汽。流量计25与所述储气罐24连通,流量计25用于控制过饱和蒸汽气流的速度。空气输送管道26分别与所述流量计25及所述试验仓1连通,空气输送管道26用于将过饱和蒸汽气流输送至所述试验仓1内。在本实施例中,所述流量计25为高精度耐湿流量计25。所述空气输送管道26为耐湿空气输送管道26。
57.进一步地,所述气流产生部件2还包括控温水浴槽22、湿度控制器23以及空气压缩机21。控温水浴槽22与所述储气罐24连通,控温水浴槽22用于控制所述储气罐24内的温度。湿度控制器23与所述储气罐24连接,湿度控制器23用于控制所述储气罐24内的湿度。空气压缩机21与所述储气罐24连通,空气压缩机21用于压缩空气,并将压缩后的空气输送至所述储气罐24内,以控制所述储气罐24内过饱和蒸汽的压力。
58.在本实施例中,储气罐24为耐湿储气罐,存储特定温度、特定压力、特定湿度的过饱和蒸汽。控温水浴槽22为高精度控温水浴槽。湿度控制器23为高精度湿度控制器。储气罐24在空气压缩机21、控温水浴槽22及湿度控制器23的作用下,产生特定压力、温度、湿度的过饱和蒸汽,过饱和蒸汽在流量计25的控制下经空气输送管道26以一定速度进入到试验仓1中。
59.纳米颗粒产生部件3与所述试验仓1连通,纳米颗粒产生部件3用于产生纳米颗粒,并将所述纳米颗粒送入所述试验仓1内。
60.具体地,所述纳米颗粒产生部件3包括:气溶胶发生器31和颗粒输送管道32。气溶胶发生器31用于产生特定粒径、特定材质的气溶胶纳米颗粒。颗粒输送管道32分别与所述气溶胶发生器31及所述试验仓1连通,颗粒输送管道32用于将所述纳米颗粒送入所述试验仓1内。在本实施例中,颗粒输送管道32为防颗粒附着管道。
61.即气溶胶发生器31产生的纳米颗粒通过防颗粒附着管道进入到试验仓1中,纳米颗粒在试验仓1中随气流运动并发生异质凝结,经过光阱时被捕获。
62.激光产生部件4设置在所述试验仓1的一侧,激光产生部件4用于向所述试验仓1内发射第一激光,以在所述试验舱内产生光阱。所述试验仓1内的纳米颗粒被所述光阱捕捉,使得纳米颗粒9在所述试验仓1内悬浮。所述第一激光经过所述纳米颗粒后形成第二激光。
63.具体地,所述激光产生部件4包括:激光器42、激光控制器41及显微物镜45。激光器42用于产生第一激光。激光控制器41与所述激光器42连接,激光控制器41用于控制所述第一激光的波长及功率。显微物镜45设置在所述第一激光的光路上,显微物镜45用于将所述第一激光汇聚至所述试验仓1内,以形成光阱。
64.进一步地,所述激光产生部件4还包括光束扩展器43。光束扩展器43设置在激光器42和显微物镜45之间,且位于第一激光的光路上,光束扩展器43用于对第一激光进行扩展。
65.更进一步地,当激光器42与显微物镜45不在同一直线上时,激光产生部件4还包括第一二向色分光片44。第一二向色分光片44设置在所述光束扩展器43和显微物镜45之间,第一二向色分光片44用于调整所述第一激光的方向,使第一激光透射至显微物镜45处。
66.激光器42在激光控制器41的控制下产生特定波长及特定功率的两束第一激光,两束第一激光被第一二向色分光片44调整激光方向进入显微物镜45,汇聚于试验仓1的中心处,并在该位置产生一定强度的光阱。
67.探测部件5设置在所述试验仓1与所述激光产生部件4相对的一侧,探测部件5用于
探测第二激光,并根据所述第二激光确定所述纳米颗粒在所述试验仓1内的位置。
68.具体地,所述探测部件5包括:聚光镜51、透镜53及位置探测器54。所述聚光镜51设置在所述试验仓1与所述激光产生部件4相对的一侧,所述聚光镜51用于对第二激光进行整形,得到整形激光。所述透镜53设置在所述整形激光的光路上,所述透镜53用于将所述整形激光汇聚于所述位置探测器54的表面。所述位置探测器54用于探测微纳颗粒的位置信息。在本实施例中,所述位置探测器54为四象限位置探测器。
69.进一步地,当聚光镜51和透镜53不在同一直线上时,探测部件5还包括第二二向色分光片52。第二二向色分光片52设置在聚光镜51与透镜53之间,第二二向色分光片52用于调整所述整形激光的方向,使整形激光透射至透镜53处。
70.即第二激光进入聚光镜51被第二二向色分光片52调整激光方向进入透镜53汇聚后被四象限位置探测器探测。
71.在本实施例中,试验仓1对应激光产生部件4及探测部件5的两侧为透明壁,以使激光进入试验仓1内。
72.曳力确定部件分别与所述探测部件5及所述激光产生部件4连接,曳力确定部件用于根据所述纳米颗粒的位置、所述第一激光的功率,确定光阱对所述纳米颗粒的作用力,以确定所述过饱和蒸汽气流对所述纳米颗粒的曳力。
73.进一步地,本发明纳米颗粒受气流的曳力测量装置还包括显微镜6。显微镜6用于观测所述试验仓1内在过饱和蒸汽气流作用下发生异质凝结的微纳颗粒的粒径变化情况及外层液体的分布特征。
74.在本实施例中,显微镜6为高速显微观察镜。
75.曳力测量装置还包括照明光源7。照明光源7设置在试验仓1与探测部件5相同的一侧。照明光源7用于产生照明光束8。第一二向色分光片44和第二二向色分光片52还用于使照明光束8透射,以方便显微镜6观测。
76.具体的,照明光源7产生的照明光束8经过第二二向色分光片52、聚光镜51、显微物镜45及第一二向色分光片44,为显微镜6照明。
77.为了克服现有颗粒操控方法对发生异质凝结纳米颗粒外侧液体分布的影响,本发明采用光镊技术非接触捕获发生异质凝结的纳米颗粒,使两束第一激光聚集产生一定强度的光阱,光阱附近的伴随颗粒异质凝结随气流运动的纳米颗粒在光压的作用下会被束缚,过饱和蒸汽气流会对被束缚的伴随异质凝结纳米颗粒产生一定大小的曳力,而光镊产生的光阱对纳米颗粒的作用力随纳米颗粒所受曳力的变化而变化,曳力大小与气流速度、原始颗粒粒径、密度及发生异质凝后颗粒粒径、密度等参数有关,因此,基于磁散射模型计算光阱对颗粒的作用力,即可得到过饱和蒸汽气流对伴随异质凝结纳米颗粒的曳力。
78.如图2所示,本发明纳米颗粒受气流的曳力测量方法包括:
79.s1:通过气流产生部件向试验仓内输送过饱和蒸汽气流。
80.具体地,储气罐在空气压缩机、控温水浴槽、高精度湿度控制器的作用下,产生一定压力、温度、湿度的过饱和蒸汽,过饱和蒸汽在流量计的控制下以一定速度进入到试验仓中。
81.s2:通过纳米颗粒产生部件产生纳米颗粒,并将所述纳米颗粒送入试验仓内。
82.具体地,气溶胶发生器产生携带特定组分及特定粒径的纳米颗粒的气流,通过防
颗粒附着管道将纳米颗粒送入到试验仓内。纳米颗粒被过饱和蒸汽气流包围,纳米颗粒在过饱蒸汽环境中发生异质凝结,粒径增大。
83.s3:通过激光产生部件向试验仓内发射第一激光,以在所述试验舱内产生光阱。纳米颗粒被所述光阱捕捉,使得纳米颗粒在所述试验仓内悬浮。所述第一激光经过所述纳米颗粒后形成第二激光。
84.具体地,布置于试验仓外侧的激光器在激光控制器的作用下产生特定波长及特定功率的第一激光,第一激光经过一二向色分光片后经过显微物镜在试验仓中心处汇聚,并在该位置产生一定强度的光阱。激光波长根据颗粒组分及凝结工质组分而选取,要避开颗粒及凝结工质的吸收波段,避免激光被颗粒吸收而产生热,导致颗粒表面液体蒸发。
85.发生异质凝结的纳米颗粒在试验仓内经过光阱时,受到光压的作用被光阱捕捉。
86.关闭气溶胶发生器,调整过饱和蒸汽气流的速度,使被捕捉的纳米颗粒受过饱和蒸汽气流的动态曳力作用。凝结生长过程中纳米颗粒的质量不断增大,在过饱和蒸汽气流对纳米颗粒的曳力变化时,通过激光控制器调整第一激光的功率,使纳米颗粒持续被稳定捕捉。
87.s4:通过探测部件实时探测试验仓内纳米颗粒的位置。
88.s5:通过曳力确定部件根据纳米颗粒的位置、所述第一激光的功率,确定光阱对所述纳米颗粒的作用力,以确定所述过饱和蒸汽气流对所述纳米颗粒的曳力。
89.具体地,根据第一激光的功率、光阱强度、纳米颗粒的位置等数据,基于磁散射模型计算纳米颗粒受到光阱的作用力,进而得到过饱和蒸汽气流对伴随异质凝结纳米颗粒的曳力。
90.具体计算方法如下:
91.粒子在光阱收到光的散射力与梯度力两种作用力,气流对颗粒的作用力为光梯度力与散射力之差。将粒子看作是一个电偶极子,近似认为电场强度在粒子所处的小空间范围内不变,对于粒径为d的颗粒,散射力f
scatt
可以表示为:
[0092][0093]
其中,i0为入射光强,nm为粒子周围介质的折射率,c是真空中的光速。σ表示颗粒的散射截面积:
[0094][0095]
其中,m为粒子折射率与周围气体折射率之比,λ为激光波长。
[0096]
梯度力f
grad
为:
[0097][0098]
其中,α为颗粒的极化率:
[0099][0100]
气流对颗粒的曳力为:
[0101]
f=f
grad-f
satt
。
[0102]
此外,曳力测量方法还包括:
[0103]
s6:使用显微镜实时观测的纳米颗粒的粒径以及在气流作用下外侧液体的分布。
[0104]
s7:改变纳米颗粒的原始尺寸、过饱和蒸汽气流的湿度、速度等参数,确定各参数下过饱和蒸汽气流对伴随异质凝结纳米颗粒曳力的影响规律。
[0105]
本发明提出一种基于光镊的伴随异质凝结的纳米颗粒受气流的曳力测量方法,使用光镊系统在试验仓内创造一定强度的光阱,实现非接触捕捉随气流运动且发生异质凝结的纳米颗粒,激光功率随气流对颗粒曳力的变化而动态调整,基于磁散射模型实时计算光阱对颗粒的作用力,即为气流对颗粒的曳力。实现了对伴随异质凝结纳米颗粒受气流曳力的非接触测量,克服传统方法对颗粒外侧液体分布及气流随颗粒曳力产生影响,进而导致曳力测量不准确的问题。
[0106]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
[0107]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1