一种基于多线激光雷达的水下目标多点同步探测方法
1.本发明涉及激光雷达探测技术领域,涉及水下目标探测,具体涉及一种基于多线激光雷达的水下目标多点同步探测方法。
背景技术:
2.海洋中存在着丰富的资源,水下环境探测是海洋资源开发与保护的基础。目前常用的探测方式为水声探测,但是探测精度不高。激光雷达与水声探测相比能有更优的定位精度,而且海水中蓝绿光作为透光窗口的发现,使得基于蓝绿激光的雷达技术开始应用于水下目标探测领域。
3.水下探测的目标既有静止物体,同时也包含非静止物体。物体的移动性以及海洋环境的复杂多变特性,给激光雷达探测技术带来了巨大的挑战。以往的激光雷达探测技术每次只能获取目标一个点的信息,通过扫描的方式可获取静止目标一个面的信息,却难以完成对非静止目标一个面的信息获取。
4.目前的激光雷达探测技术主要存在以下问题:
5.一是单点的激光雷达探测,每次只能得到目标某个点的距离值,不能获取整体信息;
6.二是激光雷达扫描探测,由于多个扫描点之间存在时间差,不能同时获取目标一个面的信息,难以准确还原目标三维信息。
技术实现要素:
7.为解决上述问题,本发明提出一种基于多线激光雷达的水下目标多点同步探测方法,这种方法能够同时对水下目标的多个点进行探测,能够实现多个目标探测点与回波信息的对应,一次性获取目标一个面的位置信息,在保证高精度的前提下完成对目标三维信息还原。
8.本发明解决其技术问题所采用的技术方案是:
9.一种基于多线激光雷达的水下目标多点同步探测方法,包括如下步骤:
10.s1.在发射端设置激光发射阵列(m
×
n),m表示阵列的行数,n表示阵列的列数,一个激光发射阵列由多个激光发射阵元组成;信号发生器产生mn个频率不同的调制信号,分别调制到各个激光发射阵元,激光发射阵列排布位置与调制信号的频率值有固定的对应关系;
11.搭建目标探测系统的发射和接收模块:
12.在发射端设置激光发射阵列,接收端设置一个光学接收系统;发射端的信号发生器产生特定频率不同的多个调制信号,将各个特定频率的调制信号调制到不同位置的激光发射阵元上,激光照射到目标以后,光学接收系统接收经过目标反射回来的回波信号;开始测距时,激光发射阵列中的所有激光发射阵元同时、同步发出光束,接收端一次性获取所有目标点的回波信息;
13.s2.获取参考信号和测量信号:每个激光发射阵元均采用相位式激光测距方式,得到mn路下变频的参考信号以及包含mn个频率分量的一路下变频的测量信号;
14.s3.计算每一路参考信号和测量信号的相位值,进而获得mn个相位差值;
15.s4.计算距离值:利用s3得到的mn个相位差值可以计算出mn个距离值,每个距离值对应激光发射阵列的某个激光发射阵元,由此可以同时获得目标一个面的位置信息。
16.s3中,相位的计算是根据采样频率、采样点数、各路参考信号的信号频率和测量信号各个有效分量的信号频率进行傅里叶变换,计算特定频率的相位值。
17.本发明的优点或有益效果:
18.1.将单点的激光雷达系统改进为多点探测,可以获取目标多个位置的信息,得到目标一个面的信息;
19.2.所有的激光束同时、同步发射,得到的多点信息不存在时间差,可以避免目标运动带来的影响;
20.3.设定频率值不同的多个调制信号,接收端可以一次性处理所有的回波信号,不会产生混乱,在保证精度的同时可以提高处理速度。
附图说明
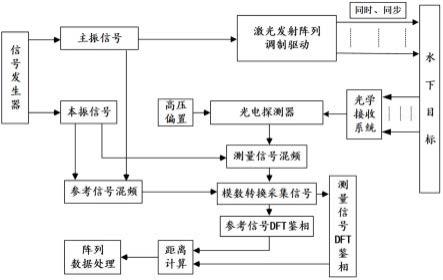
21.图1为实施例中基于多线激光雷达的水下目标多点同步探测流程图;
22.图2为实施例中基于多线激光雷达的水下目标多点同步探测测量信号图;
23.图3为实施例中基于多线激光雷达的水下目标多点同步探测相位差图。
具体实施方式
24.下面结合附图和实施例对本发明内容作详细描述,所述实施例的示例在附图中示出。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
25.实施例:
26.如图1所示,一种基于多线激光雷达的水下目标多点同步探测方法,包括如下步骤:
27.步骤1,发射端激光设置,使用激光发射阵列(3
×
2),信号发生器产生6个主振信号:190.001mhz、190.002mhz、190.003mhz、190.004mhz、190.005mhz和190.006mhz,分别调制到6个激光发射阵元,开始测距时,所有的激光发射阵元同时、同步发出光束,目标上同时出现多个探测点;
28.步骤2,获取参考信号和测量信号:信号发生器产生190.007mhz的信号作为本振信号,使其与所有的调制信号同时进行混频及滤波以得到6路下变频信号,频率值分别为:6khz、5khz、4khz、3khz、2khz和1khz,将这6路下变频信号作为参考信号;
29.接收端的光学接收系统聚光透镜收集回波信号汇聚到光电探测器上,转化为电信号后与本振信号进行混频及滤波得到一路下变频信号,将这一路下变频信号作为测量信号,这路信号是多种频率叠加后的混合信号,其中必定包含6个频率分量,这些分量中每一个都与步骤2中的唯一一路参考信号频率相同,这些是有效分量;如图2所示,信号中包含了1-6khz的六个频率分量;
30.步骤3,计算每一路的参考信号和测量信号的相位值,通过模数转换对步骤2产生的参考信号和测量信号进行采样得到信号的离散值,其中,6个参考信号各采样一次,1个测量信号采样6次;每一路参考信号都与测量信号进行一次同时、同步、整周期采样;设置6khz参考信号与测量信号的采样频率为60khz,5khz的采样频率为50khz,4khz的采样频率为40khz,3khz的采样频率为30khz,2khz的采样频率为20khz,1khz的采样频率为10khz,采样点数均为500个;
31.相位式激光测距的实施方法为:信号发生器产生主振信号和本振信号,主振信号和本振信号均分为两路,第一路主振信号调制到激光发射阵元上,激光照射到目标后,由光学接收系统聚光透镜和光电探测器接收回波信号;将回波信号与第一路本振信号混频,滤波后得到下变频的测量信号;将第二路主振信号与第二路本振信号混频,滤波后得到下变频的参考信号;通过鉴相器计算出测量信号和参考信号的相位差,再利用相位差计算距离。
32.对参考信号进行处理得到相位信息,对6路采样得到的离散信号进行离散傅里叶变换(discrete fourier transform,简称dft),根据采样频率、采样点数、信号频率找到对应的频谱点,然后计算特定频率的相位值作为初相位;每一路信号都作相同的处理,各路信号之间只有频率值不同;
33.对测量信号进行处理得到相位信息,对6路采样得到的离散信号进行离散傅里叶变换,根据采样频率、采样点数、各个有效分量的信号频率找到对应的频谱点,然后计算特定频率的相位值作为初相位;每一个信号分量都作相同的处理,各个分量之间只有频率值不同;
34.步骤4,根据相位值计算距离,步骤3获得了6个不同频率参考信号的初相位和6个不同频率测量信号分量的初相位,频率值相同的参考信号和测量信号是一一对应的关系,如图3所示,以5khz信号为例,参考信号与测量信号之间存在相位差,两者相减可以得到一个相位差值,总共获得了6个相位差值,进而可以计算出6个距离值,最后进行阵列数据处理,每个距离值对应激光发射阵列的某个阵元,还原出水下目标一个面的位置信息。
35.经过上述步骤,可以通过多线激光雷达系统获取水下目标一个面的位置数据。
36.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的保护范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1