基于改进MRF的GM-APD阵列激光雷达成像重构方法、设备、存储介质和程序产品
本技术涉及激光成像,尤其涉及gm-apd阵列激光雷达成像。
背景技术:
1、gm-apd激光成像雷达为单光子成像,探测器灵敏度高,受背景光影响较大,当背景光较强时,其成像质量受限。特别是当选通门内的信号光子数与噪声光子数比值(信背比)低于0.01时,其重构难度十分大,对于信号和背景噪声的区分也十分困难。目前低信噪比回波数据的重构主要使用数据增强手段,稀疏重建,空间叠加等,再提取峰值,得到距离和强度信息,通过峰值强度的阈值进行信号和背景像素点的区分,认为目标回波强于背景噪声,在低信背比情况下,背景噪声水平高,同时强度信息存在一定的随机性,导致峰值强度阈值无法区分信号和背景噪声。
技术实现思路
1、本发明目的是为了解决在低信背比情况下,峰值强度阈值无法区分信号和背景噪声的问题,提供了基于改进mrf的gm-apd阵列激光雷达成像重构方法、设备、存储介质和程序产品。
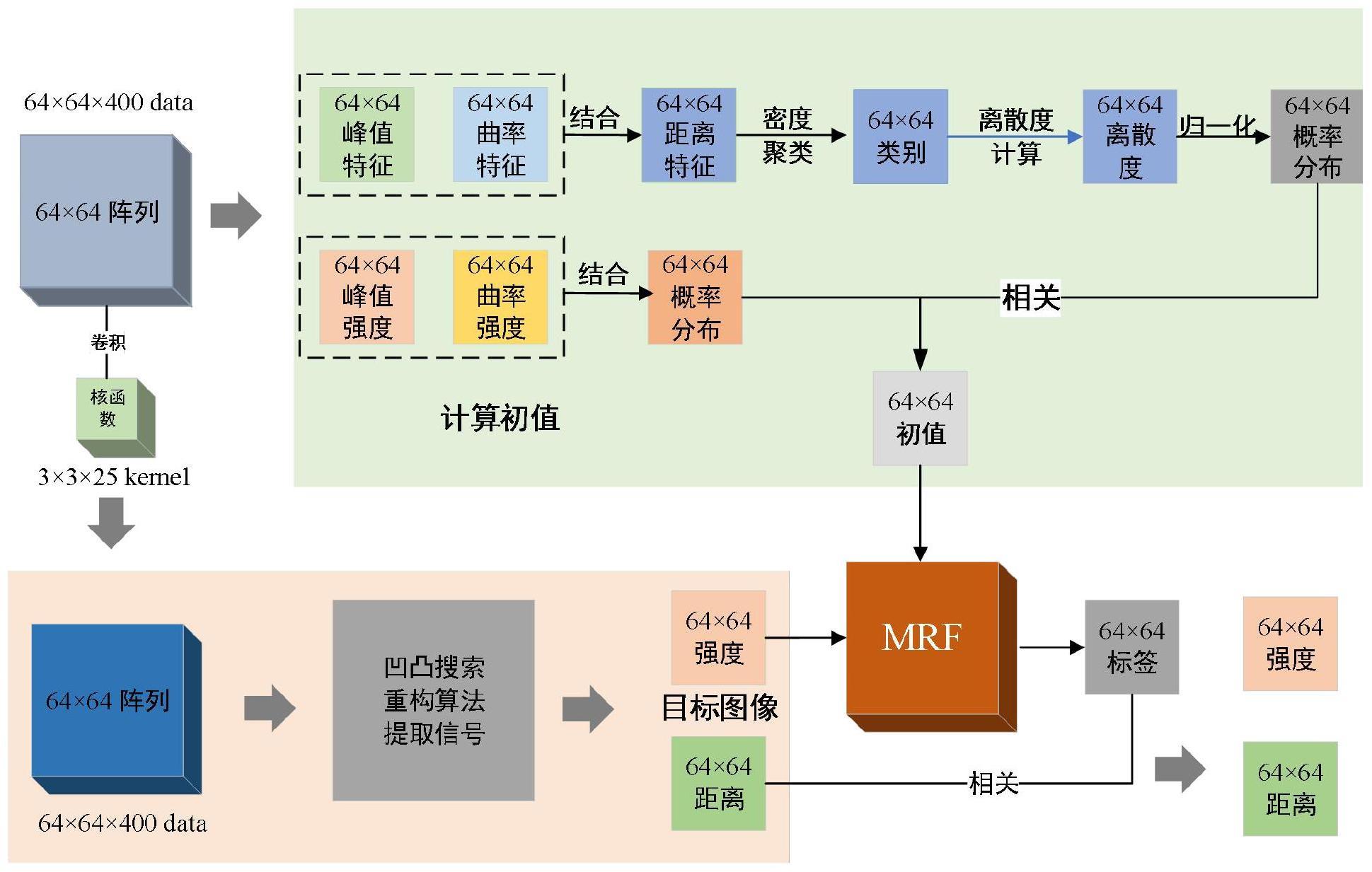
2、本发明是通过以下技术方案实现的,本发明一方面,提供一种基于改进mrf的gm-apd阵列激光雷达成像重构方法,所述方法包括:
3、获取探测器回波数据统计得到的触发直方图y;
4、根据所述触发直方图y,提取峰值特征与曲率特征;
5、根据所述峰值特征与曲率特征,获取特征融合距离像和特征融合强度像;
6、根据所述特征融合距离像和特征融合强度像,获取目标噪分布初值;
7、对强度像进行均匀处理,获取观测图像;
8、将所述目标噪分布初值和所述观测图像输入马尔科夫随机场得到重构图像。
9、进一步地,所述根据所述触发直方图y,提取峰值特征与曲率特征,具体包括:
10、根据所述触发直方图y,并利用如下的特征提取公式:
11、rng(ip,jp)=argmax(y(ip,jp))
12、rng'(ip,jp)=argmin(y”(ip,jp))
13、cnt(ip,jp)=max(y(ip,jp))
14、cnt'(ip,jp)=y(ip,jp,argmin(y”(ip,jp)))
15、其中,rng为峰值特征得到的距离像,cnt为峰值特征得到的强度像,rng‘为曲率特征得到的距离像,cnt‘为曲率特征得到的强度像,ip为阵列像素的横坐标,jp为阵列像素的纵坐标,y为探测器回波数据统计得到的触发直方图,y”是y的二阶导数;
16、提取峰值特征与曲率特征。
17、进一步地,所述融合距离的获取方法,具体包括:
18、使用点对点相关性,两个特征下的距离值,判断各自特征得到的距离差与允许误差距离半径eps的大小,得到特征融合距离像rngnew,具体包括:
19、|rng(ip,jp)-rng'(ip,jp)|<eps
20、当满足条件时,可以求得特征融合距离像的距离值:
21、
22、当距离差大于参数eps时:
23、|rng(ip,jp)-rng'(ip,jp)|≥eps
24、利用其邻域空间点计算距离半径rp:
25、
26、其中,np为邻域有距离值点的个数,dp为邻域距离值与中心点距离值的差值数组,按照差值从小到大排列;
27、通过判断邻域计算距离半径与eps的关系得到融合距离像的距离值:
28、rngnew(ip,jp)=noise|rp>eps
29、rngnew(ip,jp)=argmin||rp||。
30、进一步地,所述特征融合强度像的获取方法,具体包括:
31、使用点对点相关性,两个特征下的强度值,判断各自特征得到的强度差与允许误差强度半径ceps的大小,得到特征融合距离像cntnew:具体包括:
32、|cnt(ip,jp)-cnt'(ip,jp)|<ceps
33、当满足条件时,可以求得特征融合强度像的强度值:
34、
35、当强度差大于参数ceps时:
36、cnt(ip,jp)-cnt'(ip,jp)≥ceps
37、利用其邻域空间点计算强度半径cp:
38、
39、其中,cnp为邻域有强度非0值点的个数,dcp为邻域强度值与中心点强度值的差值数组,按照差值从小到大排列;
40、通过判断邻域计算强度半径与ceps的关系得到融合强度像的强度值:
41、cntnew(ip,jp)=0|cp>eps
42、cntnew(ip,jp)=argmincp。
43、进一步地,所述根据融合距离像和强度像,获取目标噪分布初值,具体包括:
44、对融合距离像rngnew进行密度聚类,得到类别q=[q1,q2,...qi,...qq],对于每个类别qi的类别中心其中x,y分别为类别内像素的横纵坐标值,由此各个类别的离散度为:
45、
46、将离散度转换为类别概率公式为:
47、
48、结合融合强度像cntnew(ip,jp)转换为0-1概率分布,两者相乘得到最终概率图:
49、p(qfin)=p(q)*cntnew(ip,jp)
50、对p为0的点label设置为噪声点,其他点设置为目标点,得到目标噪分布初值i0。
51、进一步地,所述对强度像进行均匀处理,获取观测图像,具体包括:
52、使用数据处理手段对强度像进行均匀处理,具体包括:
53、y'=∑w*y
54、其中,y’为预处理后的触发直方图,y为原始直方图,w为空间核函数,大小为a×a×b,y与w进行卷积预处理;
55、对预处理后的触发直方图y‘使用凹凸搜索算法进行信号提取及预处理工作,得到观测图像x,同时得到和mrf输出结果做相关处理的距离像rngfinal和强度像cntfinal。
56、进一步地,所述将所述目标噪分布初值和所述观测图像输入马尔科夫随机场得到重构图像,具体包括:
57、观测图像x的每个像素对应场景的标签label为i=[i1,i2,...ii,...in],像素总数n=64×64=4096,其中ii=[label1,label2,...labeli,...labelm],m为类别数,p(i)为i的概率分布;当前图像x=[x1,x2,...xi,...xn],其中x为观测图像;确定最终迭代得到的i的最大概率结果,即求其条件概率:
58、i=argmax(p(i|x))
59、由贝叶斯理论:
60、
61、p(i)使用gibs随机场概率,其概率值由初值及迭代过程决定,将第一步的初值i0带入下面公式进行计算p(i)和p(x|i):
62、
63、其中,z为归一化因子,t控制p的分布形态,c为所有势团集合,φc(i)为势能;
64、
65、其中,β为耦合系数;p(x|i),认为每个label为高斯分布,均值方差用目标函数中的label对应值进行计算;
66、
67、p(x|labeli)~gaussian(u,σ2)
68、联合最大概率为
69、i=argmax(p(x|i)+p(i))
70、每次计算联合最大概率,得到迭代更新的i,多次迭代后,得到稳定的i,为最终i的结果;将i的结果与y经过预处理后的y‘,进行凹凸搜索信号提取得到的距离像rngfinal和强度像cntfinal进行相关计算,得到最终重构的距离像和强度像。
71、第二方面,本发明提供一种计算机设备,包括存储器和处理器,所述存储器中存储有计算机程序,当所述处理器运行所述存储器存储的计算机程序时执行如上文所述的一种基于改进mrf的gm-apd阵列激光雷达成像重构方法的步骤。
72、第三方面,本发明提供一种计算机可读存储介质,所述计算机可读存储介质中存储有多条计算机指令,所述多条计算机指令用于使计算机执行如上文所述的一种基于改进mrf的gm-apd阵列激光雷达成像重构方法。
73、第四方面,本发明提供一种计算机程序产品,所述计算机程序被处理器执行时实现如上文所述的一种基于改进mrf的gm-apd阵列激光雷达成像重构方法。
74、本发明的有益效果:
75、首先,本发明基于改进马尔科夫随机场中的初值和目标图像,实现更准确和更快的类别计算;
76、其次,通过目标和背景的类别区分提高重构图像的信噪比。
77、本发明的方法在低信背比情况下,可以提升gm-apd激光雷达重构图像的信噪比。
78、1.利用不同距离特征结合得到更准确的距离像分布,其次利用距离值较强度值更稳定的方式得到目标分布概率,最后利用距离强度结合得到更可靠的目标分布概率图,由此得到马尔科夫随机场的初值。
79、2.对目标图像上,利用空间相关性进行预处理,再使用凹凸搜索进行信号提取,得到均匀性好的距离像和强度像。
80、3.将初值带入马尔科夫随机场进行像素点概率计算,利用输出的类别图,得到高信噪比的距离像和强度像。
81、本发明适用于geiger mode-avalanche photodiode(gm-apd)激光成像雷达低sbr(signal background radio)回波数据的提取及目标重构,具体用于提高重构三维像的图像信噪比。
- 还没有人留言评论。精彩留言会获得点赞!