一种基于无人船的水下测量系统及其方法
本发明属于水下测量,具体涉及一种基于无人船的水下测量系统及其方法。
背景技术:
1、水利工程设计基础资料来源于测量资料,水下地形测量的精确性与水利工程的投资估算、施工方案的合理性有着密切的关系。随着水利建设步伐的加快,水下地形测量的精确性和快速性已成为制约水利工程建设速度的关键环节。传统测绘领域水下地形测量需要耗费大量的人力、物力等资源,水下测量设备复杂、庞重,测量人员不愿意携带或测量水域没有船只、大船无法靠岸测量等原因,在近年,曾出现多起由于水下地形测量不够准确导致抛石量发生重大变化、导致设计出现重大变更的情况。
2、遥控测量船的出现,是因为近年无线传输技术、定位技术和自动导航技术的迅猛发展,因此遥控测量船成为各大企业竞相研制的产品。无人测量船不再需要那么多人力,仅仅需要两到三个人在岸上操控仪器。遥控测量船也就是无人船技术的问世,使得各大公司相继推出相应产品,在很多领域应用,主要为:水域调查、航道测量、危险水域水下测量等。并且都取得了一定的经济效益。
3、现有技术存在以下的问题:
4、1)现有的基于无人船的水下测量技术,大多基于单体无人船进行数据采集、数据处理、数据存储以及一对一人工现场遥控方式进行水下测量,例如,cn201820629514.7的一种基于无人船的水下测量系统,这种方式人力成本投入大,工作人员的工作量大,并且受限于环境因素影响,一些危险、复杂环境导致工作人员无法根据实际现场对无人船进行遥控,该系统实用性低,对环境适应性差;
5、2)现有技术大多采用传统的rtk实时动态载波相位差分定位技术对无人船进行定位,例如,cn202010240776.6的一种无人机无人船协同导航方法,这种方式具有数据传输距离和数据传输方式限制,导致无人船位置误差较大,得到的水下测量数据的准确性低。
技术实现思路
1、为了解决现有技术存在的单体无人船人力成本投入大,工作人员的工作量大,系统实用性低,对环境适应性差,传统的rtk定位技术具有数据传输距离和数据传输方式限制的问题,本发明目的在于提供一种基于无人船的水下测量系统及其方法。
2、本发明所采用的技术方案为:
3、一种基于无人船的水下测量系统,包括若干无人船、若干遥控基站以及数据中心,若干无人船分别设置于测量流域内的对应预设测量点处,且每个无人船均与当前流域内的对应遥控基站通信连接,若干遥控基站均与数据中心通信连接,数据中心通信连接有外部的连续运行参考站子系统和若干移动终端;
4、数据中心,用于根据若干预设测量点的位置数据、设置有无人船和遥控基站的若干流域的河流地形数据进行无人船航迹线规划,调用连续运行参考站子系统获取每个无人船的差分修正数据,将生成的航迹线路径和无人船的差分改正数据通过对应流域内的遥控基站广播至所有的无人船,对所有遥控基站上传的对应流域的水下测量数据进行数据处理,得到水下地形三维坐标数据并进行可视化,接收移动终端发送的控制指令并通过遥控基站发送至对应的无人船;
5、遥控基站,用于向信号覆盖范围内流域的无人船传输数据中心发送的控制指令、航迹线路径以及无人船的差分修正数据,并向数据中心发送无人船上传的水下测量数据;
6、无人船,用于根据数据中心发送的无人船的差分修正数据和航迹线路径进行巡航测量,并对原始的水下测量数据进行预处理,并将预处理后的水下测量数据通过遥控基站上传至数据中心。
7、进一步地,无人船包括船体,设置于船体内部的遥控导航子系统、推进子系统、发电子系统、控制子系统以及测量子系统,控制子系统与当前流域内的遥控基站通信连接,且控制子系统分别与遥控导航子系统、推进子系统、发电子系统以及测量子系统电性连接。
8、进一步地,控制子系统包括主控模块、电源模块、电源控制模块、驱动控制模块以及无线通信模块,主控模块分别与遥控导航子系统、测量子系统、电源模块、电源控制模块、驱动控制模块以及无线通信模块电性连接,电源控制模块分别与电源模块和发电子系统电性连接,驱动控制模块与推进子系统电性连接,无线通信模块与当前流域内的遥控基站通信连接;
9、测量子系统包括数据预处理模块、传感器模块、障碍物测量模块、深度定位模块以及经纬定位模块,数据处理模块分别与控制子系统的主控模块、传感器模块、障碍物测量模块、深度定位模块以及经纬定位模块电性连接。
10、进一步地,数据中心包括数据处理服务器和分布式设置的若干数据存储服务器,数据处理服务器分别与分布式设置的若干数据存储服务器的控制总线、若干遥控基站、外部的连续运行参考站子系统以及若干移动终端通信连接。
11、进一步地,数据处理服务器设置有中央处理器、网络模块、航迹线规划模块、差分数据计算模块、测量数据处理模块、数据可视化模块以及存储管理模块,中央处理器分别与网络模块、航迹线规划模块、差分数据计算模块、测量数据处理模块、数据可视化模块以及存储管理模块连接,网络模块分别与若干遥控基站、外部的连续运行参考站子系统以及若干移动终端通信连接,存储管理模块与分布式设置的若干数据存储服务器的控制总线连接;
12、航迹线规划模块设置有航迹线规划模型,差分数据计算模块设置有差分数据计算模型,测量数据处理模块包括平面坐标数据处理子模块和高程坐标数据处理子模块,平面坐标数据处理子模块设置有平面坐标数据处理模型,高程坐标数据处理子模块设置有高程坐标数据处理模型。
13、一种基于无人船的水下测量方法,基于水下测量系统,包括如下步骤:
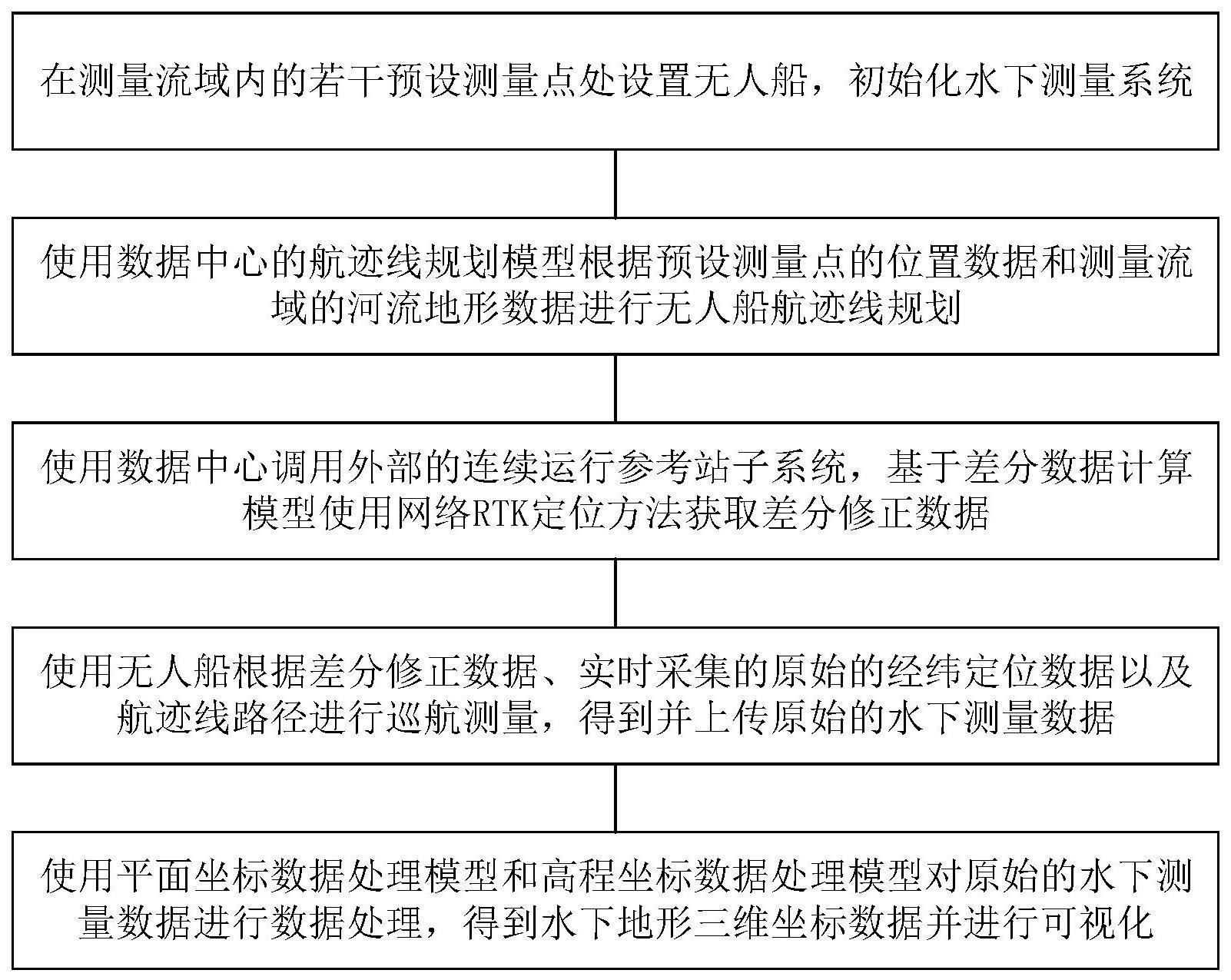
14、在测量流域内的若干预设测量点处设置无人船,初始化水下测量系统;
15、使用数据中心的航迹线规划模型根据预设测量点的位置数据和测量流域的河流地形数据进行无人船航迹线规划,得到并发送航迹线路径至对应的无人船;
16、使用数据中心调用外部的连续运行参考站子系统,基于差分数据计算模型使用网络rtk定位方法获取差分修正数据,并将差分修正数据发送至对应的无人船;
17、使用无人船根据差分修正数据、实时采集的原始的经纬定位数据以及航迹线路径进行巡航测量,得到并上传原始的水下测量数据;
18、使用数据中心的平面坐标数据处理模型和高程坐标数据处理模型对接收的原始的水下测量数据进行数据处理,得到水下地形三维坐标数据并进行可视化。
19、进一步地,航迹线规划模型使用改进灰狼优化elman神经网络算法进行全覆盖路径规划,全覆盖路径规划的目标函数公式为:
20、
21、式中,g为全覆盖路径规划的目标函数;f(*)为输出层的激活函数;r为路径覆盖率;p为改进灰狼优化算法igwo输出最优解概率;sa为当前流域河流地形数据构成的栅格地图中已经覆盖的区域面积;s为当前流域河流地形数据构成的栅格地图中的所有区域面积;s0为当前流域河流地形数据构成的栅格地图中障碍物的区域面积;vl为无人船行驶速度;vl为无人船转向速度;di为全覆盖路径规划长度;ac为碰撞补充参数;i为参数指示量;
22、igwo算法的公式为:
23、
24、式中,x(t+1)为t+1时刻人工灰狼进行猎捕活动移动的位置;x1、x2、x3、xω分别为最优领导者狼α、β、δ以及随机狼ω的位置;d1、d2、d3、dω分别为人工灰狼到α、β、δ、ω狼的距离;a1、a2、a3、aω均为收敛影响系数向量,由收敛因子a决定;w1、w2均为位置定位系数,w1=w·r,w2=(1-w)·r,w为位置定位因子,根据迭代次数决定且与迭代次数负相关,且w∈(0,1],r为[0,1]之间的随机数;i为参数指示量;t为当前迭代次数。
25、进一步地,原始的水下测量数据包括修正后的经纬定位数据和原始的水深定位数据,进行巡航测量,包括如下步骤:
26、使用无人船的经纬定位模块实时采集原始的经纬定位数据;
27、根据数据中心发送的差分修正数据对原始的经纬定位数据进行数据修正,得到当前时刻无人船修正后的经纬定位数据;
28、根据无人船修正后的经纬定位数据,控制无人船按照航迹线路径进行巡航测量,得到并上传原始的水下测量数据;
29、使用障碍物测量模块检测无人船前进方向上的障碍物数据,并根据障碍物数据对航迹线路径进行实时路径修正。
30、进一步地,对接收的原始的水下测量数据进行数据处理,包括如下步骤:
31、使用平面坐标数据处理模型对修正后的经纬定位数据进行高斯正反算和坐标转换,得到对应的平面坐标数据;
32、使用高程坐标数据处理模型根据平面坐标数据和差分修正数据对原始的水深定位数据进行纠正、滤波、圆滑处理以及投影转换,得到水下地形三维坐标数据;
33、根据水下地形三维坐标数据进行可视化。
34、进一步地,高程坐标数据处理模型使用二次曲面-igwo-rbf神经网络算法进行高程转换。
35、本发明的有益效果为:
36、本发明提供的基于无人船的水下测量系统及其方法,采用若干无人船、若干遥控基站以及数据中心实现智能航迹线规划、数据传输以及远程控制,能够同时实现多流域水下测量、多无人船控制、大量数据传输和处理工作,大大的降低了人力成本投入和工作人员的工作量,该系统实用性高,并且对危险、复杂环境的适应性好,同时基于连续运行参考站子系统使用网络rtk定位方法获取无人船精确的定位数据,使无人船能够按照航迹线路径进行自动巡航测量,大大提高了水下测量数据的准确性,在数据中心进行数据处理和可视化,能够直观的分析水下测量结果。
37、本发明的其他有益效果将在具体实施方式中进一步进行说明。
- 还没有人留言评论。精彩留言会获得点赞!