一种水下机器人的浮标式短基线水下定位系统的方法
本发明涉及浮标式短基线水下定位,具体为一种水下机器人的浮标式短基线水下定位系统的方法。
背景技术:
1、在水下机器人工作中,水下定位精度是一个非常重要的指标,但由于很难确定海水基准点,因此长期以来使用理论分析精度,尚无具体的应用案例和分析。本发明属于水下机器人控制领域,具体来说是一种基于短基线组网的深海导航定位系统及方法。
2、根据基阵的基线长度,水下声学定位系统一般划分为长基线定位系统(lbl)、短基线定位系统(sbl)和超短基线定位系统(usbl)三种。长基线定位系统一般包括水下应答机(或浮筒)基阵、定位载体上的应答机、定位载体上的数据处理和控制系统、深度传感器等。本系统通过测量接收和发出信号两端的传输时间,并与水文信息估算测得的速度相结合,得出目标与基阵之间的伪距,从而建立一个非线性方程,求出目标位置信息,所得的结果是待定位目标相对于基阵的相对坐标,如果应答器基阵的绝对地理位置提前确定,就可以在地面坐标系统中准确地定位目标载体。
3、超短基线定位系统中的声头由一个发射传感器和若干个水听器组成,它的长度可以从几公分到数十公分不等。在定位时,通常在船体底部或小型水面母船侧面等噪声扰动较小的地方设置声头。由于超短基线定位系统的基阵尺寸太小,无法采用传统的脉冲包络检波法进行定位测量,必须采用相位比较和相位差法,通过测量信号的相位差,确定了基阵坐标系统中信号源(或应答器)的位置,从而能够准确定位。
4、在长基线定位系统中,通常会将多个水听器基元设置在水下几米区域内或水底,每个基元之间的间距都超过一百米。通常在大面积水域内采用长基线定位法,从而获得的定位精度相对较高,但需要耗费大量时间布置和回收海面或海底声基阵;声基阵的数目很多,造价也很高;这个系统结构太过繁琐,而且不易操作。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种水下机器人的浮标式短基线水下定位系统的方法,具备易于安装布放和高精度的定位。它无需组建大规模水下声基阵,系统构成简单,基阵的布放、回收、使用与维护方便,使得关于短基线定位系统的研发与附加费用较为低廉。水下声基阵在布放时,具有良好的几何构型与较高的安装精度,实现测距精度高的同时。系统整体不需要大量的校准工作优点,解决了但需要耗费大量时间布置和回收海面或海底声基阵;声基阵的数目很多,造价也很高;这个系统结构太过繁琐,而且不易操作的问题。
3、(二)技术方案
4、为实现上述易于安装布放和高精度的定位。它无需组建大规模水下声基阵,系统构成简单,基阵的布放、回收、使用与维护方便,使得关于短基线定位系统的研发与附加费用较为低廉。水下声基阵在布放时,具有良好的几何构型与较高的安装精度,实现测距精度高的同时。系统整体不需要大量的校准工作目的,本发明提供如下技术方案:
5、一种水下机器人的浮标式短基线水下定位系统的方法,包括以下步骤:
6、s1、建立测阵网点分布图
7、通过网点浮标上的定位仪确定其经度、纬度和高度;再通过听声器在海域海面布置测阵网点,基阵形式为水岸布放;同时测阵网点按照正方型分布于海域内,使点阵形成正方型阵列;并且使任意两个测阵网点在彼此作用距离之内,并对每一个测阵网点进行标定确认该测阵网点的绝对大地坐标值;由于浮标位置已知,可得到水听器坐标位置;
8、s2、水下机器人的利用
9、水下机器人通常采用安装的换能器发射信号,水下机器人设置的测阵声纳,发出声脉冲声源信号到水案测阵点应答器,水案测阵点应答器回应应答信号给水下机器人,这样浮标式短基线水下定位系统通过测量水声信号在水下机器人与各步骤s1中听声器间的传播时(即斜距)延差解算其坐标信息,通过声源的声传播所需时间来计算水下机器人或水下航行器的距离和方位;
10、s3、建立系统模型
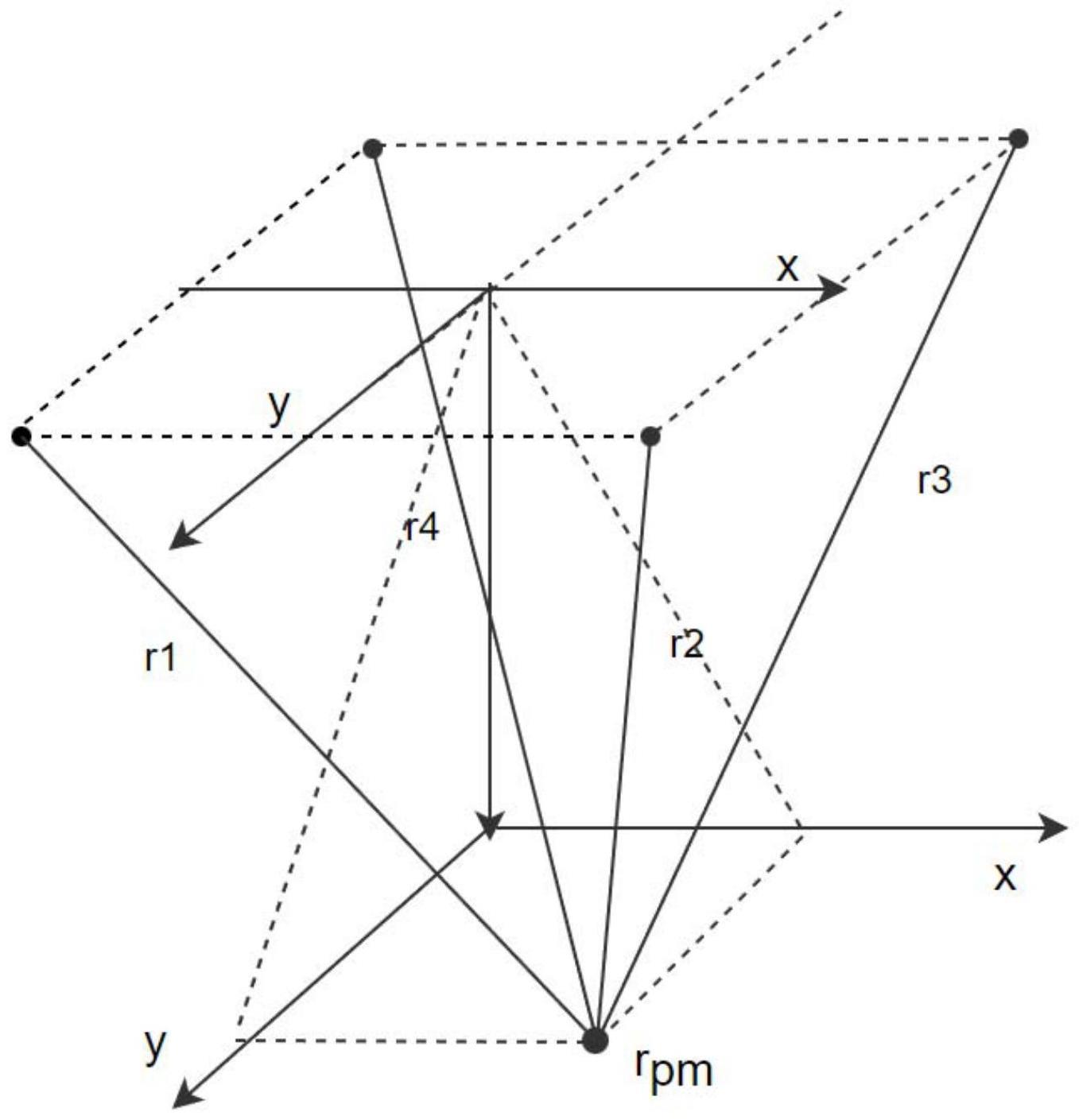
11、将水面浮标设置在水域后,建立基阵坐标系,原点为浮标的中心,在基阵平面内,x轴表示东方向,y轴表示南方向,z轴表示与x0y平面相垂直指向水深的方向。在此模型中,水下机器人上安装的发射换能器在0时刻发出位置信号,c表示水中的速度,在时间ti处到达第i个应答器。水下机器人上与第i个应答器间的距离为rim(i=1,,,);
12、s4、实现途径
13、接收采集水声定位信号以及测量浮标基阵所在的位置,都是水面部分的主要任务,这些组件都设置在浮标体上,它包括接收采集信号系统、gps接收机和数据处理中心。水下系统涵盖信号传输系统、数据处理和驱动控制中心等,它们相互连接包裹在具有良好密闭性的机械外壳中,然后在水下机器人身上进行固定。
14、优选的,所述步骤s3中,在进行水下定位时,根据其工作模式,可以将其划分为球面交叉模式和双曲面交汇模式[3]。在接收和发出信号同步时,一般采用球面交汇模型,也就是要实现水下机器人和水听器基阵的时间同步。可以将球面交叉模型表示为:
15、δx2+δy2+δz2=c2t2。
16、优选的,所述步骤s3中,最小二乘法是一种曲线拟合,是一种无偏定位算法,不依赖于外部条件的影响。接下来求解可以选择最小二乘法,得到在短基线坐标系统中的声源位置测量结果:
17、rpm=[xpmypmzpm]。
18、优选的,所述步骤s3中,4个斜距的测量值应满足:
19、
20、
21、
22、
23、上式不难演化为:
24、设
25、优选的,所述步骤s2中,
26、和
27、以及未知的列矢量:
28、
29、k=bp也就是(btb)-1btk=(btb)-1btbp
30、这样
31、p=(btb)-1btk
32、于是就可解得
33、xpm=p(1)
34、ypm=p(2)
35、zpm=p(3)
36、综合可得,
37、
38、得到声源在在短基线坐标系中位置的测量值
39、rpm=[xpmypmzpm]。
40、优选的,所述步骤s4中,具有以下详细的工作流程:
41、(1)采用gps接收装置将水面浮标置于待测水域,按一定阵形布置,并在水下2米处形成布置水听器基阵,并获得地面坐标系统中gps基阵的位置;
42、(2)通过在浅水区安装水下机器人,对gps浮标基阵和水下机器人的时钟进行校准,auv与浮标基阵时钟的同步得以实现,将定位系统的水下装置进行启动,浮标基阵将等待接受来自换能器调制出的水声定位信号,固定时延后该信号就会发射,传感器会发出一种定时延迟的水声定位信号,然后等待浮标基阵的接收;
43、(3)水听器安装在水面浮标上,在接收到信号后对定位信号进行放大、采样和处理,通过与当地信号的接收时间相结合,进而得到了信号的时延,同时获得了水下机器人与阵元之间的距离数据,并根据既定的姿态与位置算法结合已知信息进行目标位置解算,这样,水下机器人在海洋中的位置也就被精确确定了。
44、(三)有益效果
45、与现有技术相比,本发明提供了一种水下机器人的浮标式短基线水下定位系统的方法,具备以下有益效果:
46、1、该水下机器人的浮标式短基线水下定位系统的方法,通过针对工程应用中水下机器人灵活、自主性等需求,设计了一套基于浮标式短基线定位系统。同步发射换能器和水面浮标基阵共同构成本系统,前者是安置在水下机器人上的。利用gps实现浮标基阵本身的坐标。在定位过程中,先将换能器安装在水下机器人上,浮标基阵接收到来自换能器发出的定位信号后进行处理,再利用时延估算的信息来对其位置进行确定。
47、2、该水下机器人的浮标式短基线水下定位系统的方法,通过针对定位算法的快速、实时性需求,提出了一种球面交汇模型的最小二乘定位算法。本算法求解的过程是,将已知量设定为每一个存在于短基线系统中的基元之间的有效声速,以换能器与水听器基阵为基础,构建非线性方程组并进行转化,然后进行计算。相比最小二乘法最突出的差异是,它先将基阵干扰和距离误差计算在内,其次采用奇异值分解法解算出水下水下机器人的坐标,进而对水下机器人进行快速定位。
- 还没有人留言评论。精彩留言会获得点赞!