一种基于沉降机制的飞行器变尺度地形跟随方法
1.本发明涉及一种基于沉降机制的飞行器变尺度地形跟随方法,属于飞行器技术领域。
背景技术:
2.在飞行器低空突防任务中,地形跟随技术能够使得飞行器与地面保持一定的安全飞行高度,能够利用地形有效提高飞行器的隐身性能,提高低空突防任务的效能。地形跟随技术是有效提高飞行器隐身性能的方法之一。然而由于地形变化复杂和飞行器机动性能有限,在保证安全飞行的前提下,必须要采用高效的地形跟随方法才能进行有效的地形跟随。
3.现有地形跟随技术通常是飞行器携带激光雷达等距离传感器,通过实时探测与地面的相对当前高度进行动态调整来实现飞行器对地形的跟随。这种地形跟随方法首先需要携带额外的传感器设备,增加了飞行器的重量,并且当地形起伏变化比较大时,由于飞行器只能探测局部地形与飞行器飞行高度的相对高度,会带来一定的滞后性和超调量,导致飞行器处于频繁高度机动中,消耗飞行器所带燃料。因此这种方法更适用于地形变化不大的情况。直接规划飞行器三维地形跟随航迹由于其问题维度高,航迹点数量多以及约束复杂,难以实现飞行器在不同尺度下对复杂地形的有效跟随。
技术实现要素:
4.针对飞行器变尺度地形跟随三维航迹规划难于实现的问题。本发明主要目的是提供一种基于沉降机制的飞行器变尺度地形跟随方法,利用高度沉降机制将飞行器变尺度地形跟随三维航迹规划解耦为二维航迹规划和纵向高度航迹规划问题,降低飞行器三维航迹规划问题的复杂性;通过兼顾飞行器纵向机动能力和地形复杂程度选择地形跟随尺度,根据选择的地形跟随尺度等间隔设置高度机动点;考虑安全飞行高度和机动性能约束,在二维平面航迹中加入高度引导点,经过高度沉降后获得包含高度信息的三维航迹,飞行器只需沿着所规划的三维航迹飞行,即能够实现飞行器在不同尺度下对复杂地形的有效跟随,提高飞行器地形复杂地形跟随能力。
5.本发明的目的是通过下述技术方案实现的:本发明公开的一种基于沉降机制的飞行器变尺度地形跟随方法,在二维平面航迹的基础上,兼顾飞行器纵向机动能力和地形复杂程度选择地形跟随尺度,根据选择的地形跟随尺度等间隔设置高度机动点,生成加入高度机动点的二维平面航迹;获取平面航迹截面所对应地形高度剖面的最大值,根据该地形高度最大值与起点终点高度,初始化所有航迹点的高度值;将平面航迹从初始高度处开始沉降,考虑安全飞行高度和机动性能约束,计算所有航迹点的可沉降高度,选择可沉降高度最小值进行飞行器航迹沉降,直到所有的航迹点均不可沉降为止,输出包含高度的飞行器变尺度地形跟随三维航迹,通过设置地形跟随尺度,在二维平面航迹中加入高度引导点,经过高度沉降后获得包含变尺度地形跟随高度引导点的三维航迹,飞行器只需沿着所规划的三维航迹飞行,即能够实现飞行器在不同
尺度下对复杂地形的有效跟随,提高飞行器地形复杂地形跟随能力。
6.本发明公开的一种基于沉降机制的飞行器地形跟随方法,包括以下步骤:步骤一:初始化二维航迹、航迹起点高度、航迹终点高度、飞行器水平飞行速度、飞行器纵向机动速度、最小安全飞行高度、地形跟随尺度和地图数据;所述二维航迹包括航迹点数量n、每个航迹点的坐标(x,y);所述航迹起点高度h0;所述航迹终点高度hf;所述飞行器水平飞行速度为v;所述飞行器爬升/下降速度为vh;所述最小安全飞行高度为h
safe
;所述地图数据为包含任务区域的栅格地图及每个栅格对应的高度值h
map
;步骤二:兼顾飞行器纵向机动能力和地形复杂程度选择地形跟随尺度d,对二维航迹进行插值处理,按地形跟随尺度d等间距插入高度引导点,根据选择的地形跟随尺度等间隔设置高度机动点,生成加入高度机动点的二位平面航迹;步骤三:依次查询步骤二所生成二维航迹剖面所对应的地形高度,生成该二维平面航迹所对应的地形高度剖面,并获得地形高度剖面的最大值h
max
;步骤四:根据航迹起点高度h0、航迹终点高度hf以及最大剖面高度h
max
,将航迹起点和航迹终点的高度分别设置为h0和hf,令h初始高度表示为h0,hf和h0+hf中的最大者,将剩余航迹点的高度设置为h,并将航迹起点和终点设置为不可沉降点;步骤五:计算每一个航迹点所对应的可沉降高度值;考虑安全飞行高度和飞行器纵向机动性能约束,分别计算每一个航迹点的可沉降高度值,该可沉降高度值为安全飞行高度约束下的可沉降高度与纵向机动性能约束下的可沉降高度两者中最小值;所述安全飞行高度约束下的可沉降高度计算方法为:定义相邻两个航迹点p1,p2的高度分别为p1,p2,两点连线间最小地形相对高度为hm,则两个航迹点p1,p2在安全飞行高度约束下的可沉降高度分别根据式(1)和式(2)计算: h
y1
=p1-hm-h
safe
ꢀꢀꢀꢀ
(1) h
y2
=p2-hm-h
safe
ꢀꢀꢀꢀ
(2)在式(1)和式(2)中:h
y1
为航迹点p1右侧在安全飞行高度约束下的可沉降高度; h
y2
为航迹点p2左侧在安全飞行高度约束下的可沉降高度;分别计算航迹点左右两侧在安全飞行高度约束下的可沉降高度,选取该航迹点左右两侧在安全飞行高度约束下的可沉降高度中的最小者作为该航迹点在安全飞行高度约束下的可沉降高度;只有在该航迹点的左右两侧航迹点存在不可沉降航迹点时,才需要进一步考虑所述纵向机动性能约束下的可沉降高度;飞行器纵向机动性能约束下的可沉降高度计算方式为:根据该航点与相邻不可沉降航点之间的水平距离、飞行器水平速度v和爬升速度vh,根据式(3)式(4)得到两个航迹点在纵向机动性能约束下的可沉降高度;
ꢀꢀꢀꢀ
(3)
ꢀꢀꢀ
(4)在式(3)和式(4)中:h
r1
和h
r2
分别为两个航迹点p1,p2在纵向机动性能约束下的可
沉降高度;d为两个航点间的水平距离;为水平速度v和爬升速度vh的比值;p2,p1分别两个航迹点的高度;分别计算航迹点左右两侧在纵向机动性能约束下的可沉降高度,取在纵向机动性能约束下该航迹点左右两侧可沉降高度值的最小值作为该航迹在纵向机动性能约束下的可沉降高度;选择该航迹点在纵向机动性能约束下的可沉降高度与安全飞行高度约束下的可沉降高度中的最小值作为该航迹点的可沉降高度值;步骤六:根据步骤五计算所有航迹点的可沉降高度值,选择所有航迹点的可沉降高度的最小值作为本次迭代中所有可沉降航迹点的高度沉降值,对所有可沉降航迹点进行高度沉降,航迹点的高度值减少所确定的高度沉降值,不可沉降航迹点的高度值保持不变;所有航迹点高度沉降完成后,将所有可沉降航迹点中可沉降高度等于此次高度沉降值的航迹点设置为不可沉降航迹点;步骤七:判断所有航迹点中是否存在可沉降航迹点;若存在可沉降点,则转步骤五,重复迭代步骤五至步骤六,直至所有航迹点均为不可沉降航迹,转入步骤八;步骤八:在二维平面航迹的基础上,经过步骤二至步骤七进行高度沉降后获得每一个航迹点的高度信息,得到包含变尺度地形跟随高度引导点的飞行器三维航迹,飞行器沿着所规划的三维航迹飞行,即能够实现飞行器在不同尺度下对复杂地形的有效跟随,提高飞行器跟随复杂地形的能力;步骤九:将步骤八规划得到在不同尺度下对复杂地形的飞行器三维航迹,尤其适用于低空巡航飞行器的隐身突防,满足低空巡航飞行器的隐身突防在不同尺度下对复杂地形的高精度、高效率地形跟随要求,提高低空巡航飞行器的隐身突防能力。
7.有益效果:1. 飞行器变尺度地形跟随三维航迹规划难于实现。本发明公开的一种基于沉降机制的飞行器变尺度地形跟随方法,利用高度沉降机制,将二维航迹从满足约束的高处逐渐沉降,并在沉降的过程中有效考虑飞行器的安全飞行高度与纵向机动能力,将平面航迹扩展成包含变尺度地形跟随高度引导点的三维航迹,从而获得满足安全飞行高度和纵向机动性能约束的三维地形跟随航迹,即利用高度沉降机制将飞行器变尺度地形跟随三维航迹规划解耦为二维航迹规划和纵向高度航迹规划问题,降低飞行器三维地形跟随航迹规划问题的复杂性,使飞行器变尺度地形跟随三维航迹规划能够实现,在满足三维航迹规划精度的前提下提高航迹规划效率。
8.2. 本发明公开的一种基于沉降机制的飞行器变尺度地形跟随方法,在二维平面航迹的基础上,兼顾飞行器纵向机动能力和地形复杂程度选择地形跟随尺度,根据选择的地形跟随尺度等间隔设置高度机动点,生成加入高度机动点的二维平面航迹;获取平面航迹截面所对应地形高度剖面的最大值,根据该地形高度最大值与起点终点高度,初始化所有航迹点的高度值;将平面航迹从初始高度处开始沉降,考虑安全飞行高度和机动性能约束,计算所有航迹点的可沉降高度,选择可沉降高度最小值进行飞行器航迹沉降,直到所有的航迹点均不可沉降为止,输出包含高度的飞行器变尺度地形跟随三维航迹,通过设置地形跟随尺度,在二维平面航迹中加入高度引导点,经过高度沉降后获得包含高度信息的三维航迹,飞行器只需沿着所规划的三维航迹飞行,即可实现飞行器在不同尺度下对复杂地形的有效跟随,提高飞行器地形复杂地形跟随能力。
9.3. 本发明公开的一种基于沉降机制的飞行器变尺度地形跟随方法,规划得到在
不同尺度下对复杂地形的飞行器三维航迹,尤其适用于低空巡航飞行器的隐身突防,满足低空巡航飞行器隐身突防在不同尺度下对复杂地形的高精度、高效率地形跟随要求,提高低空巡航飞行器的隐身突防能力。
附图说明
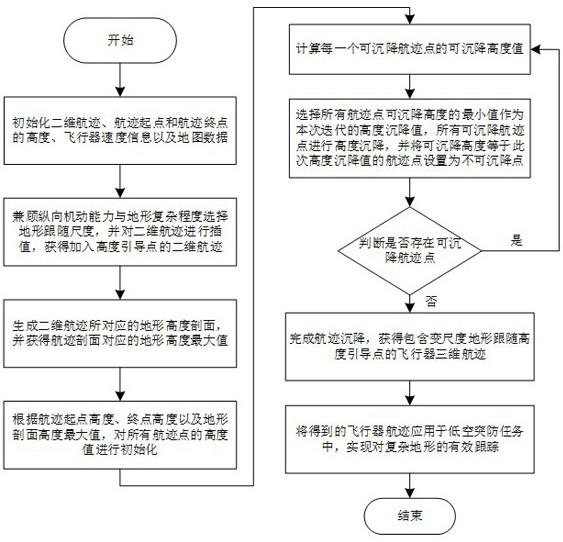
10.图1为本发明公开的一种基于沉降机制的飞行器变尺度地形跟随方法的流程图;图2为具体实施例中地形跟随尺度为5km时的地形跟随效果;图3为具体实施例中地形跟随尺度为10km时的地形跟随效果;图4为具体实施例中地形跟随尺度为20km时的地形跟随效果。
具体实施方式
11.为了更好地说明本发明的目的和优点,下面结合飞行器地形跟随仿真实例,结合附图对本发明内容作进一步说明。
12.实施例1:为了验证本发明公开的一种基于沉降机制的飞行器变尺度地形跟随方法的可行性与有益效果,下面在实施例中对本发明的技术方案进行清楚、详细地描述,本实施例仿真软件环境为visual studio2017版本,硬件环境为台式电脑,配置为windows10,intel(r) core(tm) cpu i7-7500 2.93 ghz,运行16gb。如图1所示。本实例公开的一种基于沉降机制的飞行器变尺度地形跟随方法,具体实现步骤如下:步骤一:初始化二维航迹、航迹起点高度、航迹终点高度、飞行器水平飞行速度、飞行器纵向机动速度、最小安全飞行高度、地形跟随尺度和地图数据;所述二维航迹包括航迹点数量n=4、航迹点的坐标分别为(787663,-408463),(656918,-522208),(114349,-457972),(99435,-459546);所述航迹起点高度h0=1400m;所述航迹终点高度hf=500m;所述飞行器水平飞行速度为v=200m/s;所述飞行器水平飞行速度为vh=25m/s;所述最小安全飞行高度为h
safe
=100m所述地图数据为包含任务区域的栅格地图大小及每个栅格对应的高度值,并且以地图左上角为坐标原点;步骤二:兼顾飞行器纵向机动能力和地形复杂程度选择地形跟随尺度,所述地形跟随尺度为分别为5km、10km和20km;对二维航迹进行插值处理,按地形跟随尺度等间距插入高度引导点,根据选择的地形跟随尺度等间隔设置高度机动点,生成加入高度机动点的二维平面航迹;步骤三:依次查询步骤二所生成二维航迹剖面所对应的地形高度,生成该二维平面航迹所对应的地形高度剖面,并获得地形高度剖面的最大值h
max
;步骤四:根据航迹起点高度h0、航迹终点高度hf以及最大剖面高度h
max
,将航迹起点和航迹终点的高度分别设置为h0和hf,令h初始高度表示为h0,hf和h0+hf中的最大者,将剩余航迹点的高度设置为h,并将航迹起点和终点设置为不可沉降点;
步骤五:计算每一个航迹点所对应的可沉降高度值;考虑安全飞行高度和飞行器纵向机动性能约束,分别计算每一个航迹点的可沉降高度值,该可沉降高度值为安全飞行高度约束下的可沉降高度与纵向机动性能约束下的可沉降高度两者中最小值;所述安全飞行高度约束下的可沉降高度计算方法为:定义相邻两个航迹点p1,p2的高度分别为p1,p2,两点连线间最小地形相对高度为hm,则两个航迹点p1,p2在安全飞行高度约束下的可沉降高度分别根据式(5)和式(6)计算: h
y1
=p1-hm-h
safe
ꢀꢀꢀꢀ
(5) h
y2
=p2-hm-h
safe
ꢀꢀꢀꢀ
(6)在式(5)和式(6)中:h
y1
为航迹点p1右侧在安全飞行高度约束下的可沉降高度; h
y2
为航迹点p2左侧在安全飞行高度约束下的可沉降高度;分别计算航迹点左右两侧在安全飞行高度约束下的可沉降高度,选取该航迹点左右两侧在安全飞行高度约束下的可沉降高度中的最小者作为该航迹点在安全飞行高度约束下的可沉降高度;只有在该航迹点的左右两侧航迹点存在不可沉降航迹点时,才需要进一步考虑所述纵向机动性能约束下的可沉降高度;飞行器纵向机动性能约束下的可沉降高度计算方式为:根据该航点与相邻不可沉降航点之间的水平距离、飞行器水平速度v和爬升速度vh,根据式(7)式(8)得到两个航迹点在纵向机动性能约束下的可沉降高度;
ꢀꢀꢀꢀ
(7)
ꢀꢀꢀ
(8)在式(7)和式(8)中:h
r1
和h
r2
分别为两个航迹点p1,p2在纵向机动性能约束下的可沉降高度;d为两个航点间的水平距离;为水平速度v和爬升速度vh的比值;p2,p1分别两个航迹点的高度;分别计算航迹点左右两侧在纵向机动性能约束下的可沉降高度,取在纵向机动性能约束下该航迹点左右两侧可沉降高度值的最小值作为该航迹在纵向机动性能约束下的可沉降高度;选择该航迹点在纵向机动性能约束下的可沉降高度与安全飞行高度约束下的可沉降高度中的最小值作为该航迹点的可沉降高度值;步骤六:根据步骤五计算所有航迹点的可沉降高度值,选择所有航迹点的可沉降高度的最小值作为本次迭代中所有可沉降航迹点的高度沉降值,对所有可沉降航迹点进行高度沉降,航迹点的高度值减少所确定的高度沉降值,不可沉降航迹点的高度值保持不变;所有航迹点高度沉降完成后,将所有可沉降航迹点中可沉降高度等于此次高度沉降值的航迹点设置为不可沉降航迹点;步骤七:判断所有航迹点中是否存在可沉降航迹点;若存在可沉降点,则转步骤五,重复迭代步骤五至步骤六,直至所有航迹点均为不可沉降航迹,转入步骤八;步骤八:在二维平面航迹的基础上,经过步骤二至步骤七进行高度沉降后获得每一个航迹点的高度信息,得到包含变尺度地形跟随高度引导点的飞行器三维航迹,飞行器沿着所规划的三维航迹飞行,即能够实现飞行器在不同尺度下对复杂地形的有效跟随,提高飞行器跟随复杂地形的能力;步骤九:将步骤八规划得到在不同尺度下对复杂地形的飞行器三维航迹,尤其适用于低空巡航飞行器的隐身突防,满足低空巡航飞行器的隐身突防在不同尺度下对复杂地
形的高精度、高效率地形跟随要求,提高低空巡航飞行器的隐身突防能力。
13.基于本实施例公开的一种基于沉降机制的飞行器变尺度地形跟随方法,在跟随尺度分别为5km、10km和20km下的地形跟随效果分别如图2、图3和图4所示。结果表明,利用本发明生成的三维地形跟随航迹始终保持满足安全飞行高度约束的飞行高度,且能够随着地形的变化动态调整自身高度。本发明能够考虑地形变化和飞行器纵向机动性能约束,在不同尺度下对复杂地形进行有效跟随,验证了本发明方法的有效性。进一步分析表明,地形跟随尺度越小,地形跟随效果越好,但飞行器的纵向机动越频繁,导致飞行消耗大量的燃料,而地形跟随尺度越大,飞行器机动次数变小,由于航迹点之间的地形高度变化,导致飞行器对地形的跟随效果较差。
14.以上的具体描述,是对发明的目的、技术方案和有益效果的进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施实例,仅用于解释本发明,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1