一种水质检测用取样器的制作方法
1.本发明属于取样器技术领域,具体是指一种水质检测用取样器。
背景技术:
2.在进行水质检测前,需要先对水体进行取样操作,而传统的取样方式,由于缺乏便捷的采样工具,导致取样过程较为危险和繁琐,且难以取到有代表性的水样。
3.特别是水体较大时,往往需要对水体的多处位置分别进行取样,导致传统的取样方式难以胜任取样工作,为此,现有技术常采用搭载有摄像头和取样器的无人机对水体进行取样,以解决不便于对大水体进行多点取样的技术问题,采用此种方式时,若无人机与使用者距离较远,则需要使用者反复调节摄像头,以观察当前取水处的水面是否存在阻碍取样的障碍物和漂浮物,从而判断当前取水处是否适合取样,采用此种方式时,需要人为调节摄像头,且需要通过人眼对摄像头采集的画面进行判断,导致此种取样方式较为费时费力,当风吹过时,无人机会不可避免地发生抖动,从而使摄像头采集的画面发生抖动,进而不利于通过人眼进行判断。
4.同时,当距离较远时,不便于使用者及时对无人机进行操控,当水面突然刮起较强的风时,使用者往往来不及操控,从而使无人机坠落水中的概率大大增加,进而带来经济损失。
技术实现要素:
5.针对上述情况,为克服现有技术的缺陷,本发明提供了一种水质检测用取样器,针对现有的取样方式不便于观察当前取水处的水面是否存在阻碍采样的障碍物和漂浮物的技术问题,本方案预先在将水面障碍物和漂浮物的图片存储在存储器内,在取样前,通过图像采集模块采集水面的图片,并自动与存储器内的图片进行比对,以判断当前水面是否适合取样,并将判断结果发送给使用者,而不需要人为调节摄像头和通过人眼对摄像头采集的画面进行判断,不仅提高了效率,且智能化程度高。
6.本发明采取的技术方案如下:本发明提供的一种水质检测用取样器,包括控制舱、取样舱、飞行驱动组件、降落缓冲组件、取样机构和实时观察机构,所述取样舱设于控制舱的底部,所述飞行驱动组件呈阵列分布对称设于控制舱上,所述降落缓冲组件呈阵列分布对称设于控制舱上,所述取样机构设于取样舱上,所述实时观察机构设于取样舱的底部,所述取样机构包括存储组件、取水组件和取样调节组件,所述存储组件设于控制舱内且设于取样舱内,所述取水组件设于取样舱上,所述取样调节组件设于取样舱的底部。
7.作为本方案的进一步改进,所述取样调节组件包括取样调节套筒、取样调节丝杆、取样调节套柱、取样调节电机和取样控制电推杆,所述取样调节套筒的顶部铰接设于取样舱的底部,所述取样调节套筒呈下端开口的腔体设置,所述取样调节丝杆转动设于取样调节套筒内,所述取样调节套柱滑动插拔连接设于取样调节套筒内,所述取样调节套柱螺纹连接设于取样调节丝杆上,所述取样调节电机设于取样调节套筒内,所述取样调节套筒的
侧壁设有取样控制滑槽,所述取样控制电推杆的顶端铰接设于取样舱的底部,所述取样控制电推杆的另一端设有取样控制滑动端,所述取样控制滑动端与取样控制滑槽呈滑动连接设置。
8.作为本方案的进一步改进,所述存储组件包括顶部旋转圆盘、底部旋转圆盘、集水瓶、顶部控制电推杆和存储控制电机,所述顶部旋转圆盘转动设于取样舱的内顶壁上,所述底部旋转圆盘转动设于取样舱的内底壁上,多组所述集水瓶呈阵列分布设于底部旋转圆盘上,多组所述顶部控制电推杆设于顶部旋转圆盘的底部且设于集水瓶的正上方,所述顶部控制电推杆的底部设有闭合瓶塞,所述存储控制电机设于控制舱内,所述存储控制电机的输出端与顶部旋转圆盘和底部旋转圆盘同轴固接。
9.作为本方案的进一步改进,所述取水组件包括取水泵、进水管、弹性伸缩连通软管和出水管,所述取水泵设于取样舱上,所述进水管设于取样调节套柱的底部,所述弹性伸缩连通软管的一端连通设于取水泵上,所述弹性伸缩连通软管的另一端与进水管呈连通设置,所述出水管的一端连通设于取水泵上,所述出水管的另一端设有出水口,所述出水口设于底部旋转圆盘和集水瓶之间。
10.作为本方案的进一步改进,所述飞行驱动组件包括飞行固定架、飞行驱动电机和飞行桨叶,所述飞行固定架设于控制舱的侧壁上,所述飞行驱动电机设于飞行固定架上,所述飞行桨叶转动设于飞行固定架上,所述飞行桨叶与飞行驱动电机的输出端同轴固接。
11.作为本方案的进一步改进,所述降落缓冲组件包括缓冲固定板、降落缓冲套筒、降落缓冲套杆、降落缓冲垫、一级缓冲弹簧和二级缓冲弹簧,所述缓冲固定板设于控制舱的侧壁上,所述降落缓冲套筒设于降落缓冲套筒的底部,所述降落缓冲套筒呈下端开口的腔体设置,所述降落缓冲套杆滑动插拔连接设于降落缓冲套筒的底部,所述降落缓冲垫设于降落缓冲套杆的底部,所述一级缓冲弹簧的一端设于降落缓冲套筒的内顶壁,所述一级缓冲弹簧的另一端设于降落缓冲套杆上,所述二级缓冲弹簧的一端设于降落缓冲套筒上,所述二级缓冲弹簧的另一端设于降落缓冲套杆上,所述二级缓冲弹簧设于一级缓冲弹簧的下方。
12.进一步地,所述实时观察机构包括纵向观察控制组件、横向观察控制组件和实时观察组件,所述纵向观察控制组件设于取样舱的底部,所述纵向观察控制组件包括纵向观察固定杆、纵向观察驱动电机、纵向观察驱动锥齿轮和纵向观察从动锥齿轮,所述纵向观察固定杆设于取样舱的底部,所述纵向观察固定杆的底部设有纵向观察控制端,所述纵向观察驱动电机设于纵向观察固定杆上,所述纵向观察驱动锥齿轮与纵向观察驱动电机的输出端同轴固接,所述纵向观察从动锥齿轮转动设于纵向观察控制端上,所述纵向观察从动锥齿轮与纵向观察驱动锥齿轮呈啮合设置。
13.进一步地,所述横向观察控制组件转动设于纵向观察控制端上,所述横向观察控制组件包括横向观察固定杆、横向观察驱动电机、横向观察驱动锥齿轮和横向观察从动锥齿轮,所述横向观察固定杆的一端转动设于纵向观察控制端上且与纵向观察从动锥齿轮同轴固接,所述横向观察固定杆上远离纵向观察固定杆的另一端设有横向观察控制端,所述横向观察驱动电机设于横向观察固定杆上,所述横向观察驱动锥齿轮与横向观察驱动电机的输出端同轴固接,所述横向观察从动锥齿轮转动设于横向观察控制端上,所述横向观察从动锥齿轮与横向观察驱动锥齿轮呈啮合设置。
14.进一步地,所述实时观察组件转动设于横向观察控制端上,所述实时观察组件包括实时观察固定座和实时观察模块,所述实时观察固定座转动设于横向观察控制端上,所述实时观察固定座与横向观察从动锥齿轮同轴固接,所述实时观察模块设于实时观察固定座上远离横向观察控制端的一端,所述实时观察模块为摄像头。
15.优选的,所述控制舱上设有信号收发天线,所述取样舱上设有舱门,所述飞行固定架的底部设有距离控制模块,所述距离控制模块为超声波收发器,所述距离控制模块的底部设有发射端和接收端,所述发射端用于向水面发射超声波,所述接收端用于接收水面反射超声波。
16.优选的,所述图像采集模块设于取样舱的底部,所述图像采集模块为照相机,所述控制舱内设有控制器,所述控制器内设有存储器,所述控制器无线连接有遥控器,所述遥控器上设有遥控天线和显示屏,所述遥控器将控制信号发送至遥控天线,所述遥控天线接收来自遥控器的控制信号,并将控制信号发送至信号收发天线,所述控制舱接收来自遥控天线的控制信号,并将控制信号发送至控制器,所述存储器内设有预先存储的水面障碍物和漂浮物的图片,所述图像采集模块用于采集水面的图片,并将水面的图片发送至控制器,所述控制器接收来自图像采集模块采集到的水面的图片,并与存储器内的水面障碍物和漂浮物的图片进行对比,以生成对比结果,并将对比结果发送至遥控器,遥控器接收来自控制器的对比结果,并将对比结果显示在显示屏上。
17.其中,所述控制舱内设有蓄电池,所述蓄电池分别与控制器、存储器、图像采集模块、距离控制模块、实时观察模块、横向观察驱动电机、纵向观察驱动电机、取样调节电机、取水泵、顶部控制电推杆、存储控制电机、飞行驱动电机和信号收发天线。
18.采用上述方案本发明取得的有益效果如下:(1)针对现有的取样方式不便于观察当前取水处的水面是否存在阻碍采样的障碍物和漂浮物的技术问题,本方案预先在将水面障碍物和漂浮物的图片存储在存储器内,在取样前,通过图像采集模块采集水面的图片,并自动与存储器内的图片进行比对,以判断当前水面是否适合取样,并将判断结果发送给使用者,而不需要人为调节摄像头和通过人眼对摄像头采集的画面进行判断,不仅提高了效率,且智能化程度高。
19.(2)针对因距离较远导致的无人机容易坠落水中的技术问题,本方案预先设置有控制距离l1,并通过距离控制模块实时对取样器与水面之间的距离l2进行控制,而不需要使用者实时对l2进行控制,使l2的值始终等于l1的值,当水面突然刮起较强的风,导致取样器与水面之间的距离缩短时,不需要使用者进行操控,取样器本身会及时察觉到取样器与水面之间的距离变化,并自动使取样器升高,使取样器与水面之间的距离l2的值始终保持在与l1的值相等的程度位置,解决了因距离过远导致的取样器容易坠入水体中的技术问题。
20.(3)在降落时,针对因取样器与地面之间的冲击力较大而容易受损的技术问题,本方案通过设置降落缓冲组件,以减轻冲击力对取样器带来的损害。
21.(4)在取样过程中,本方案通过取样机构对水体进行取样操作,以实现对大水体进行多点取样的技术效果。
22.(5)针对因距离过远而不便于观察的技术问题,本方案通过设置实时观察机构,以便于使用者从多方向对取样器的周围状况进行观察。
附图说明
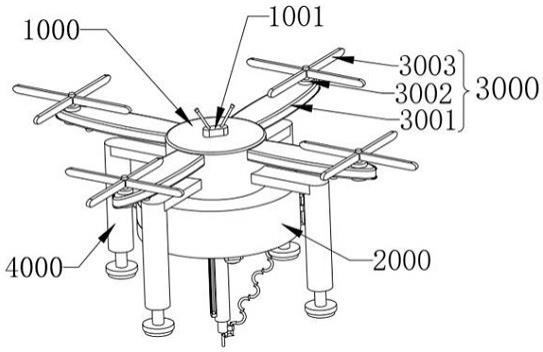
23.图1为本发明提供的一种水质检测用取样器的整体结构示意图;图2为遥控器的整体结构示意图;图3为本发明提供的一种水质检测用取样器的仰视图;图4为本发明提供的一种水质检测用取样器的俯视图;图5为本发明提供的一种水质检测用取样器的前视图;图6为本发明提供的一种水质检测用取样器的右视图;图7为图4中a-a部分的平面剖视图;图8为图4中b-b部分的平面剖视图;图9为图4中c-c部分的平面剖视图;图10为图4中d-d部分的平面剖视图;图11为图6中a部分的局部放大示意图;图12为图7中b部分的局部放大示意图;图13为图8中c部分的局部放大示意图;图14为图9中d部分的局部放大示意图;图15为图10中e部分的局部放大示意图。
24.其中,1000、控制舱,1001、信号收发天线,2000、取样舱,2001、舱门,3000、飞行驱动组件,3001、飞行固定架,3002、飞行驱动电机,3003、飞行桨叶,4000、降落缓冲组件,4001、缓冲固定板,4002、降落缓冲套筒,4003、降落缓冲套杆,4004、降落缓冲垫,4005、一级缓冲弹簧,4006、二级缓冲弹簧,5000、取样机构,5100、存储组件,5101、顶部旋转圆盘,5102、底部旋转圆盘,5103、集水瓶,5104、顶部控制电推杆,5105、闭合瓶塞,5106、存储控制电机,5200、取水组件,5201、取水泵,5202、进水管,5203、弹性伸缩连通软管,5204、出水管,5205、出水口,5300、取样调节组件,5301、取样调节套筒,5302、取样调节丝杆,5303、取样调节套柱,5304、取样调节电机,5305、取样控制滑槽,5306、取样控制电推杆,5307、取样控制滑动端,6000、实时观察机构,6100、纵向观察控制组件,6101、纵向观察固定杆,6102、纵向观察控制端,6103、纵向观察驱动电机,6104、纵向观察驱动锥齿轮,6105、纵向观察从动锥齿轮,6200、横向观察控制组件,6201、横向观察固定杆,6202、横向观察控制端,6203、横向观察驱动电机,6204、横向观察驱动锥齿轮,6205、横向观察从动锥齿轮,6300、实时观察组件,6301、实时观察固定座,6302、实时观察模块,7000、距离控制模块,7001、发射端,7002、接收端,7003、图像采集模块,7004、控制器,7005、蓄电池,8000、遥控器,8001、遥控天线,8002、显示屏。
25.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
具体实施方式
26.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例;基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
27.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
28.参阅图1、图4、图6、图7、图8、图10、图13、图14和图15,本发明提供的一种水质检测用取样器,包括控制舱1000、取样舱2000、飞行驱动组件3000、降落缓冲组件4000、取样机构5000和实时观察机构6000,所述取样舱2000设于控制舱1000的底部,所述飞行驱动组件3000呈阵列分布对称设于控制舱1000上,所述降落缓冲组件4000呈阵列分布对称设于控制舱1000上,所述取样机构5000设于取样舱2000上,所述实时观察机构6000设于取样舱2000的底部,所述取样机构5000包括存储组件5100、取水组件5200和取样调节组件5300,所述存储组件5100设于控制舱1000内且设于取样舱2000内,所述取水组件5200设于取样舱2000上,所述取样调节组件5300设于取样舱2000的底部,所述取样调节组件5300包括取样调节套筒5301、取样调节丝杆5302、取样调节套柱5303、取样调节电机5304和取样控制电推杆5306,所述取样调节套筒5301的顶部铰接设于取样舱2000的底部,所述取样调节套筒5301呈下端开口的腔体设置,所述取样调节丝杆5302转动设于取样调节套筒5301内,所述取样调节套柱5303滑动插拔连接设于取样调节套筒5301内,所述取样调节套柱5303螺纹连接设于取样调节丝杆5302上,所述取样调节电机5304设于取样调节套筒5301内,所述取样调节套筒5301的侧壁设有取样控制滑槽5305,所述取样控制电推杆5306的顶端铰接设于取样舱2000的底部,所述取样控制电推杆5306的另一端设有取样控制滑动端5307,所述取样控制滑动端5307与取样控制滑槽5305呈滑动连接设置,所述存储组件5100包括顶部旋转圆盘5101、底部旋转圆盘5102、集水瓶5103、顶部控制电推杆5104和存储控制电机5106,所述顶部旋转圆盘5101转动设于取样舱2000的内顶壁上,所述底部旋转圆盘5102转动设于取样舱2000的内底壁上,多组所述集水瓶5103呈阵列分布设于底部旋转圆盘5102上,多组所述顶部控制电推杆5104设于顶部旋转圆盘5101的底部且设于集水瓶5103的正上方,所述顶部控制电推杆5104的底部设有闭合瓶塞5105,所述存储控制电机5106设于控制舱1000内,所述存储控制电机5106的输出端与顶部旋转圆盘5101和底部旋转圆盘5102同轴固接,所述取水组件5200包括取水泵5201、进水管5202、弹性伸缩连通软管5203和出水管5204,所述取水泵5201设于取样舱2000上,所述进水管5202设于取样调节套柱5303的底部,所述弹性伸缩连通软管5203的一端连通设于取水泵5201上,所述弹性伸缩连通软管5203的另一端与进水管5202呈连通设置,所述出水管5204的一端连通设于取水泵5201上,所述出水管5204的另一端设有出水口5205,所述出水口5205设于底部旋转圆盘5102和集水瓶5103之间。
29.参阅图1和图9,所述飞行驱动组件3000包括飞行固定架3001、飞行驱动电机3002和飞行桨叶3003,所述飞行固定架3001设于控制舱1000的侧壁上,所述飞行驱动电机3002设于飞行固定架3001上,所述飞行桨叶3003转动设于飞行固定架3001上,所述飞行桨叶3003与飞行驱动电机3002的输出端同轴固接,所述降落缓冲组件4000包括缓冲固定板4001、降落缓冲套筒4002、降落缓冲套杆4003、降落缓冲垫4004、一级缓冲弹簧4005和二级缓冲弹簧4006,所述缓冲固定板4001设于控制舱1000的侧壁上,所述降落缓冲套筒4002设于降落缓冲套筒4002的底部,所述降落缓冲套筒4002呈下端开口的腔体设置,所述降落缓冲套杆4003滑动插拔连接设于降落缓冲套筒4002的底部,所述降落缓冲垫4004设于降落缓
冲套杆4003的底部,所述一级缓冲弹簧4005的一端设于降落缓冲套筒4002的内顶壁,所述一级缓冲弹簧4005的另一端设于降落缓冲套杆4003上,所述二级缓冲弹簧4006的一端设于降落缓冲套筒4002上,所述二级缓冲弹簧4006的另一端设于降落缓冲套杆4003上,所述二级缓冲弹簧4006设于一级缓冲弹簧4005的下方。
30.参阅图1、图6、图11和图12,所述实时观察机构6000包括纵向观察控制组件6100、横向观察控制组件6200和实时观察组件6300,所述纵向观察控制组件6100设于取样舱2000的底部,所述纵向观察控制组件6100包括纵向观察固定杆6101、纵向观察驱动电机6103、纵向观察驱动锥齿轮6104和纵向观察从动锥齿轮6105,所述纵向观察固定杆6101设于取样舱2000的底部,所述纵向观察固定杆6101的底部设有纵向观察控制端6102,所述纵向观察驱动电机6103设于纵向观察固定杆6101上,所述纵向观察驱动锥齿轮6104与纵向观察驱动电机6103的输出端同轴固接,所述纵向观察从动锥齿轮6105转动设于纵向观察控制端6102上,所述纵向观察从动锥齿轮6105与纵向观察驱动锥齿轮6104呈啮合设置,所述横向观察控制组件6200转动设于纵向观察控制端6102上,所述横向观察控制组件6200包括横向观察固定杆6201、横向观察驱动电机6203、横向观察驱动锥齿轮6204和横向观察从动锥齿轮6205,所述横向观察固定杆6201的一端转动设于纵向观察控制端6102上且与纵向观察从动锥齿轮6105同轴固接,所述横向观察固定杆6201上远离纵向观察固定杆6101的另一端设有横向观察控制端6202,所述横向观察驱动电机6203设于横向观察固定杆6201上,所述横向观察驱动锥齿轮6204与横向观察驱动电机6203的输出端同轴固接,所述横向观察从动锥齿轮6205转动设于横向观察控制端6202上,所述横向观察从动锥齿轮6205与横向观察驱动锥齿轮6204呈啮合设置,所述实时观察组件6300转动设于横向观察控制端6202上,所述实时观察组件6300包括实时观察固定座6301和实时观察模块6302,所述实时观察固定座6301转动设于横向观察控制端6202上,所述实时观察固定座6301与横向观察从动锥齿轮6205同轴固接,所述实时观察模块6302设于实时观察固定座6301上远离横向观察控制端6202的一端,所述实时观察模块6302为摄像头。
31.参阅图1、图3和图5,所述控制舱1000上设有信号收发天线1001,所述取样舱2000上设有舱门2001,所述飞行固定架3001的底部设有距离控制模块7000,所述距离控制模块7000为超声波收发器,所述距离控制模块7000的底部设有发射端7001和接收端7002,所述发射端7001用于向水面发射超声波,所述接收端7002用于接收水面反射超声波。
32.参阅图1、图2、图3、图7、图11、图14、图13、图14和图15,所述图像采集模块7003设于取样舱2000的底部,所述图像采集模块7003为照相机,所述控制舱1000内设有控制器7004,所述控制器7004内设有存储器,所述控制器7004无线连接有遥控器8000,所述遥控器8000上设有遥控天线8001和显示屏8002,所述遥控器8000将控制信号发送至遥控天线8001,所述遥控天线8001接收来自遥控器8000的控制信号,并将控制信号发送至信号收发天线1001,所述控制舱1000接收来自遥控天线8001的控制信号,并将控制信号发送至控制器7004,所述存储器内设有预先存储的水面障碍物和漂浮物的图片,所述图像采集模块7003用于采集水面的图片,并将水面的图片发送至控制器7004,所述控制器7004接收来自图像采集模块7003采集到的水面的图片,并与存储器内的水面障碍物和漂浮物的图片进行对比,以生成对比结果,并将对比结果发送至遥控器8000,遥控器8000接收来自控制器7004的对比结果,并将对比结果显示在显示屏8002上,所述控制舱1000内设有蓄电池7005,所述
蓄电池7005分别与控制器7004、存储器、图像采集模块7003、距离控制模块7000、实时观察模块6302、横向观察驱动电机6203、纵向观察驱动电机6103、取样调节电机5304、取水泵5201、顶部控制电推杆5104、存储控制电机5106、飞行驱动电机3002和信号收发天线1001。
33.实施例一,参阅图1、图2和图7,使用者通过遥控器8000控制取样器对水体进行取样操作。
34.使用者通过遥控器8000发出控制信号,控制器7004接收来自遥控器8000的控制信号,并启动四组飞行驱动电机3002,四组飞行驱动电机3002带动四组飞行桨叶3003转动,从而带动控制舱1000和取样舱2000起飞,从而便于对水体进行取样操作。
35.实施例二,参阅图1和图9,该实施例基于上述实施例,在降落至地面时,取样器与地面之间会产生较强的冲击力,从而对取样器造成损坏,为此,本方案通过设置降落缓冲组件4000,以减轻冲击力带来的损害。
36.当冲击力产生时,本方案通过降落缓冲套筒4002、降落缓冲套杆4003、降落缓冲垫4004、一级缓冲弹簧4005和二级缓冲弹簧4006的配合使用,以减轻取样器降落时收到的冲击力,从而降低取样器受到的损害。
37.实施例三,该实施例基于上述实施例,参阅图1、图4、图6、图7、图8、图10、图13、图14和图15,通过设置取样机构5000对水体进行取样操作。
38.在取样时,使用者分别启动取样调节电机5304和取样控制电推杆5306,处于启动状态的取样控制电推杆5306做伸长运动,从而带动处于折叠状态的取样调节套筒5301向下方摆动,直至摆动到如图6的状态,处于启动状态的取样调节电机5304带动取样调节丝杆5302转动,取样调节丝杆5302带动取样调节套柱5303沿着取样调节套筒5301和取样调节丝杆5302向下移动,直至取样调节套柱5303完全从取样调节套筒5301中伸出,且进水管5202没入到水面的下方,之后,使用者启动取水泵5201,处于启动状态的取水泵5201在进水管5202处产生吸力,将水样吸入到进水管5202内,并依次经过弹性伸缩连通软管5203、取水泵5201和出水管5204,并最终沿着出水口5205进入到集水瓶5103内。
39.在取水完毕后,使用者关闭取水泵5201,并启动存储控制电机5106,处于启动状态的存储控制电机5106带动顶部旋转圆盘5101和底部旋转圆盘5102转动,从而带动顶部控制电推杆5104和集水瓶5103转动,将注满水样的集水瓶5103转动至远离出水口5205的位置,将空的集水瓶5103转动至出水口5205的下方,并启动注满水样的集水瓶5103上方的顶部控制电推杆5104,处于启动状态的顶部控制电推杆5104带动闭合瓶塞5105向下移动,从而使闭合瓶塞5105塞紧集水瓶5103,之后,使用者控制取样器飞行至下一采样点进行水体采样操作。
40.实施例四,该实施例基于上述实施例,参阅图1、图6、图11和图12,本方案通过设置实时观察机构6000,以便于使用者从多方向对取样器的周围状况进行观察。
41.在取样过程中,使用者通过启动纵向观察驱动电机6103、横向观察驱动电机6203和实时观察模块6302,处于启动状态的纵向观察驱动电机6103带动纵向观察驱动锥齿轮6104转动,纵向观察驱动锥齿轮6104通过齿轮传动带动纵向观察从动锥齿轮6105转动,纵向观察从动锥齿轮6105带动横向观察固定杆6201摆动,从而便于在纵向上对实时观察模块6302进行调节,处于启动状态额横向观察驱动电机6203带动横向观察驱动锥齿轮6204转动,横向观察驱动锥齿轮6204通过齿轮传动带动横向观察从动锥齿轮6205转动,横向观察
从动锥齿轮6205带动实时观察固定座6301摆动,从而便于在横向上对实时观察模块6302进行调节,通过纵向观察控制组件6100和横向观察控制组件6200配合使用,实现了从多方向对取样器的周围状况进行观察的技术效果,有助于使用者实时对取样器的周围状况进行观察。
42.实施例五,该实施例基于上述实施例,参阅图1、图2、图3和图7,本方案通过设置距离控制模块7000,以实现避免取样器坠入水体中的技术效果。
43.通过遥控器8000预先设置控制距离l1,在取样过程中,通过发射端7001发射超声波,并通过接收端7002接收水面反弹的超声波,设置超声波从发射到返回的时间为t1,由于超声波在空气中的传播速度s1为340m/s,则遥控器8000与地面之间的距离l2为:l2=s1*t1/2,当l2=l1时,控制器7004不需要对飞行驱动电机3002进行调节,取样器保持原有高度;当l2》l1时,控制器7004需要对飞行驱动电机3002进行调节,使取样器的与水面之间的距离减小,直至减小到l2=l1的程度为止;当l2《l1时,控制器7004需要对飞行驱动电机3002进行调节,使取样器的与水面之间的距离增加,直至增加到l2=l1的程度为止。
44.通过执行上述操作,使取样器与水面之间的距离保持在预设控制距离l1上,解决了因操作失误而导致的取样器坠入水中的技术问题,以及因强风忽然来袭而使用者来不及控制导致的取样器坠入水中的技术问题。
45.实施例六,该实施例基于上述实施例,参阅图2和图7,通过设置图像采集模块7003,取样器能够自动对水面的采样点的情况进行分析,解决了因水面周围存在阻碍采样的障碍物和漂浮物而导致的对采样过程带来不利影响的技术问题,提高了采样效率。
46.在取样前,使用者预先将水面障碍物和漂浮物的图片存储在存储器内,在取样时,通过图像采集模块7003采集水面的图片,并将水面的图片发送至控制器7004,控制器7004接收来自图像采集模块7003的水面的图片,并与存储器内的水面障碍物的图片进行对比,若采集到水面的图片与存储器内的水面障碍物的图片相互对应,则生成“不适合采样”的对比结果,并将“不适合采样”的对比结果发送至遥控器8000,遥控器8000接收来自控制器7004的对比结果,并将对比结果显示在显示屏8002上,从而告诉使用者,此处水面有阻碍采样的障碍物和漂浮物,不适合进行采样,需要更换采样地点;若采集到水面的图片与存储器内的水面障碍物的图片不对应,则生成“适合采样”的对比结果,并将“适合采样”的对比结果发送至遥控器8000,遥控器8000接收来自控制器7004的对比结果,并将对比结果显示在显示屏8002上,从而告诉使用者,此处水面没有阻碍采样的障碍物和漂浮物,适合进行采样,且不需要更换采样地点。
47.通过执行上述操作,取样器能够自动对水面的采样点的情况进行分析,解决了现有的取样方式不便于观察当前取水处的水面是否存在阻碍采样的障碍物和漂浮物的技术问题,提高了采样效率。
48.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
49.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
50.以上对本发明及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1