一种定位方法、装置、系统和部件与流程
本发明涉及信号处理,特别涉及一种定位方法、装置、系统和部件。
背景技术:
1、现有技术中,当车辆在行驶过程中,能量低于阈值需要进行补能时,一般是车辆进行能量较低的预警,然后由人工根据车载导航设备确定进行补能的场端,并行驶到补能的场端后进行能量补充。
2、当车辆行驶进场端后,场端要对车端进行路径规划,以控制车端进行行驶,此时涉及到对车端的定位问题,因此,如何实现对进场的车辆的定位,并且要保证定位精度高,成为急需解决的问题。
技术实现思路
1、本发明的目的,就是针对现有技术的缺陷,提供定位方法、装置、系统和部件,以解决现有技术中的对车端的对车端的定位不准确的问题。
2、为实现上述目的,本发明实施例第一方面提供了一种定位方法,所述方法包括:
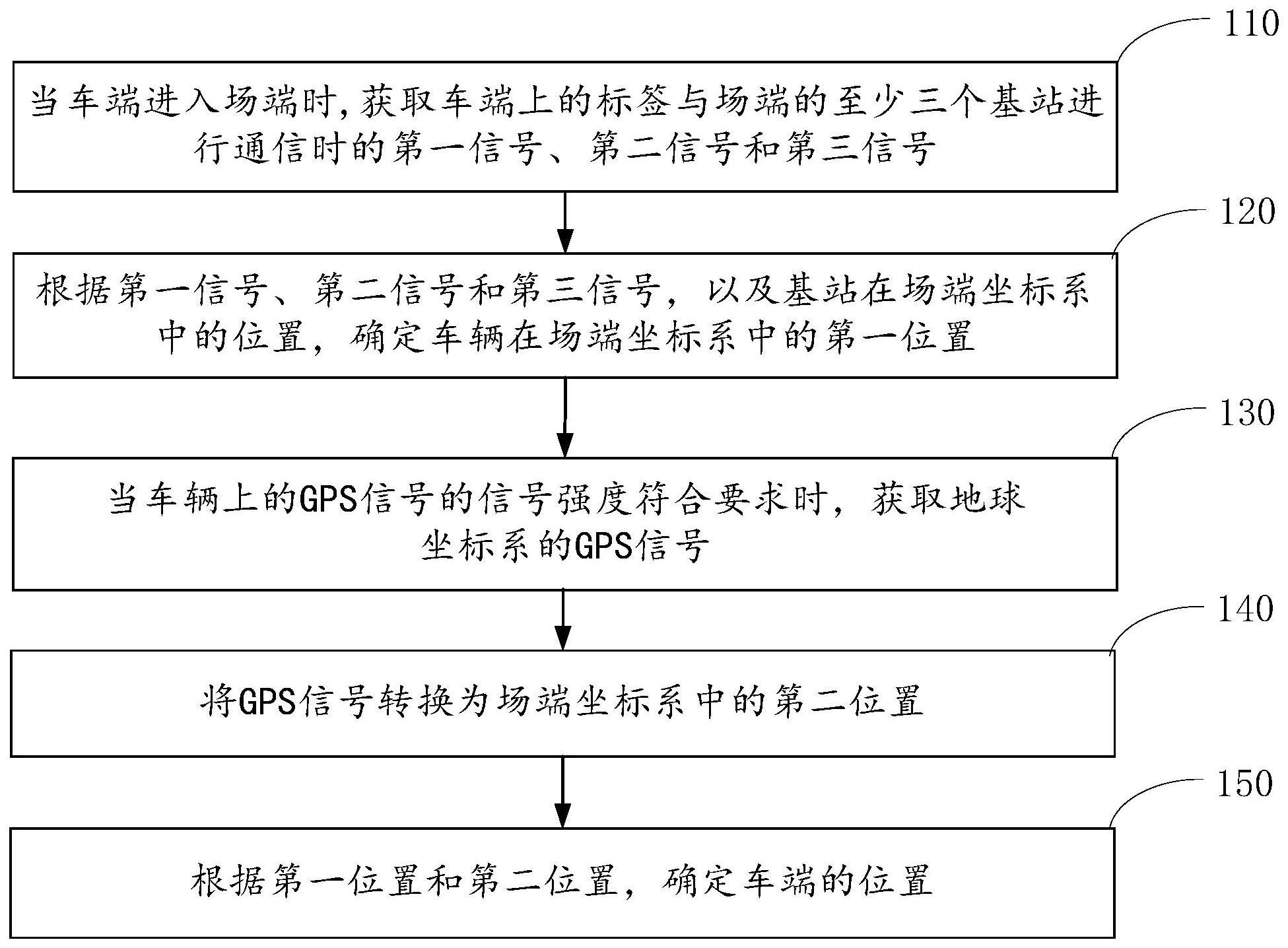
3、当车端进入场端时,获取车端上的标签与场端的至少三个基站进行通信时的第一信号、第二信号和第三信号;
4、根据所述第一信号、第二信号和第三信号,以及所述基站在场端坐标系中的位置,确定车辆在场端坐标系中的第一位置;和/或,
5、当车辆上的gps信号的信号强度符合要求时,获取地球坐标系的所述gps信号;
6、将所述gps信号转换为场端坐标系中的第二位置;
7、根据所述第一位置和所述第二位置,确定车端的位置。
8、在一种可能的实现方式中,所述方法之前还包括:
9、在场端中设置基站,并获取每个基站在所述场端坐标系的位置。
10、在一种可能的实现方式中,所述当车辆上的gps信号的信号强度符合要求之前,所述方法还包括:
11、判断所述车辆上的gps信号的信号强度是否符合要求;
12、当gps信号的标志位为预设的标志位时,所述信号强度符合要求;
13、当gps信号的标志位非预设的标志位时,所述信号强度不符合要求。
14、在一种可能的实现方式中,所述方法还包括:
15、当车辆上的gps信号的信号强度不符合要求时,所述确定所述第一位置为车端的位置。
16、在一种可能的实现方式中,所述根据所述第一信号、第二信号和第三信号,以及所述基站在场端坐标系中的位置,确定车辆在场端坐标系中的第一位置具体包括:
17、根据所述第一信号,确定所述基站中的第一基站与所述标签的第一距离;
18、根据所述第二信号,确定所述基站中的第二基站与所述标签的第二距离;
19、根据所述第三信号,确定所述基站中的第三基站与所述标签的第三距离;
20、根据所述第一距离、所述第二距离和所述第三距离,以及所述第一基站的位置、第二基站的位置和第三基站的位置,通过三角定位方法确定所述标签在所述场端坐标系的第一位置。
21、在一种可能的实现方式中,所述方法还包括:
22、当所述车端进入所述场端时,所述场端的基站与所述车端的标签建立uwb通信。
23、在一种可能的实现方式中,场端设置多种类型的传感器,当所述传感器为图像传感器时,所述方法还包括:
24、接收所述图像传感器发送的所述车端的图像信息;
25、根据所述图像信息、预设的图像坐标系和场端坐标系的映射关系,确定所述车端的第三位置;
26、根据所述第一位置,和/或,所述第二位置,和/或,所述第三位置,确定车端的位置。
27、在一种可能的实现方式中,场端设置多种类型的传感器,当所述传感器为激光雷达时,所述方法还包括:
28、接收所述激光雷达发送的激光点云信息;
29、根据所述激光点云信息,确定车端在激光点云坐标系的位置;
30、根据所述车端在激光点云坐标系的位置,以及预设的所述激光点云坐标系和场端坐标系的映射关系,确定所述车端的第四位置;
31、根据所述第一位置,和/或,所述第二位置,和/或,所述第三位置,和/或,所述第三四位置,确定车端的位置。
32、在一种可能的实现方式中,场端设置多种类型的传感器,当所述传感器为毫米波雷达时,所述方法还包括:
33、接收所述毫米波雷达发送的测距信息;
34、根据所述测距信息,确定车端在毫米波雷达坐标系的位置;
35、根据所述车端在毫米波雷达坐标系的位置,以及预设的所述毫米波雷达坐标系和场端坐标系的映射关系,确定所述车端的第五位置;
36、根据所述第一位置,和/或,所述第二位置,和/或,所述第三位置,和/或,所述第四位置,和/或,所述第五位置,确定车端的位置。
37、本发明实施例第二方面提供了一种用于实现本发明实施例第一方面的定位方法的定位装置,所述定位装置包括:
38、第一获取模块,所述第一获取模块用于当车端进入场端时,获取车端上的标签与场端的至少三个基站进行通信时的第一信号、第二信号和第三信号;
39、第一确定模块,所述第一确定模块用于根据所述第一信号、第二信号和第三信号,以及所述基站在场端坐标系中的位置,确定车辆在场端坐标系中的第一位置;和/或,
40、第二获取模块,所述第二获取模块用于当车辆上的gps信号的信号强度符合要求时,获取地球坐标系的所述gps信号;
41、转换模块,所述转换模块用于将所述gps信号转换为场端坐标系中的第二位置;
42、第二确定模块,所述第二确定模块用于根据所述第一位置和所述第二位置,确定车端的位置。
43、在一种可能的实现方式中,所述装置还包括:第三获取模块;
44、所述第三获取模块用于在场端中设置基站,并获取每个基站在所述场端坐标系的位置。
45、在一种可能的实现方式中,所述当车辆上的gps信号的信号强度符合要求之前,所述装置还包括:判断模块;
46、所述判断模块用于判断所述车辆上的gps信号的信号强度是否符合要求;
47、当gps信号的标志位为预设的标志位时,所述信号强度符合要求;
48、当gps信号的标志位非预设的标志位时,所述信号强度不符合要求。
49、在一种可能的实现方式中,所述装置还包括:第三确定模块;
50、所述第三确定模块用于当车辆上的gps信号的信号强度不符合要求时,所述第一位置为车端的位置。
51、在一种可能的实现方式中,所述第一确定模块根据所述第一信号、第二信号和第三信号,以及所述基站在场端坐标系中的位置,确定车辆在场端坐标系中的第一位置具体包括:
52、根据所述第一信号,确定所述基站中的第一基站与所述标签的第一距离;
53、根据所述第二信号,确定所述基站中的第二基站与所述标签的第二距离;
54、根据所述第三信号,确定所述基站中的第三基站与所述标签的第三距离;
55、根据所述第一距离、所述第二距离和所述第三距离,以及所述第一基站的位置、第二基站的位置和第三基站的位置,通过三角定位方法确定所述标签在所述场端坐标系的第一位置。
56、在一种可能的实现方式中,所述装置还包括:无线通信建立模块;
57、所述无线通信建立模块用于当所述车端进入所述场端时,所述场端的基站与所述车端的标签建立uwb通信。
58、在一种可能的实现方式中,场端设置多种类型的传感器,当所述传感器为图像传感器时,所述装置还包括:第四确定模块;
59、所述第四确定模块用于接收所述图像传感器发送的所述车端的图像信息;
60、根据所述图像信息、预设的图像坐标系和场端坐标系的映射关系,确定所述车端的第三位置;
61、根据所述第一位置,和/或,所述第二位置,和/或,所述第三位置,确定车端的位置。
62、在一种可能的实现方式中,场端设置多种类型的传感器,当所述传感器为激光雷达时,所述装置还包括:第五确定模块;
63、所述第五确定模块用于接收所述激光雷达发送的激光点云信息;
64、根据所述激光点云信息,确定车端在激光点云坐标系的位置;
65、根据所述车端在激光点云坐标系的位置,以及预设的所述激光点云坐标系和场端坐标系的映射关系,确定所述车端的第四位置;
66、根据所述第一位置,和/或,所述第二位置,和/或,所述第三位置,和/或,所述第三四位置,确定车端的位置。
67、在一种可能的实现方式中,场端设置多种类型的传感器,当所述传感器为毫米波雷达时,所述装置还包括:第六确定模块;
68、所述第六确定模块用于接收所述毫米波雷达发送的测距信息;
69、根据所述测距信息,确定车端在毫米波雷达坐标系的位置;
70、根据所述车端在毫米波雷达坐标系的位置,以及预设的所述毫米波雷达坐标系和场端坐标系的映射关系,确定所述车端的第五位置;
71、根据所述第一位置,和/或,所述第二位置,和/或,所述第三位置,和/或,所述第四位置,和/或,所述第五位置,确定车端的位置。
72、本发明实施例第三方面提供了一种定位系统,所述系统包括第一方面的定位装置。
73、本发明实施例第四方面提供了一种定位部件,所述部件包括:至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行如本发明实施例第一方面中任一项所述的定位方法。
74、通过应用本发明实施例提供的定位方法,场端可以根据车端的标签和场端基站通信后,确定车端的位置,并且还可以在车端gps信号强度满足要求时,获取到车端gps信号,再对根据两种方法所得到的车端位置进行融合,从而得到车端的位置,提高了车端定位精度。进一步的,本技术还可以利用场端现有的传感器来进行定位,比如利用图像传感器来进行定位,进一步提高了车端定位的精度。再进一步的,本技术还可以结合激光雷达来进行定位,这更进一步的提高了车端定位的精度,再进一步的,本技术还可以根据毫米波雷达来进行车端的定位,这又更进一步的提高了定位精度。
- 还没有人留言评论。精彩留言会获得点赞!