基于激光距离传感技术的距离探测系统的制作方法
本发明涉及激光测距传感器,特别涉及基于激光距离传感技术的距离探测系统。
背景技术:
1、激光测距传感器是利用激光传输时间来测量距离的基本原理是通过测量激光往返目标所需时间来确定目标距离。关于激光测距传感器的距离探测系统,已有相关专利。比如申请号:cn202011428011.1公开了一种远距离高分辨率激光雷达及探测方法,包括用于激光点云数据处理以及各分系统的控制的主控与数据解算系统,变焦激光发射系统、激光扫描系统和激光接收系统分别与主控与数据解算系统连接;变焦激光发射系统包括依次设置的高重频高功率脉冲光纤激光器、光纤准直器和变焦光学系统;激光接收系统包括接收光学系统以及光电探测器apd;激光扫描系统为二维mems微扫镜。一种远距离高分辨率激光雷达的探测方法,采用主控与数据解算系统,首先通过调节变焦激光发射系统使其焦距为无穷远,保证激光在扫描的过程中,能够覆盖整个视场,对目标初测探测成像,得到目标的轮廓范围,然后调节变焦激光发射系统,对发射光束进行聚焦,对目标轮廓区域进行精密探测,其他区域不扫描;该发明通过第一次快速扫描对整个视场粗成像,以确定目标的轮廓范围,然后通过第二次扫描对目标轮廓范围进行精细成像。因此该发明而无需对整个视场进行精密扫描,成像速度快;实现目标的快速、精细探测。
2、然而上述发明虽然通过二次扫描的方式对远距离的目标进行精细成像,同时能提高雷达探测的效率,但在实际使用过程中仍存在以下几点问题:
3、1、现有技术中的激光雷达需要在物理上和功能上集成于其他结构复杂的系统中,在使用时,使用者需要同时理解和操作多个无关设备和软件才可完成激光雷达探测、跟踪或识别工作;
4、2、现有技术中,多用于利用激光距离传感器对静态目标进行探测,在对动态探测目标进行距离和速度的测试时,无法保证探测的精确性和稳定性,造成探测结果的误差大的情况。
5、3、现有技术中,无法依据激光距离传感器对探测物体进行准确的识别,成像效果差,无法将探测区域中探测物体的移动方向进行预测与判断,用户使用体验感差。
技术实现思路
1、本发明的目的在于提供基于激光距离传感技术的距离探测系统,利用激光距离传感器,用于高动态目标的距离和速度的测试,可以目标进行距离测量、方位以及速度的测量,提高探测的精确性和稳定性,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
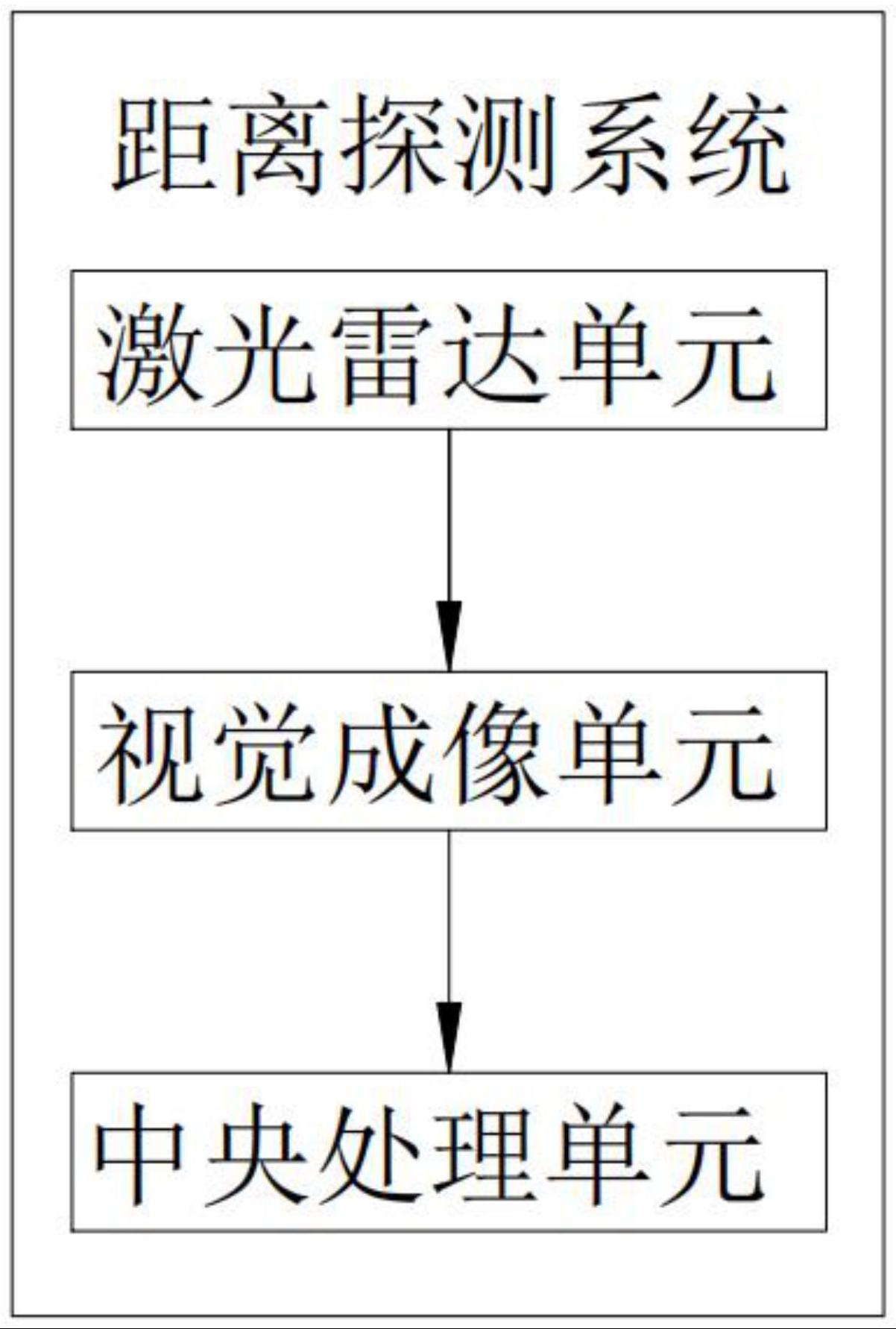
3、基于激光距离传感技术的距离探测系统,包括激光距离传感器和基于所述激光距离传感器的距离探测系统,所述距离探测系统包括:
4、激光雷达单元,用于控制激光距离传感器的发射激光脉冲光束和接收激光脉冲光束,基于所述接收激光脉冲光束的获取被探测物体的特征信号,同时,获取激光脉冲光束发射时间和反射时间;
5、视觉成像单元,用于基于所述被探测物体的特征信号的信号范围,确定视觉成像区域,视觉成像相机在所述视觉成像区域内实时获取区域内物体的表面数据,并在显示终端进行可视化显示;
6、中央处理单元,用于锁定目标探测物体,对所述目标探测物体进行二次发射激光脉冲光束;基于所述二次发射激光脉冲光束的反射激光脉冲光束获取目标探测物体的特征信号,确定所述目标探测物体在所述视觉成像区域内的初始方位,测出所述目标探测物体的移动方向和移动速度。
7、进一步的,所述激光雷达单元,包括:
8、光束控制模块,用于生成激光光束生成指令,激光距离传感器获取指令后提取指令中的目标指向数据,基于所述目标指向数据控制激光距离传感器向被测物体发送激光脉冲光束,同时,获取被测物体反射回来的激光反射回光线;
9、自动校时模块,用于系统每日对实时时钟和所述激光距离传感器进行自动对时;同时,获取所述激光距离传感器的激光脉冲光束发射与接收的时间数据。
10、进一步的,所述激光雷达单元,还包括:
11、标准化模块,用于从被测物体反射回来的激光反射回光线中获取被探测物体的特征信号,同时获取激光距离传感器的基础数据,确定获取到数据的标准数据格式;
12、并按照所述标准数据格式,对所述激光距离传感器中的监测数据、坐标数据与时间节点数据进行数据标准化,得到标准监测数据、标准坐标数据与标准时间数据。
13、进一步的,所述视觉成像单元,包括:
14、图像获取模块,用于获取视觉成像相机实时上传的图像数据,提取所述图像数据中的物体轮廓;
15、信号匹配模块,用于将所述被探测物体的特征信号与所述物体轮廓进行匹配,将所述物体轮廓立体化;
16、目标确定模块,用于基于所述被探测物体的特征信号的信号范围确定视觉成像区域,提取立体化后的物体特征数据,并将所述物体特征数据输入至物体特征数据库中进行识别,确定被探测物体名称。
17、进一步的,所述中央处理单元,包括:
18、目标数据确定模块,用于基于被探测物体名称锁定与所述被探测物体名称对应的目标探测物体;
19、指令生成模块,用于获取到所述接收激光脉冲光束的时间节点信号后,生成二次发生激光脉冲光束指令,同时,获取所述二次发射激光脉冲光束的反射激光脉冲光束获取目标探测物体的特征信号;
20、计算模块,用于基于发射激光脉冲光束和接收激光脉冲光束的间隔时间来确定所述发射激光脉冲光束的飞行时间,基于所述飞行时间输入至计算公式中计算所述激光距离传感器与被测物体的距离。
21、进一步的,所述计算模块,还用于确定被测物体的移动方向,基于所述计算公式计算被测物体的移动速度,并基于计算结果中的移动方向和移动速度来确定所述被测物体的目标位置。
22、进一步的,所述确定被测物体的移动方向,具体为:
23、将所述被探测物体的定位数据输入到所述时间轴,生成动态数据,在所述动态数据中提取被探测物体的初始位置,确定初始位置在视觉成像区域内的实际位置,分析被探测物体的位置特征;
24、将所述动态数据划分为若干个单位数据段,分别在每一个单位数据段中获取被探测物体的移动位置,获取初始位置和每一单位数据段的移动位置,建立被探测物体移动轨迹,根据所述移动轨迹生成被探测物体的移动特征;
25、根据被探测物体对应的位置特征和移动特征建立被探测物体的移动数据;分析所述移动数据包含的被探测物体所在视觉成像区域的方位,生成被探测物体的移动方向。
26、进一步的,所述中央处理单元,还包括建立被探测物体与移动方向、移动速度和与激光距离传感器的间隔距离之间关联关系,当调取任一时间的数据时,则针对被探测物体当前时间下的图像进行调取,将所述被探测物体的关联信息单独以列表形式呈现。
27、进一步的,所述基于所述目标指向数据控制激光距离传感器向被测物体发送激光脉冲光束,同时,获取被测物体反射回来的激光反射回光线,包括:
28、获取被测物体的三维轮廓数据,根据所述三维轮廓数据确定激光采样点和每个激光采样点与激光距离传感器之间的距离;
29、根据每个激光采样点与激光距离传感器之间的距离和激光的发射参数设置每个激光采样点的第一激光同步时间戳;
30、基于被测物体的三维轮廓数据确定相邻两个激光采样点的轮廓偏差;
31、将相邻两个激光采样点的轮廓偏差作为该邻两个激光采样点中首个激光采样点的校准因子;
32、根据所述校准因子生成每个激光采样点的采样优化函数,根据所述采样优化函数对该激光采样点的第一激光同步时间戳进行优化,获取优化后的第二激光同步时间戳;
33、根据每个激光采样点的第二激光同步时间戳生成检测被测物体的第一等效激光脉冲光束;
34、根据所述目标指向数据控制激光距离传感器向被测物体发送所述第一等效激光脉冲光束;
35、接收被测物体反射回来的第一激光反射数据集,对所述第一激光反射数据集进行拆分以获得每个激光采样点的第一激光反馈参数;
36、利用预设规则判断每个激光采样点的第一激光反馈参数是否合理,若是,根据所述第一激光反馈参数生成被测物体的第一激光检测点云数据,若否,基于每个激光采样点的预测反馈参数与激光反馈参数的偏差确定被测物体上的该激光采样点的激光反射特性;
37、根据每个激光采样点的激光反射特性对等效激光脉冲光束的脉冲发射参数进行调整以生成新的第二等效激光脉冲光束;
38、将被测物体对第二等效激光脉冲光束反射回来的第二激光反射数据集中每个激光采样点的第二激光反馈参数进行合理性评估直到其全部评估合理为止;
39、根据所述第二激光反馈参数生成被测物体的第二激光检测点云数据;
40、根据等效激光脉冲光束的光束散射特性确定每个激光采样点的脉冲光束的偏移度;
41、将每个激光采样点的脉冲光束的偏移度作为感知条件对第一激光检测点云数据或第二激光检测点云数据中的冗余点云数据进行感知剔除处理,获取处理后的第一激光检测点云数据或第二激光检测点云数据;根据处理后的第一激光检测点云数据或第二激光检测点云数据生成被测物体反射回来的激光反射回光线。
42、进一步的,所述根据每个激光采样点的第二激光同步时间戳生成检测被测物体的第一等效激光脉冲光束,包括:
43、根据每个激光采样点的第二激光同步时间戳确定该激光采样点的激光信号的初始频率和初始相位;
44、根据每个激光采样点的初始频率和初始相位生成检测被测物体的第一等效激光信号,其被描述为:
45、
46、其中,s表示为检测被测物体的第一等效激光信号,f(t)表示为激光信号的时间窗函数,n表示为激光采样点的数量,i表示为第i个激光采样点,sin表示为正弦,π表示为圆周率,pi表示为第i个激光采样点的激光信号的初始频率,ti表示为第i个激光采样点的第二激光同步时间戳对应的参数值,δi表示为第i个激光采样点的激光信号的初始相位;
47、根据检测被测物体的第一等效激光信号生成检测被测物体的第一等效激光脉冲光束;
48、根据所述目标指向数据控制激光距离传感器向被测物体发送所述等效激光脉冲光束;
49、根据被测物体反射回来回波信号获取第一激光反射数据集,此时,回波信号描述为:
50、
51、其中,s'表示为回波信号,a表示为激光距离传感器的激光反射控制增益,
52、r表示为激光距离传感器与被测物体之间的直线距离,c表示为光速,α表示为被测物体所处环境对于激光测距的环境增益因子,δ1i表示为第i个激光采样点的激光信号的传输相位延迟,δ2i表示为第i个激光采样点的激光信号的回波相位延迟。
53、与现有技术相比,本发明的有益效果是:
54、1.通过激光距离传感器向被测物体发送激光脉冲光束,直接测出被探测物体的速度大小、方向和轮廓,配合视觉成像相机获取图像数据,与被探测物体的特征信号相结合,将被探测物体立体化,并进行可视化展示,对远距离目标进行精细的成像,有效提高了系统的监测精度,对被测物体精准定位,减少测量误差,提高移动方向和移动速度的测量精准度。
55、2.通过光束控制模块根据探测物体的实际方位,可远程调整激光光束指令,根据需要对探测物体发送激光脉冲光束,其通过无线通信与常规的移动终端之间进行远程信息交互,用户可以通过移动终端直接远程调控激光距离传感器,实现远程操控,自动校时模块保证系统时间与激光距离传感器时间的准确,提高时间节点的精确,避免时间误差导致计算结果出现误差的情况,标准化模块通过对采集到的监测数据、坐标数据与时间数据进行标准化,为数据之间的匹配提供准确的数据基础,提高中央处理单元的分析计算能力和效率。
56、3.通过中央处理单元获取到接收激光脉冲光束的时间节点信号后,生成二次发生激光脉冲光束指令,同时,获取二次发射激光脉冲光束的反射激光脉冲光束获取目标探测物体的特征信号,通过二次扫描的方式将两侧特征信号进行对比,确定被测物体的移动特征,同时能提高雷达探测的效率;通过列表形式不仅可以使得图表具有统一的格式,还可以调取任一时间节点的数据实现整体与部分的转换,方便图表呈现与观测。
57、4.通过分析被探测物体在视觉成像区域的活动数据,可以得知当前在视觉成像区域的被探测物体的移动方位,利用数据分析法进行被探测物体轨迹分析,不仅可以快速获取不同被探测物体的移动速度,还可以分析被探测物体的移动方向,为后续分析被探测物体移动方向,以及判断被探测物体的目标位置的判断精准度做基础,在一定程度上提高了系统的稳定性和全面性,用于高动态目标的距离和速度的测试,可以目标进行距离测量、方位以及速度的测量,提高探测的精确性和稳定性。
- 还没有人留言评论。精彩留言会获得点赞!