一种基于决策树的单一干扰识别方法
本发明属于雷达信号处理,具体涉及一种基于决策树的单一干扰识别方法。
背景技术:
1、在日益复杂的电磁环境下,电子干扰与抗干扰的较量愈演愈烈,其重要性不言而喻。其中雷达作为现代电子战的主要设备和载体,针对雷达信号的干扰与抗干扰研究显得尤为重要。在实际的抗干扰过程中,双方首先需要获取对方施放的干扰类型,才能有针对性地做出抗干扰措施。因而如何利用雷达回波信号,识别其中包含的具体干扰类型,是有效抗干扰的重要前提。
2、现有的雷达信号干扰识别方法大多依赖于机器学习或深度学习模型进行分类识别,其存在的主要问题是计算量过大,无法提供实时性信号干扰识别,而这对于雷达而言显然是极为不利的。此外,一些干扰识别方法存在识别干扰类型有限,或是需要在满足特定条件的场景下进行识别,无法有效适用于真实环境中。也就是说,现有的干扰识别方法所识别的类别不足、精度不高且实时性较差。
技术实现思路
1、为了解决相关技术中存在的上述问题,本发明提供了一种基于决策树的单一干扰识别方法。本发明要解决的技术问题通过以下技术方案实现:
2、本发明提供一种基于决策树的单一干扰识别方法,包括:
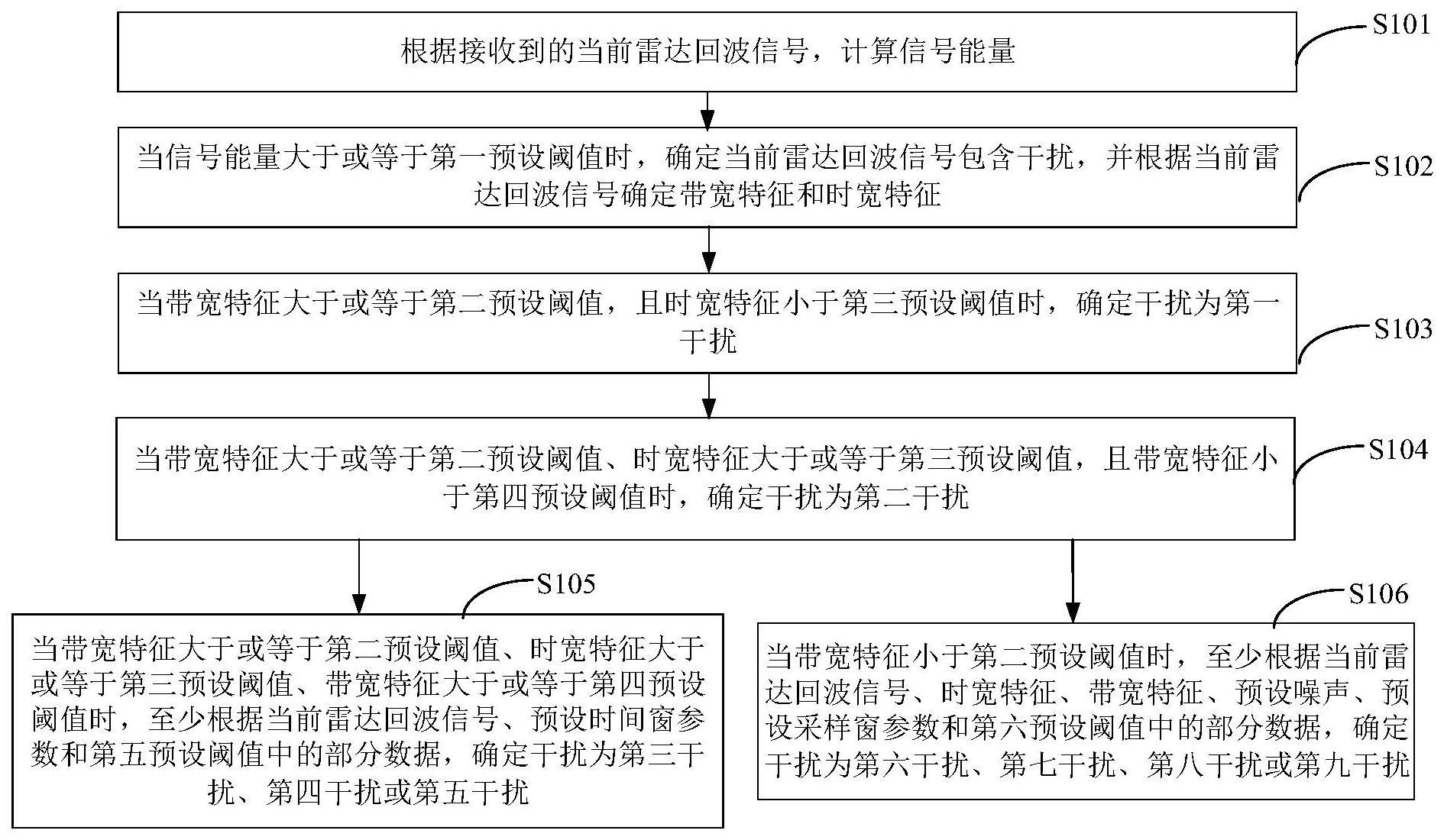
3、根据接收到的当前雷达回波信号,计算信号能量;
4、当所述信号能量大于或等于第一预设阈值时,确定所述当前雷达回波信号包含干扰,并根据所述当前雷达回波信号确定带宽特征和时宽特征;
5、当所述带宽特征大于或等于第二预设阈值,且所述时宽特征小于第三预设阈值时,确定所述干扰为第一干扰;
6、当所述带宽特征大于或等于第二预设阈值、所述时宽特征大于或等于所述第三预设阈值,且所述带宽特征小于第四预设阈值时,确定所述干扰为第二干扰;
7、当所述带宽特征大于或等于第二预设阈值、所述时宽特征大于或等于所述第三预设阈值、所述带宽特征大于或等于第四预设阈值时,至少根据所述当前雷达回波信号、预设时间窗参数和第五预设阈值中的部分数据,确定所述干扰为第三干扰、第四干扰或第五干扰;
8、当所述带宽特征小于所述第二预设阈值时,至少根据所述当前雷达回波信号、所述时宽特征、所述带宽特征、预设噪声、预设采样窗参数和第六预设阈值中的部分数据,确定所述干扰为第六干扰、第七干扰、第八干扰或第九干扰。
9、在一些实施例中,所述根据所述当前雷达回波信号确定带宽特征和时宽特征,包括:
10、根据所述当前雷达回波信号计算信号的带宽,得到所述带宽特征;
11、确定所述带宽特征的倒数,得到所述时宽特征。
12、在一些实施例中,所述第五预设阈值包括:第一子阈值和第二子阈值;所述预设时间窗参数包括:预设数量的时间窗;所述至少根据所述当前雷达回波信号、预设时间窗参数和第五预设阈值中的部分数据,确定所述干扰为第三干扰、第四干扰或第五干扰,包括:
13、根据所述当前雷达回波信号,确定当前信号均值;
14、根据所述当前雷达回波信号和所述当前信号均值,确定频域距偏度;
15、当所述频域距偏度大于或等于所述第一子阈值时,确定所述干扰为所述第三干扰;
16、当所述频域距偏度小于所述第一子阈值时,根据所述预设数量的时间窗和所述当前雷达回波信号,确定多时间窗频域矩偏度;
17、根据所述多时间窗频域矩偏度和所述第二子阈值之间的大小关系,确定出所述干扰为所述第四干扰或所述第五干扰。
18、在一些实施例中,所述根据所述当前雷达回波信号,确定当前信号均值,包括:
19、对所述当前雷达回波信号进行数字化采样处理,得到时域离散信号;
20、采用离散傅里叶变换将所述时域离散信号变换至频域,得到频域信号;
21、确定所述频域信号的均值,得到所述当前信号均值。
22、在一些实施例中,所述根据所述当前雷达回波信号和所述当前信号均值,确定频域距偏度,包括:
23、根据所述频域信号和所述当前信号均值,确定当前标准差;
24、根据所述频域信号、所述当前信号均值和所述当前标准差,确定所述频域距偏度。
25、在一些实施例中,所述根据所述预设数量的时间窗和所述当前雷达回波信号,确定多时间窗频域矩偏度,包括:
26、采用所述预设数量的时间窗,从所述当前雷达回波信号对应的频域信号中选取信号,得到局部信号;
27、确定所述局部信号的均值,得到当前局部均值;
28、根据所述局部信号和所述当前局部均值,得到当前局部标准差;
29、根据所述局部信号、所述当前局部均值和所述当前局部标准差,确定所述多时间窗频域矩偏度。
30、在一些实施例中,所述预设噪声为预设时域噪声;所述第六预设阈值包括:第三子阈值、第四子阈值和第五子阈值;预设采样窗参数包括:采样窗长度和初始采样位置;所述至少根据所述当前雷达回波信号、所述时宽特征、所述带宽特征、预设噪声、预设采样窗参数和第六预设阈值中的部分数据,确定所述干扰为第六干扰、第七干扰、第八干扰或第九干扰,包括:
31、根据所述当前雷达回波信号和所述时宽特征,确定时宽区间信号;
32、根据所述时宽区间信号、所述预设时域噪声和指示函数,确定时域连续性系数;
33、当所述时域连续性系数小于所述第三子阈值时,根据所述带宽特征与所述第四子阈值之间的大小关系,确定所述干扰为所述第六干扰或所述第七干扰;
34、当所述时域连续性系数大于或等于所述第三子阈值时,根据所述采样窗长度和所述初始采样位置,从所述时宽区间信号中采样出信号;
35、根据所述采样窗长度、采样出的信号和所述时域离散信号的峰值,确定时域特征;
36、根据所述时域特征和所述第五子阈值之间的大小关系,确定所述干扰为所述第八干扰或所述第九干扰。
37、在一些实施例中,所述根据所述当前雷达回波信号和所述时宽特征,确定时宽区间信号,包括:
38、根据所述当前雷达回波信号,得到时域离散信号;
39、根据所述时宽特征,从所述时域离散信号中确定时宽区间信号。
40、在一些实施例中,所述根据所述采样窗长度、采样出的信号和所述时域离散信号的峰值,确定时域特征,包括:
41、根据所述采样窗长度和采样出的信号,确定采样出的信号的均值;
42、对所述均值与所述时域离散信号的峰值作差,将得到的差值作为所述时域特征。
43、在一些实施例中,所述第一干扰为灵巧噪声干扰、所述第二干扰为噪声调频干扰、所述第三干扰为梳状谱干扰、所述第四干扰为扫频干扰、所述第五干扰为宽带压制干扰、所述第六干扰为全脉冲转发干扰、所述第七干扰为部分脉冲密集转发干扰、所述第八干扰为全脉冲密集转发干扰、所述第九干扰为间歇采样转发式干扰。
44、本发明具有如下有益技术效果:
45、通过本发明提供的干扰识别方法只需进行简单的数据计算和数值比较,便可确定出多种不同的干扰类型,无需涉及大量复杂的计算,且同时能够提高识别的精度、实时性和可靠性,从而,不仅可以对多种类型的干扰均能提供及时高可靠性的识别,还增加了雷达干扰识别的范围。
46、以下将结合附图及实施例对本发明做进一步详细说明。
- 还没有人留言评论。精彩留言会获得点赞!