一种基于毫米波雷达识别限高物体的方法与流程
1.本发明涉及限高物体识别技术领域,具体涉及一种基于毫米波雷达识别限高物体的方法。
背景技术:
2.隧道或涵洞等均限定允许通过车辆的最大高度,传统上司机只能靠目测来判断能否通过,由于视角受限,会有判断错误的事件发生,进而造成车辆顶部撞上限高架等限高物体。公开号为cn113561894 a的专利申请公布了一种基于双目立体视觉及4d毫米波雷达的限高检测车辆控制系统及其控制方法,其将双目立体视觉和4d毫米波雷达融合进行前方限高杆的高度探测,该方案具有如下的缺陷:首先,视觉检测设备价格昂贵,且容易受到恶劣天气的影响,造成误判或漏判的情况;其次,双目立体视觉与4d毫米波雷达融合,会致使资源浪费。
技术实现要素:
3.本发明的目的是针对现有技术存在的不足,提供一种基于毫米波雷达识别限高物体的方法。
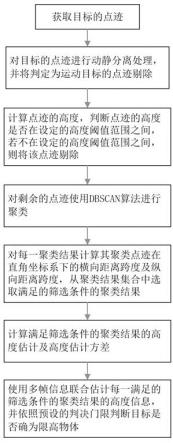
4.为实现上述目的,本发明提供了一种基于毫米波雷达识别限高物体的方法,包括:基于安装在车辆前侧的毫米波雷达模块获取目标的点迹,n为大于2的自然数,并对目标的点迹进行动静分离处理,并将判定为运动目标的点迹剔除,将剩余的点迹记为,∈;根据保留的目标的点迹的径向距离r及仰俯角度计算该点迹的高度h为:判断点迹的高度h是否在设定的高度阈值范围之间,若不在设定的高度阈值范围之间,则将该点迹剔除,将剩余的点迹记为,∈;对剩余的点迹使用dbscan算法进行聚类,将聚类结果集合记为,其中,m为大于2的自然数,每一聚类结果,i=1,2,...,m;对每一聚类结果计算其聚类点迹在直角坐标系下的横向距离跨度及纵向距离跨度,其中,为聚类结果中的聚类点迹在y轴方向的最大值,为聚类结果中的聚类点迹在y轴方向的最小值,为聚类结果中的聚类点迹在x轴方向的最大值,为聚类结果中的聚类点迹在x轴方向的最小值,从聚类结果集合中选取满足的筛选条件的聚类结果;计算满足筛选条件的聚类结果的高度估计及高度估计方差;
使用多帧信息联合估计每一满足的筛选条件的聚类结果的高度信息,并依照预设的判决门限判断目标是否确为限高物体。
5.进一步的,所述动静分离处理的方式具体如下:将目标的点迹的径向速度v分解到平面上得到,并分解到z轴方向得到;获取车辆在x轴的速度,并将速度投影到平面上得到,判断与之和是否小于速度阈值thr1,且是否小于速度阈值thr2,是,则将该点迹判定为静止目标的点迹,否则,将该点迹判定为运动目标的点迹。
6.进一步的,所述筛选条件为且且且,其中,和分别为纵向跨度阈值和横向跨度阈值。
7.进一步的,根据信噪比snr加权计算满足筛选条件的聚类结果的高度估计及高度估计方差,具体如下:其中,为聚类结果的总信噪比,为聚类结果中第j个点迹的信噪比,j=1,2,...,a,为为聚类结果中第j个点迹的高度,为聚类结果中第j个点迹的高度方差。
8.进一步的,使用多帧信息联合估计每一满足的筛选条件的聚类结果的高度信息的方式具体如下:其中,为k时刻使用多帧信息联合估计出的每一满足的筛选条件的聚类结果的高度估计,为k-1时刻使用多帧信息联合估计出的每一满足的筛选条件的聚类结果的高度估计,为k时刻根据信噪比snr加权计算出的满足筛选条件的聚类结果的高度估计,为k时刻使用多帧信息联合估计出的每一满足的筛选条件的聚类结果的高度估计方差,为k-1时刻使用多帧信息联合估计出的每一满足的筛选条件的聚类结果的高度估计方差,为k时刻根据信噪比snr加权计算出的满足筛选条件的聚类结果的高度估计方差,k为大于0的自然数。
9.进一步的,所述设定的高度阈值范围为1-4.7米。
10.有益效果:本发明基于单个毫米波雷达实现限高物体的识别,无需与双目立体视觉进行融合,即可精准的识别出限高物体及其高度信息,识别精度不易受到恶劣天气的影响,降低限高物体识别提醒的成本。
附图说明
11.图1是本发明实施例的基于毫米波雷达识别限高物体的方法的流程示意图。
具体实施方式
12.下面结合附图和具体实施例,进一步阐明本发明,本实施例在以本发明技术方案为前提下进行实施,应理解这些实施例仅用于说明本发明而不用于限制本发明的范围。
13.如图1所示,本发明实施例提供了一种基于毫米波雷达识别限高物体的方法,包括:基于安装在车辆前侧的毫米波雷达模块获取目标的点迹,n为大于2的自然数,即表示第n个点迹。然后对目标的点迹进行动静分离处理,并将判定为运动目标的点迹剔除,将剩余的点迹记为,∈。上述毫米波雷达模块可以安装在车辆的前保险杠处,一般情况下,它最远探测距离为300米,俯仰角为
±
15
°
。
14.上述动静分离的方式具体如下:将目标的点迹的径向速度v分解到平面上得到,并分解到z轴方向得到。获取车辆在x轴的速度,并将速度投影到平面上得到,判断与之和是否小于速度阈值thr1,且是否小于速度阈值thr2,若与之和小于速度阈值thr1且小于速度阈值thr2,则将该点迹判定为静止目标的点迹,否则,将该点迹判定为运动目标的点迹。判定为运动目标的点迹剔除后,即不参与后续处理。需要说明的是,上述车辆的速度可通过将毫米波雷达模块接入车身信息can总线来获取。
15.根据保留的目标的点迹的径向距离r及仰俯角度计算该点迹的高度h为:判断点迹的高度h是否在设定的高度阈值范围之间,若不在设定的高度阈值范围之间,则将该点迹剔除,将剩余的点迹记为,∈。一般可将高度阈值范围的下限设置为1米,低于1米的直接予以剔除。一般城市道路的龙门架高度为14米以上,限高杆高度一般为4.5米以下,可以以4.5米为界限,设置+20cm的误差冗余,即将高度阈值范围的上限设置为4.7米,若点迹的高度h高于高度阈值4.7米,则予以剔除,由此可判断前方高处障碍物是龙门架还是限高杆等限高物体。
16.对剩余的点迹使用dbscan算法进行聚类,将聚类结果集合记为,其中,m为大于2的自然数,每一聚类结果
,i=1,2,...,m,a为大于2的自然数。
17.对每一聚类结果计算其聚类点迹在直角坐标系下的横向距离跨度及纵向距离跨度,其中,为聚类结果中的聚类点迹在y轴方向的最大值,为聚类结果中的聚类点迹在y轴方向的最小值,为聚类结果中的聚类点迹在x轴方向的最大值,为聚类结果中的聚类点迹在x轴方向的最小值,从聚类结果集合中选取满足的筛选条件的聚类结果。该筛选条件优选为为且且且,其中,和分别为纵向跨度阈值和横向跨度阈值。满足以上筛选条件的点迹对于的目标,可视为准限高物体。
18.计算满足筛选条件的聚类结果的高度估计及高度估计方差。具体的,优选根据信噪比snr加权进行计算,计算方式具体如下:其中,为聚类结果的总信噪比,为聚类结果中第j个点迹的信噪比,j=1,2,...,a,为为聚类结果中第j个点迹的高度,为聚类结果中第j个点迹的高度方差。
19.使用多帧信息联合估计每一满足的筛选条件的聚类结果的高度信息,并依照预设的判决门限判断目标是否确为限高物体。使用多帧信息联合估计每一满足的筛选条件的聚类结果的高度信息的方式具体如下:其中,为k时刻使用多帧信息联合估计出的每一满足的筛选条件的聚类结果的高度估计,为k-1时刻使用多帧信息联合估计出的每一满足的筛选条件的聚类结果的高度估计,为k时刻根据信噪比snr加权计算出的满足筛选条件的聚类结果的高度估计,为k时刻使用多帧信息联合估计出的每一满足的筛选条件的聚类结果的高度估计方差,为k-1时刻使用多帧信息联合估计出的每一满足的筛选条件的聚类结果的高度估计方差,为k时刻根据信噪比snr加权计算出的满足筛选条件的聚类结果的高度估计方差,k为大于0的自然数。需要说明的是,当k的取值为1时,对应为初始时刻,此时,。
20.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,其它未具体描述的部分,属于现有技术或公知常识。在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1