一种均匀面阵中降维传播算子的二维DOA估计方法
本发明属于阵列信号处理doa估计,尤其涉及一种均匀面阵中降维传播算子的二维doa估计方法。
背景技术:
1、阵列信号处理时信号处理的一个重要分支,其中的二维doa估计是阵列信号处理的一个重要内容,也是阵列信号方向重要的研究领域。由于二维doa估计可以更加准确的定位到某一确定空间中的多个感兴趣的空间信号的方向角与俯仰角,所获取的信息量更大,使得近年来关于二维doa估计的相关内容越来越受到人们的关注。
2、现有的关于doa估计的二维pm算法的角度估计精度很高,许多学者将二维pm算法运用于双l型阵列、立体十字型互耦阵列、双平行线阵等doa估计中,得到了较好的doa估计性能。但是传统二维pm算法进行doa估计时需要进行全局谱峰搜索,这也带来了高维搜索问题,计算复杂度大大增加。为了解决上述问题,本发明提出了一种均匀面阵中降维传播算子的二维doa估计方法。
技术实现思路
1、发明目的:为了解决现有技术存在的问题,本发明提供了一种均匀面阵中降维传播算子的二维doa估计方法,在保证估计性能的同时显著降低了计算复杂度,易于实时处理。
2、技术方案:本发明所述的一种均匀面阵中降维传播算子的二维doa估计方法,包括以下步骤:
3、一种均匀面阵中降维传播算子的二维doa估计方法,包括以下步骤:
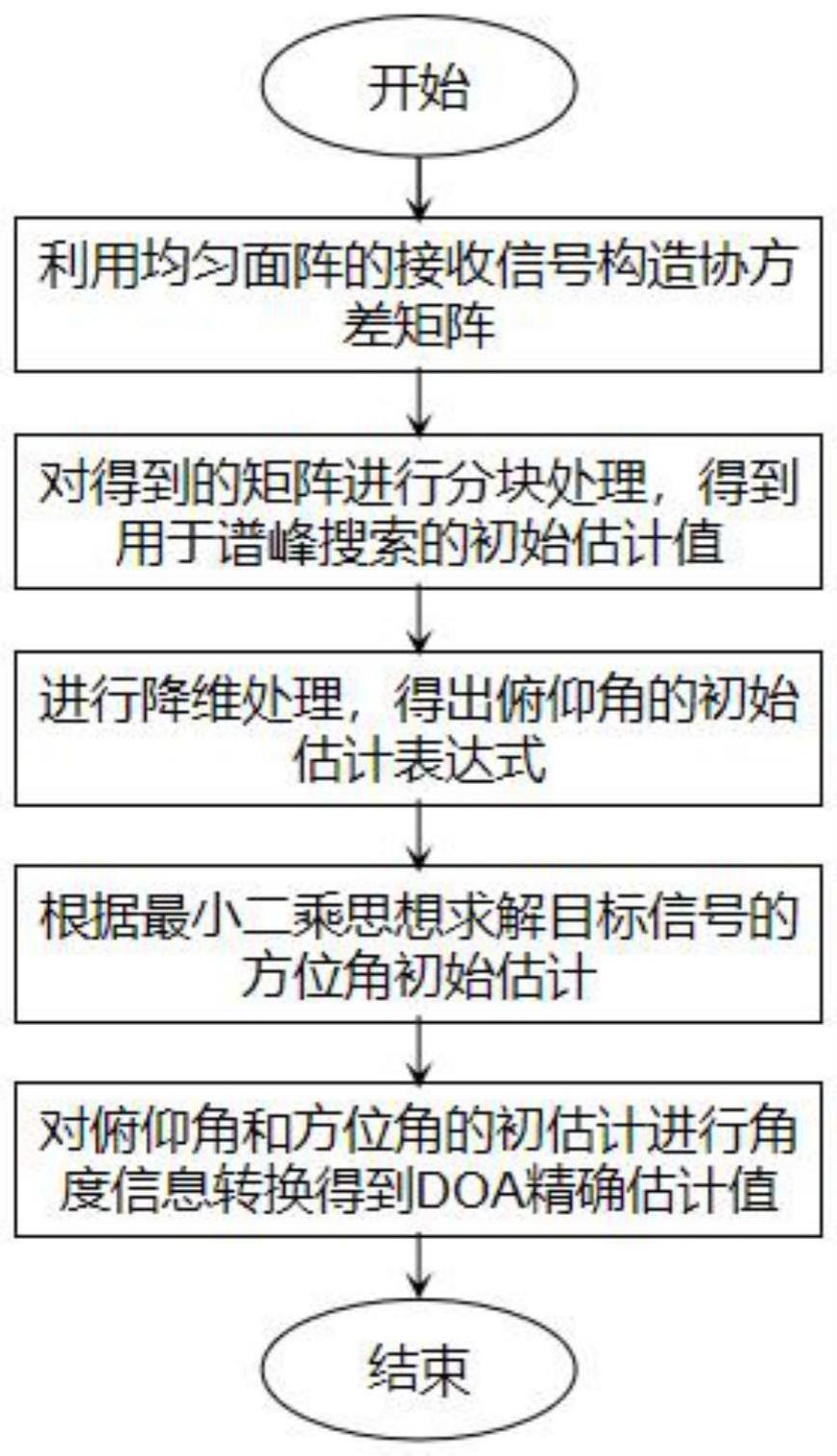
4、1)构造均匀面阵的信号模型,得到接收信号模型x(t),构造所述接收信号模型x(t)的协方差矩阵
5、2)对构造的协方差矩阵进行分块处理,通过传播算子矩阵的旋转不变性进行初始估计,得到用于谱峰搜索的初始估计值
6、3)通过降维处理,将二维优化问题转变为一维优化问题,进行一维局部谱峰搜索获得俯仰角u的估计值
7、4)根据最小二乘思想获取方位角v的估计值
8、5)利用估计值和得到均匀面阵中的二维doa精确估计值
9、优选的,步骤1)中:
10、所述均匀面阵共有m×n个均匀分布的阵元,m与n分别为x轴与y轴上的阵元个数,x轴与y轴上的相邻阵元间距均为d,且d≤λ/2,λ为波长,其中将每一列的阵元集合称作一个子阵,则有子阵1,2,…,n,…,n,共n个子阵;
11、假设某一空间有k个信号源以二维波达方向θk,入射到所述均匀面阵上,其中θk,分别表示第k(k=1,2,…,k)个信号源的仰角与方位角,定义接收信号x(t)为:
12、
13、其中:
14、
15、
16、
17、
18、
19、其中:为kronecker乘积,为方向矩阵ay和ax的khatri-rao乘积;
20、为信号源矢量,sk(t)为第k个信号源矢量,(·)t为转置;n(t)=[n1(t)t,n2(t)t,…,nn(t)t]t为所述均匀面阵的加性高斯白噪声,nn(t)为子阵n的加性高斯白噪声;为x轴上的信号源方向向量,为y轴上的信号源方向向量;
21、构造接收信号x(t)的协方差矩阵为:
22、
23、其中,l为快拍数,()h表示共轭转置。
24、优选的,步骤2)中:
25、定义参量u和v分别为将x轴与y轴上的信号源方向向量和转化为:
26、ax(v)=[1,ej2dv/λ,…,e-j2πd(n-1)v/λ]t
27、ay(u)=[1,e-j2πdu/λ,…,e-jπ2d(m1)u/λ]t
28、构造矩阵pc为:
29、
30、其中,p为传播算子,ik为k阶单位矩阵,()h为共轭转置;
31、将矩阵pc划分为n块:
32、pc=pc1,pc2,…,pcnt
33、其中,矩阵n=1,…,n;
34、分别构造矩阵p1和p2:
35、p1=pc1,pc2,…,pc(n-1)t
36、p2=pc2,pc3,…,pcnt
37、得到:
38、p2=p1t-1φt
39、其中,为对角矩阵,uk为第k个信号源的俯仰角,t为k×k阶的满秩矩阵,然后将p1+·p2进行特征值分解,记得到的第k个特征值为pk,(·)+为求广义逆,·表示相乘,从而得出uk的初始估计值为:
40、
41、其中k=1,2,,k。
42、优选的,步骤3)中:
43、定义矩阵q:
44、
45、其中,p为传播算子,imn-k为mn-k阶单位矩阵;
46、定义参数v(u,v):
47、
48、将v(u,v)变形为:
49、
50、为了便于后续的计算,令参数im为m阶单位矩阵;
51、用e1hax(v)=1来消除ax(v)=0m的平凡解,其中矩阵考虑到e1hax(v)=1,则将变形之后的v(u,v)重构为:
52、
53、然后构造代价函数l(u,v):
54、l(u,v)=ax(v)hc(u)ax(v)-ω(e1hax(v)-1)
55、其中,ω为一个常数,则有:
56、
57、则有ax(v)=μc(u)-1e1,由于e1hax(v)=1,则μ=1/e1hc-1(u)e1为常量,所以ax(v)表示为:
58、
59、结合得到俯仰角u的估计值
60、
61、将估计值用另一种表示方式为:
62、
63、优选的,步骤4)中:
64、在区间内对参量u进行一维局部搜索,得到c-1(u)中第(1,1)元素中最大的k个值,其中δu→0;这最大的k个值的峰值(u1,u2,…,uk)便与sinθksinφk,(k=1,2,…,k)的估计值相对应;
65、然后求出k个导向矢量
66、由于得出:
67、gk=-angle(ax(vk))=0,2πdvk/λ,…,2π(m-1)dvk/λt=vkq
68、为了便于进一步推导,定义参数q=0,2πd/λ,…,2π(m-1)d/λt;归一化再通过最小二乘法求vk,最小二乘法则为:
69、
70、其中:e=[1m,q],
71、ck1是vk的估计值;则ck的解为:
72、
73、得到vk的估计值
74、优选的,步骤5)中:
75、
76、
77、将和代入上式即得到均匀面阵中的二维doa精确估计值
78、有益效果:与现有技术相比,本发明的有益效果:本发明所提算法不需对接收信号的协方差矩阵进行特征值分解,而是首先利用传播算子矩阵的旋转不变性进行初始估计,然后在通过降维处理,将二维优化问题转变为一维优化问题,仅需一维局部谱峰搜索即可获得更加精确的估计值,同时还可以实现参数估计角度的自动配对,角度估计性能与2d-esprit算法估计性能相近;同时,与均匀面阵中传统的二维pm算法相比,所提算法极大的降低了计算复杂度;本发明可以在保证估计性能的情况下显著降低计算复杂度。
- 还没有人留言评论。精彩留言会获得点赞!