感应模组、人体感应器及人体感应探测系统的制作方法
本技术涉及人体感应设备的领域,尤其是涉及一种感应模组、人体感应器及人体感应探测系统。
背景技术:
1、人体感应探测技术已经具体应用于安防监控和节能控制等领域中,目前常见的人体感应探测设备是内置有热释电红外传感器的人体感应器。热释电红外传感器能够接收来自环境中的红外辐射能量,由于自然界中除黑体外的任何物体均向外辐射红外线,并且红外线的波长服从维恩位移定律,人体本身就会向外辐射具有特定波长的红外线,因此利用热释电红外传感器探测到人体的红外线,便能够获取人体的活动状态,从而在预设的范围内感应检测到人体的存在。
2、如在节能控制的领域中,人体感应器可设置于过道楼梯、公共走廊等位置中,并且串联照明系统,人体感应器可在夜间监视动情,只要人员出现在探测范围内,人体感应器则向照明系统发送信号以在预设时间内自动照明;人体感应器也设置于图书馆、自习室等公共区域中,并且串联照明系统或空调系统,人体感应器可实时检测在探测范围中出现的人员,照明系统自动调节照明亮度或空调系统自动调节工作模式。如在安防监控的领域中,人体感应器可设置于隐蔽位置并串联防盗报警器,人体感应器实时检测在探测范围中出现的人员,防盗报警器基于人体感应器的检测结果执行报警任务。
3、在上述具体应用中,热释电红外传感器的探测范围和探测灵敏度均影响了人体感应器的工作性能,而为了提高其探测范围和探测灵敏度,现有技术中常在热释电红外传感器的探测端加上菲涅尔透镜,菲涅尔透镜一方面能够将人体辐射出的红外线聚集到热释电红外传感器的敏感元上,从而加大探测的范围,另一方面,菲涅尔透镜也能对入射的红外线做周期性的遮蔽,使热释电红外传感器能够较为稳定地输出连续信号。但是,热释电红外传感器和菲涅尔透镜之间为固定式安装(如通过螺栓安装固定),在人体感应器产品出厂后,热释电红外传感器和菲涅尔透镜正常情况下是不分离的,导致热释电红外传感器单次探测的范围是固定不变的,而人体感应器的单次探测只能局限于此范围,局限性较大。
4、实用新型专利号cn212645913u公开了一种红外检测装置及安装该红外检测装置的显示终端,红外检测装置包括菲涅尔透镜和数字型热释电红外传感器;菲涅尔透镜用于对红外线进行聚焦并沿透镜单元所划分的探测区域进行传播;数字型热释电红外传感器用于感应探测区域内红外线的强度变化并输出电信号。上述的红外检测装置通过设置菲涅尔透镜以快捷地对探测区域红外线的强度变化进行感应,但是局限于菲涅尔透镜所提供的大范围的、单一的感应检测。
5、发明专利公开号cn110213862a公开了一种存在式人体红外检测的智能控制器,此智能控制器包括菲涅尔透镜、人体红外传感器以及处理模块,当人体红外传感器在检测范围之内感应到人体时,人体红外传感器向处理模块发送信号,处理模块向发给照明灯具信号,以使照明灯具亮灯,但是同样也局限于菲涅尔透镜所提供的大范围的、单一的感应检测。
技术实现思路
1、本发明的主要发明目的一是提供一种感应模组,通过对感应模组的有效感应范围进行调节的设计,调节单次人体感应探测的范围,解决探测范围局限性较大的问题。
2、本发明的主要发明目的二是提供一种人体感应器,通过设置具有有效感应范围可调节功能的感应模组,解决探测范围局限性较大的问题。
3、本发明的主要发明目的三是提供一种人体感应探测系统,通过控制感应模组切换不同的有效感应范围,解决探测范围局限性较大的问题。
4、本发明的主要发明目的一是通过以下技术方案得以实现的:
5、一种感应模组,包括:
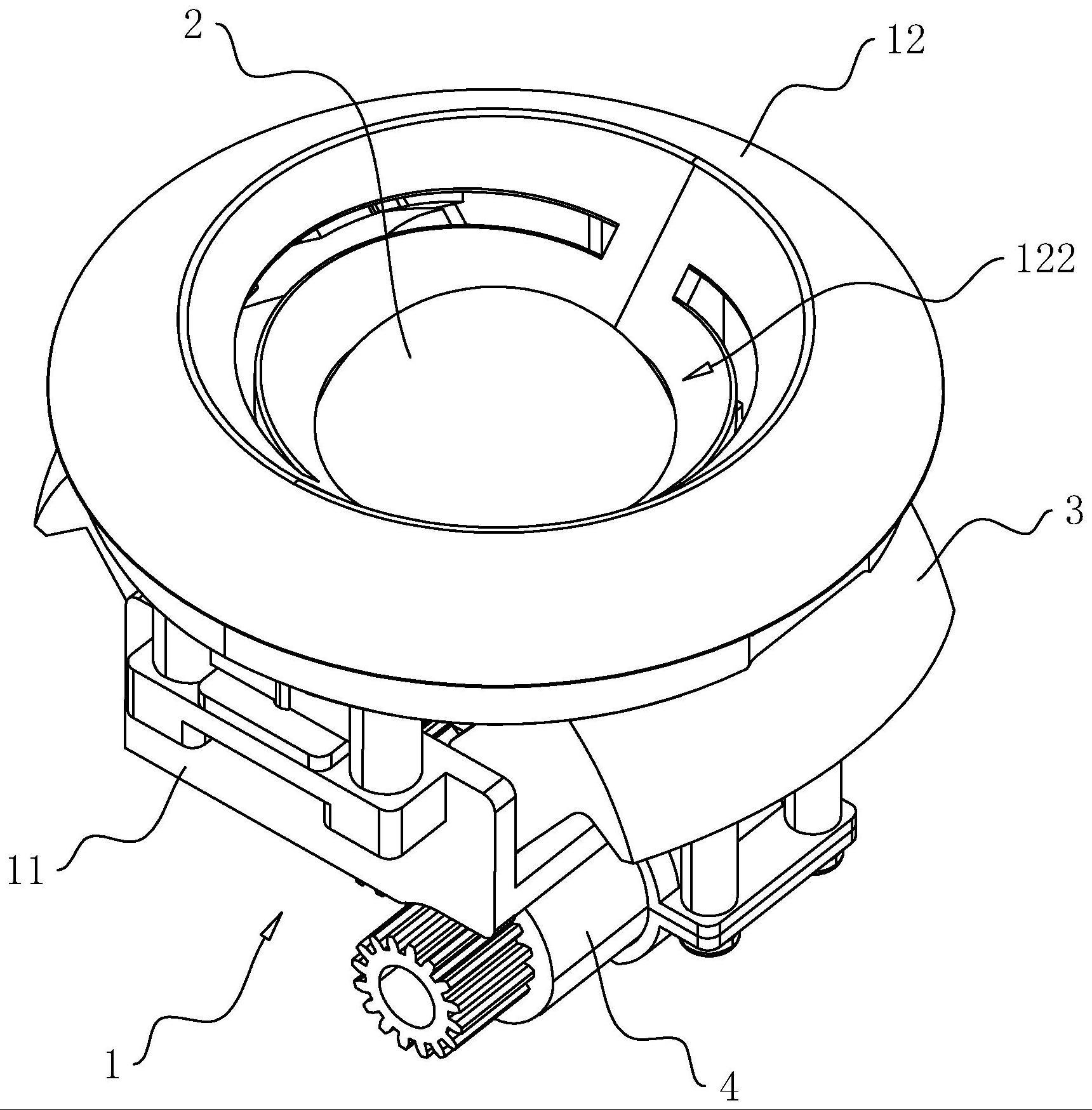
6、壳体;
7、探头,设置于所述壳体,所述壳体设置有供所述探头接收信号的感应口,所述探头具有第一感应区域;
8、阻挡组件,活动安装于所述壳体,所述阻挡组件能够遮挡所述感应口,且所述阻挡组件能够通过移动方式调节所述感应口的遮挡面积,使所述探头具有第二感应区域,所述第二感应区域小于所述第一感应区域;
9、驱动组件,设置于所述壳体并连接于所述阻挡组件,所述驱动组件被配置为驱动所述阻挡组件发生移动,以使所述探头的有效感应范围被动的由所述第一感应区域至所述第二感应区域产生变化。
10、通过采用上述技术方案,利用阻挡组件可活动于壳体的设计,可以通过阻挡组件活动至不同的状态去调节感应口的遮挡面积,从而使探头具有不同面积大小的第一感应区域和第二感应区域,第一感应区域和第二感应区域分别代表了探头不同的有效感应范围。利用驱动组件驱使阻挡件发生活动的设计,驱动组件可驱使阻挡组件发生活动,以使探头的有效感应范围被动的从第一感应区域变化至第二感应区域,完成对探头的有效感应范围的调节控制。探头在需要使用较大的有效探测范围进行探测时,可将探头调节至第一感应区域,增大扫描视角范围;探头在需要使用较小的有效探测范围进行探测时,可将探头调节至第二感应区域,减少扫描视角范围。
11、可选的,所述阻挡组件包括:
12、挡片,用于遮挡所述感应口;
13、支撑轴,转动连接于所述壳体;
14、连接件,两端分别连接于所述挡片、所述支撑轴;所述支撑轴能够通过转动方式带动所述连接件摆动,以带动所述挡片围绕所述探头在所述感应口处移动。
15、通过采用上述技术方案,连接件设置于支撑轴和挡片之间,支撑轴通过转动方式带动连接件摆动,连接件通过摆动方式带动挡片围绕支撑轴做圆周运动,从而使挡片在感应口处移动。
16、可选的,所述挡片设置有用于提供所述第二感应区域的探测窗,所述探测窗贯穿所述挡片,当所述挡片处于闭合状态时,所述探测窗和所述探头经过一指向所述探头探测方向的基准中线。
17、通过采用上述技术方案,利用探测窗的位置设计,当挡片处于闭合状态时,探测窗正对探头,挡片对感应口进行部分遮挡,环境中的信号依然可通过探测窗进入感应口,从而为探头提供第二感应区域。
18、可选的,所述挡片的数量至少为二,每一个所述挡片均配置有与其对应的所述支撑轴。
19、通过采用上述技术方案,利用多个挡片配合遮挡感应口的设置,减少单个挡片的活动行程,提升阻挡组件发生状态切换的效率。
20、可选的,所述挡片的数量为二,所述挡片接近邻近所述挡片的一侧设置有探测凹槽;当所述两所述挡片移动至闭合状态时,两所述挡片能够覆盖所述感应口,且两所述探测凹槽能够形成供所述探头接收信号的探测窗。
21、通过采用上述技术方案,每一个挡片均设置有一个探测凹槽,当各个挡片相对靠拢闭合时,位于各个挡片上的各个探测凹槽围成探测窗。
22、可选的,每一个所述连接件均设置有磁性件,当各个所述挡片处于闭合状态时,相邻的各个所述磁性件相互吸引,以使各个所述挡片保持于闭合状态。
23、通过采用上述技术方案,邻近的各个磁性件之间相互吸引,通过吸引力使得各个挡片能够较为稳定保持于闭合状态,以提高探测窗的完整性。另一方面,受驱动组件的行程范围的限制,或者受驱动组件与支撑轴之间传动效率的影响,两个挡片切换至闭合状态后可能会存在间隙,通过两个磁性件之间的吸引力可以推动挡片,使得各个挡片保持相互抵接,以提高探测窗的稳定性。
24、可选的,所述挡片设置有定位凸块和用于配合所述定位凸块的定位凹槽;当各个所述挡片处于闭合状态时,任一所述挡片的所述定位凸块能够插接于邻近所述挡片的所述定位凹槽中。
25、通过采用上述技术方案,当两挡片处于闭合状态时,其中一个挡片上的各个定位凸块均能够与另外一个挡片上的各个定位凹槽卡接配合,此卡接配合对两个挡片具有限位作用,限制两个挡片在合拢后发生的相对移动,减少松动,并且使得两个探测凹槽能够对准,从而使探测窗维持较为完整的形状。
26、可选的,所述定位凸块的两侧朝远离所述挡片的方向逐渐收窄,所述定位凹槽的形状与所述定位凸块的形状相匹配。
27、通过采用上述技术方案,在两个挡片逐渐接近的过程中,定位凸块的两侧和定位凹槽的两侧内壁之间具有相互导向的作用,使定位凸块能够更加顺利地进入定位凹槽中,减少发生卡死的风险。
28、本发明的主要发明目的二是通过以下技术方案得以实现的:
29、一种人体感应器,其特征在于,包括如上述任一技术方案的感应模组,人体感应器还包括:头部外壳,用于安装所述感应模组;
30、主体外壳,转动连接于所述头部外壳,所述头部外壳与所述主体外壳能够绕第一轴线发生相对转动;
31、主体底座,转动连接于所述主体外壳,所述主体外壳与所述主体底座够绕第二轴线发生相对转动,第一轴线与第二轴线具有夹角。
32、通过采用上述技术方案,利用对应于第一轴线和第二轴线的上下左右各个方向的转动,感应模组可根据系统控制,对多个方向的位置进行扫描。
33、一种人体感应探测系统,其特征在于,包括如上述任一技术方案的感应模组,人体感应探测系统还包括:
34、切换触发模块,用于判断是否满足状态切换条件,根据判断结果输出状态切换信息;
35、调节控制模块,用于基于状态切换信息,生成切换驱动信息,并将切换驱动信息发送至所述驱动组件,以使所述驱动组件根据切换驱动信息驱使所述阻挡组件发生移动。
36、通过采用上述技术方案,在大视角模式时,由于阻挡组件处于打开状态,感应模组的有效探测范围较大,可提高人体感应的范围和效率,适用于对正在活动的人体的感应检测中。在感应模组需要对静止的人体进行检测时,需要通过感应模组主动发生移动(上下左右等方向的转动)去检测而静止的人体,但是,若在大视角模式进行感应探测,由于感应模组的有效探测范围较大,感应模组的移动会受表面流动的气流以及所探测范围的环境温度差发生误判,比如,菲涅尔透镜探测角度为120°,在此范围中,左侧区域环境温度跟右侧区域环境温度可能不一样,存在温度差,而当感应模组发生转动时,就相当于探测到了温度的变化,从而会误动作输出,误以为有人体存在。因此,在对静止的人体进行感应探测时,需要切换至小视角模式,降低感应模组的有效探测范围,提高静态人体感应的准确率。
37、综上所述,本技术具有以下有益效果:
38、1.利用阻挡组件可活动于壳体的设计和驱动组件驱使阻挡件发生活动的设计,探头在需要使用较大的有效探测范围进行探测时,可将探头调节至第一感应区域,增大扫描视角范围;探头在需要使用较小的有效探测范围进行探测时,可将探头调节至第二感应区域,减少扫描视角范围。
39、2.利用对应于第一轴线和第二轴线的上下左右各个方向的转动,感应模组可根据系统控制,对多个方向的位置进行扫描。
40、3.在大视角模式时,由于阻挡组件处于打开状态,感应模组的有效探测范围较大,可提高人体感应的范围和效率,适用于对正在活动的人体的感应检测中;在对静止的人体进行感应探测时,需要切换至小视角模式,降低感应模组的有效探测范围,提高静态人体感应的准确率。
- 还没有人留言评论。精彩留言会获得点赞!