一种复杂电磁环境下四通道雷达单脉冲测角方法与系统与流程
本发明属于制导跟踪雷达信号处理,尤其涉及一种复杂电磁环境下四通道雷达单脉冲测角方法与系统。
背景技术:
1、角度估计是雷达系统的主要功能之一,雷达系统往往需要根据角度测量结果开展下一步目标定位以及目标跟踪功能。
2、在雷达系统应用环境中,经常出现敌方干扰机释放的有源干扰信号,用来干扰雷达系统的正常工作。由于有源干扰信号往往很强,雷达系统时常会出现检测不到目标信号,或者只检测出由干扰信号产生的假目标的现象。此时,若采用检测到的假目标进行角度测量,测量得到的角度值往往是错误的,测量结果也影响到目标定位,导致无法对目标进行稳定跟踪。有源干扰信号的存在,对雷达系统角度估计造成很大影响。因此,在雷达系统中,必须提高复杂电磁环境下的抗干扰能力和角度测量精度。
3、以往的单脉冲测角方法是:雷达系统采集目标回波信号,对和通道中同一距离单元的多次回波信号进行相参积累,即进行傅里叶变换,把时域信号变换为时频域信号,在时频域中采用一定长度的滑窗,对时频域中每个单元进行前后窗内相邻单元恒虚警检测,检测到目标后,记录目标在时频域中的位置与幅度,再对差通道进行相同的相参积累处理,找到与和通道目标所在时频域中相同的位置,并记录目标在差通道中的幅度,最后计算目标差比和的值,与预先测量的s曲线进行对照,估计出目标的角度。由于有源干扰的存在,时频域中目标信号较小,时常出现检测到假目标或者检测不到目标的现象,前者导致单脉冲测角的结果是干扰所在角度位置,后者的测量结果则是错误的,因此单脉冲测角方法必须先提高复杂电磁环境下的抗干扰能力,保证目标检测不会发生错误,再提高角度测量的精度。
4、上述方法在实施过程中存在在复杂干扰环境下角度测量精度低或测量结果错误的现象,导致雷达系统目标定位错误以及目标跟踪不上的明显缺陷。
技术实现思路
1、本发明目的在于提供一种复杂电磁环境下四通道雷达单脉冲测角方法与系统,解决现有方法在复杂电磁环境下目标角度测量精度低或测量结果错误的问题。
2、本发明的技术方案是:
3、第一方面,公开一种复杂电磁环境下四通道雷达单脉冲测角方法,包括:
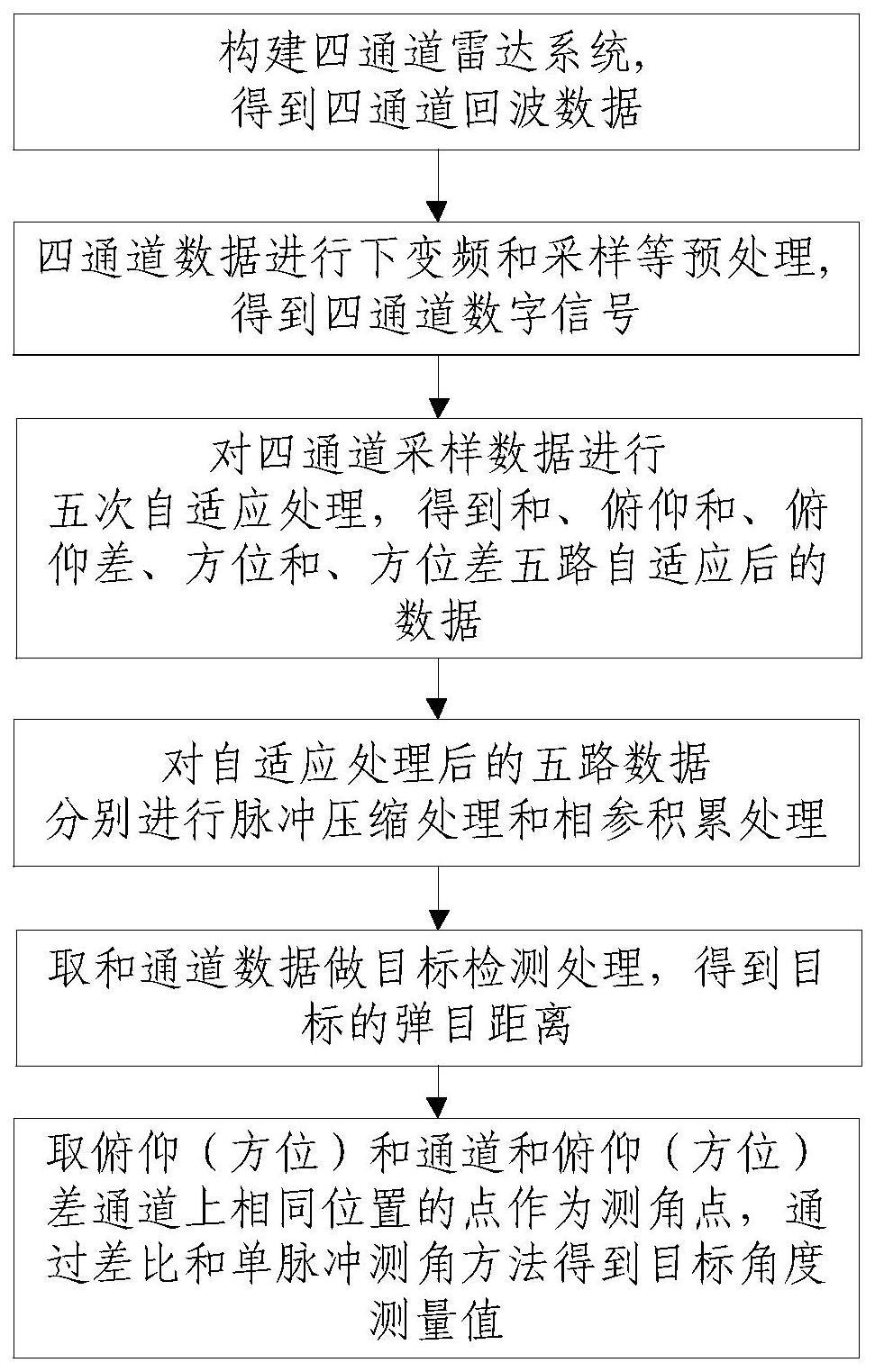
4、构建四通道雷达系统,得到四通道回波数据;
5、对所述四通道回波数据进行下变频和采样预处理,得到探测范围内的基带数字信号,作为信号自适应处理的输入;
6、对四通道预处理后数据进行五次自适应处理,得到和、俯仰和、俯仰差、方位和、方位差五路自适应后的数据;
7、对自适应处理后的五路数据分别进行脉冲压缩处理和相参积累处理;
8、取和通道数据做目标检测处理,得到目标的弹目距离;
9、取俯仰和通道、俯仰差通道上相同位置的点作为测角点,通过差比和单脉冲测角方法得到目标俯仰角度测量值;取方位和通道、方位差通道上相同位置的点作为测角点,通过差比和单脉冲测角方法得到目标方位角度测量值,输出测距测角结果。
10、在一个具体实施方式中,构建四通道雷达系统,得到四通道回波数据,具体包括:
11、构建四通道雷达系统,将雷达阵面均匀划分为四个子区a、b、c、d,接收信号时,四个子区接收的信号能量经过和差器的转换,在接收机的和通道得到四个子区的同相回波的矢量叠加结果(a+b+c+d),在俯仰差通道得到(a+b)-(c+d)的回波数据,在方位差通道得到(a+c)-(b+d)的回波数据,在对角差通道得到(a+d)-(b+c)的回波数据。
12、在一个具体实施方式中,对四通道预处理后数据进行五次自适应处理,得到和、俯仰和、俯仰差、方位和、方位差五路自适应后的数据;具体包括:
13、其中第一次自适应处理用到四通道的所有采样数据,得到自适应后的和通道数据,用于后续的目标检测和测距;第二次到第五次自适应处理分别用到四通道两两相互匹配的数据,分别得到自适应后的俯仰和通道、俯仰差通道、方位和通道以及方位差通道数据,用于后续目标的角度测量。
14、在一个具体实施方式中,自适应处理方法具体实现步骤如下:
15、首先从和通道中选取l个过幅度门限的距离单位对应的采样点,幅度门限由干噪比决定,计算所有采样点的均值作为噪声基底,取噪声基底的σ倍作为幅度门限,σ根据当前过门限的点的数量进行自适应调整,直到选取到符合数量要求的采样点;再取俯仰差通道、方位差通道和对角差通道中和和通道采样点中同距离单元上的点作为各自通道的采样点;
16、第一次自适应处理中将三个差通道作为辅助通道,抑制和通道中的干扰信号;
17、第二次到第五次自适应处理分别将和通道、方位差通道;俯仰差通道、对角差通道;和通道、俯仰差通道;方位差通道、对角差通道的采样数据作为自适应处理的输入,即先利用方位差通道作为辅助通道,抑制和通道中的方位向的干扰,利用对角差通道作为辅助通道,抑制俯仰差通道中的方位向的干扰;然后利用俯仰差通道作为辅助通道,抑制和通道中的俯仰向的干扰,再利用对角差通道作为辅助通道,抑制方位差通道中的俯仰向的干扰。
18、在一个具体实施方式中,取俯仰和通道、俯仰差通道上相同位置的点作为测角点,通过差比和单脉冲测角方法得到目标俯仰角度测量值;取方位和通道、方位差通道上相同位置的点作为测角点,通过差比和单脉冲测角方法得到目标方位角度测量值,输出测距测角结果,具体按如下方式获得:
19、
20、
21、其中,θp、θa分别为测量俯仰角偏差和测量方位角偏差,kp、ka分别为俯仰向和方位向s曲线斜率,apδ、apσ分别为俯仰差通道与俯仰和通道测量点的幅度,aaδ、aaσ分别为方位差通道与方位和通道测量点的幅度。
22、第二方面,本发明公开一种复杂电磁环境下四通道雷达单脉冲测角系统,包括:
23、构建单元,用于构建四通道雷达系统,得到四通道回波数据;
24、预处理单元,用于对所述四通道回波数据进行下变频和采样预处理,得到探测范围内的基带数字信号,作为信号自适应处理的输入;
25、自适应单元,用于对四通道预处理后数据进行五次自适应处理,得到和、俯仰和、俯仰差、方位和、方位差五路自适应后的数据;
26、处理单元,用于对自适应处理后的五路数据分别进行脉冲压缩处理和相参积累处理;
27、检测单元,用于取和通道数据做目标检测处理,得到目标的弹目距离;
28、测角单元,用于取俯仰和通道、俯仰差通道上相同位置的点作为测角点,通过差比和单脉冲测角方法得到目标俯仰角度测量值;取方位和通道、方位差通道上相同位置的点作为测角点,通过差比和单脉冲测角方法得到目标方位角度测量值,输出测距测角结果。
29、在一个具体实施方式中:构建四通道雷达系统,将雷达阵面均匀划分为四个子区a、b、c、d,接收信号时,四个子区接收的信号能量经过和差器的转换,在接收机的和通道得到四个子区的同相回波的矢量叠加结果(a+b+c+d),在俯仰差通道得到(a+b)-(c+d)的回波数据,在方位差通道得到(a+c)-(b+d)的回波数据,在对角差通道得到(a+d)-(b+c)的回波数据。
30、在一个具体实施方式中:其中第一次自适应处理用到四通道的所有采样数据,得到自适应后的和通道数据,用于后续的目标检测和测距;第二次到第五次自适应处理分别用到四通道两两相互匹配的数据,分别得到自适应后的俯仰和通道、俯仰差通道、方位和通道以及方位差通道数据,用于后续目标的角度测量。
31、第三方面,提供一种计算装置,包括至少一个处理器以及至少一个存储器,其中,所述存储器存储有计算机程序,所述处理器,用于读取存储器中的计算机程序,执行上述第一方面所述方法的任一步骤。
32、第四方面,提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令用于使计算机执行上述第一方面所述方法的任一步骤。
33、本发明的有益技术效果是:
34、本发明测量结果更接近目标,即相比直接测角方法,本发明公开的测角方法测量精度有很大提高,并且不会出现明显的测角错误。因此,本发明所提出的测角方法能有效解决现有方法在复杂电磁环境下目标角度测量精度低或测量结果错误的问题。
- 还没有人留言评论。精彩留言会获得点赞!