一种机载高精度光纤惯性测量装置及组合导航方法与流程
本发明涉及一种机载高精度光纤惯性测量装置及组合导航方法,特别涉及一种用于航天航空领域无人机惯性导航用的小型化、轻质化、高精度光纤惯性测量装置,属于惯性测量。
背景技术:
1、无人机作为一种迅猛发展的无人装备系统,在军用领域能够执行快速侦察、对地攻击与防御、导弹指引与负载等功能,在21世纪的今天扮演着越来越重要的角色,是一种依靠科技与信息进行迭代和完善的现代化武器。同时在民用领域中的作用也尤其突出,例如参与地质灾害中的抗灾救援、农作物检测与培育、地理测绘等用途。
2、作为无人机飞行控制系统的重要单机设备,惯性测量装置对飞行可靠性的保障以及飞行精度的影响意义是十分显著的。光纤惯性测量装置凭借其轻质化、小型化、低功耗、高精度、空间环境适应性等多方面的优势在军用以及民用无人机领域获得广泛应用。
3、光纤惯性测量装置是一种纯惯性测量装置,由光纤陀螺仪和加速度计组成的惯性测量单元为主要部分,通过输出三个正交轴向上敏感的角速度,线加速度,通过积分迭代算法,能够计算出运载体在不同时刻的地理坐标系下的速度信息,姿态信息,地理位置信息等重要信息指标。其主要特点表现在以下几个方面:(1)高精度:导航精度优于1海里/小时;(2)小型化:内部布局合理、紧凑,空间利用率高,体积小、功耗低。
4、现有技术中,光纤惯性测量装置同等精度下体积比较大,同体积的装置精度较低;现有技术中,以视觉导航系统解算的运载体的位姿信息作为量测信息对纯惯性导航信息进行修正时,视觉导航信息未完成闭环优化更新,作为观测信息精度较低,滤波修正后组合导航解算的导航信息精度相对不高,且现有技术在进行滤波融合时,多搭建两个子系统进行紧耦合或特征向量之间无关联的松耦合系统,前者算法复杂度较高,不能满足无人应用装备系统对于组合导航的实时性要求,后者无关联的特征向量未能在有效时间内提升导航定位精度。
技术实现思路
1、本发明的目的在于克服现有技术的上述不足,提供一种机载高精度光纤惯性测量装置及组合导航方法,惯性测量装置具有高精度、小型化、轻质化等特点;组合导航方法具有高精度、实时高效等特点。
2、本发明的目的是通过以下技术方案实现的:
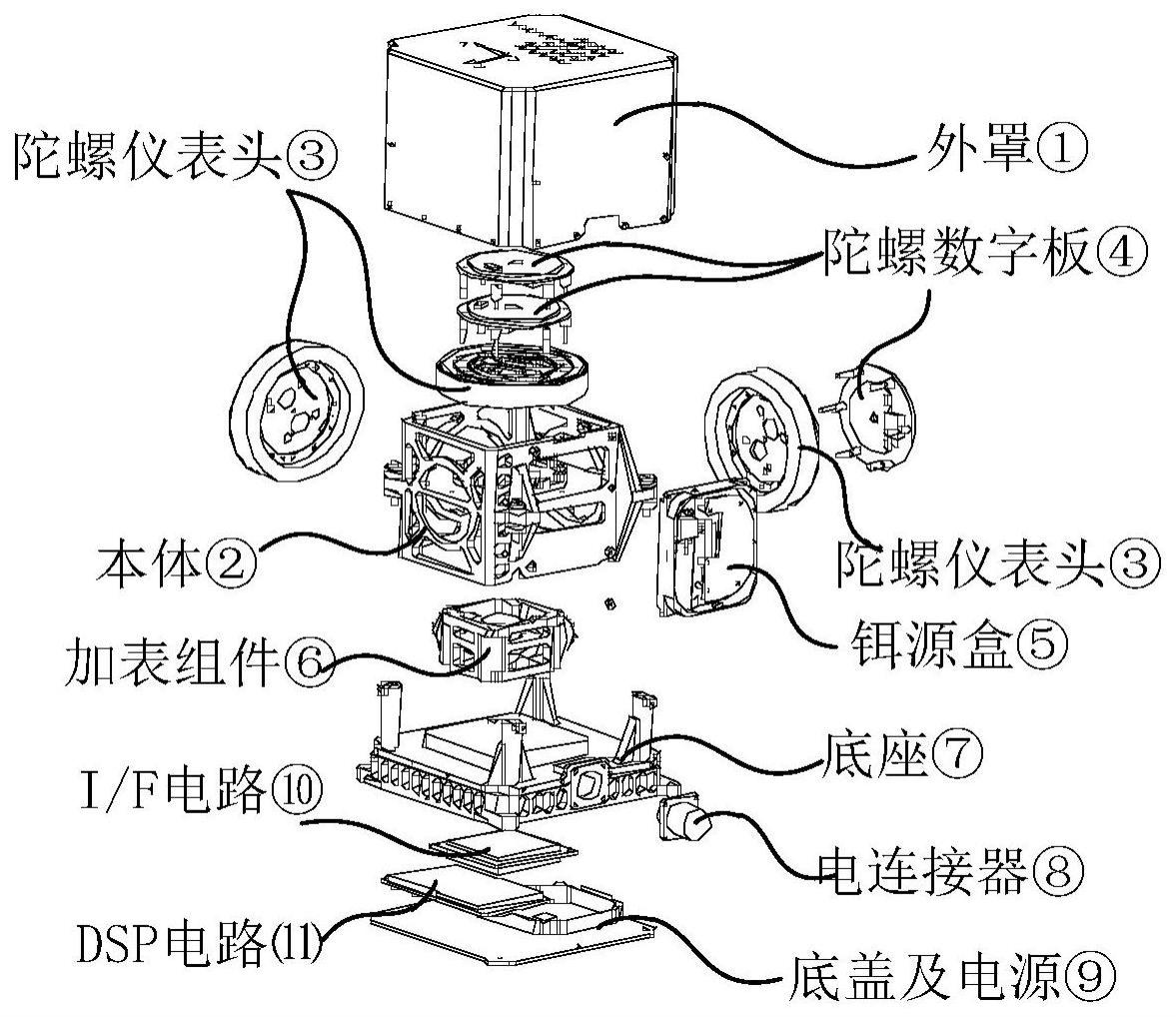
3、一种机载高精度光纤惯性测量装置,包括:外罩、陀螺本体、陀螺仪表头、陀螺数字板、光源、加表组件、底座、电连接器、底盖、i/f转换电路、dsp电路;
4、陀螺数字板嵌在陀螺仪表头上,三个相互正交的陀螺仪表头安装于陀螺本体的侧面及顶部;三个陀螺仪表头共用一个光源,加表组件位于陀螺本体的内侧,与陀螺本体相连,陀螺本体安装于底座之上,电连接器安装于底座的侧端,底盖作为测量装置的最底端位于底座下方,i/f转换电路和dsp电路按照从上至下的顺序安装于底座与底盖之间,底盖实现电路的封闭;外罩和底盖安装于底座之上,陀螺本体通过腰部四组减振器安装在外罩内部,外罩实现测量装置壳体的封闭。
5、进一步的,所述光源采用一个三轴共用的铒源盒实现。
6、进一步的,所述光纤惯性测量装置的外包络尺寸不大于150mm×140mm×127mm,重量不大于3.5kg,常温功耗不大于18w。
7、进一步的,i/f转换电路和dsp电路设置在远离陀螺仪本体的底座与底盖之间,当装置处于通电状态下,保证陀螺仪表头所处的环境温度。
8、进一步的,本发明还提出一种组合导航方法,包括步骤如下:
9、(1)dsp电路获取陀螺仪敏感的角速度信息,获取加表组件敏感的比力信息,并将获得的角速度信息以及比力信息进行一次积分得到光纤惯性测量装置的三轴姿态角和速度信息,对速度信息进行再次积分得到光纤惯性测量装置的位置信息,光纤惯性测量装置将积分得到的信息通过装置串口发送给机载计算机;光纤惯性测量装置的数据采样周期为1ms;
10、(2)将视觉定位系统与光纤惯性测量装置两个子导航系统安装于同一机载平台,两个子导航系统作为机载平台的组合导航系统的定位信息输入来源;
11、(3)将视觉定位系统的坐标系由世界坐标系转换到相机坐标系,计算其转换矩阵;
12、视觉导航系统的数据采样频率为30hz,在其进行位姿解算时涉及四个坐标系:世界坐标系、相机坐标系、图像坐标系、像素坐标系,视觉导航系统中解算的位姿是相机坐标系相对于世界坐标系,定义真实世界中的路标点在世界坐标系下的坐标为pw=[xw,yw,zw]t,在相机坐标系中的坐标表示为pc=[xc,yc,zc]t,两个位置之间的转换关系为:
13、
14、其中,表示由世界坐标系变换到相机坐标系的旋转矩阵,表示旋转后的世界坐标系的原点到相机坐标系的原点的平移长度;
15、(4)将视觉导航系统的坐标系由相机坐标系转换到图像坐标系,计算其转换矩阵;
16、
17、其中:的物理含义为相机的外参矩阵;
18、像素点在相机坐标系下的坐标与在图像坐标系下的坐标变换关系如下:
19、
20、f的物理含义为相机的焦距,且有fx=fy=f;
21、
22、(5)计算视觉导航系统中相机坐标系-图像坐标系-像素坐标系的转换矩阵;
23、
24、m的物理含义为相机的内参矩阵,相机的内参矩阵以及外参矩阵可以通过标定获得;cx和cy分别为一个像素点在x轴和y轴的单位长度,ux和vy代表像素点在像素坐标系上的横纵坐标;
25、确定p点在全局参考系下的坐标pw=[xw,yw,zw]t与其在像素坐标系下的坐标puv=[u,v]t之间的变换关系:
26、
27、(6)建立视觉导航系统的观测方程,为计算像素点在世界坐标系下的三维坐标p提供数学平台;
28、视觉导航系统的观测方程为:
29、z=h(x,y)
30、其中:z表示特征点在投影平面上的观测,x表示解算出的相机位姿,用李代数ξ代表,y表示路标点的三维坐标估计;
31、h(ξ,p)代表重投影之后得到的像素坐标,因此误差函数的表达式为:
32、e=z-h(ξ,p)
33、对所有特征点的实际像素坐标以及相机状态ξ进行标号,设zij为第i帧相机以状态ξi、对路标pj产生的观测,代价函数代表进行最小化的误差函数,表达式为:
34、
35、不断迭代,使代价函数最小化,即完成了最优估计,求出此时的ξ和p,即计算出机载平台的状态以及路标点在世界坐标系下的三维坐标;
36、(7)将视觉定位系统计算得到的机载平台的位置信息ξ同样发送给机载计算机,为组合导航系统多源融合提供输入信息;
37、(8)计算地理坐标系与世界坐标系之间的初始变换矩阵;
38、惯性坐标系解算出经纬高、俯仰滚转航向角、东北天速度是相对于地理坐标系而言的,两个坐标系中的位姿信息在进行融合时,首先要进行两个坐标系的统一和标定,设地理坐标系为n系,即东-北-天坐标系,世界坐标系为w系,两个坐标系之间的变换矩阵为两个坐标系之间的变换矩阵在飞机装机时通过标定计算得到,利用标定计算得到的初始变换矩阵将两个子导航系统计算得到的位置信息投影到同一坐标系中;
39、(9)建立组合导航系统的状态方程;
40、组合导航系统状态向量为:
41、
42、其中:表示单位四元数,表征运载体从惯性坐标系到世界坐标系的旋转,bg表示陀螺仪的零偏,表示运载体在全局世界坐标系下的速度ba表示陀螺仪的零偏,表示运载体在全局世界坐标系下的具体位置,表示拍摄第n帧图像时,相机在全局世界坐标系中的位置,表示拍摄第n帧图像时,相机相对全局世界坐标系中的旋转;
43、(10)建立组合导航系统的观测方程;
44、(11)完成了组合导航系统的状态更新与观测更新,实现滤波,完成导航定位。
45、本发明与现有技术相比具有如下优点:
46、(1)本发明采用分舱的设计方案,使所述光纤惯性测量装置的外包络尺寸不大于150mm×140mm×127mm,重量不大于3.5kg,常温功耗不大于18w,在保证光纤惯性测量装置实现高精度测量的前提下,实现轻质化和小型化的设计。
47、(2)本发明陀螺仪电路板分布放置、i/f转换电路板放在底座上,在保证轻质化、小型化的特点上,在装置通电状态下,改善了陀螺仪所处的环境温度,对于提高陀螺精度具有很大意义。
48、(3)本发明视觉导航系统作为组合导航系统中的子系统,不依赖于外界因素,可全地理环境、全天候地实时进行导航解算,在卫星接收机信息失锁时,作为量测信息对纯惯性导航解算的位置信息进行修正,组合导航算法可以利用视觉导航系统估计的位置信息对纯惯性导航长时间积分解算而导致误差累积的位置信息进行修正,从而修正了三轴姿态角,导航精度实现了提升。
- 还没有人留言评论。精彩留言会获得点赞!