用于车辆距离测量的方法、装置、电子设备和介质与流程
本公开一般地涉及自动驾驶,特别地涉及用于对象检测的方法、相应设备和相应计算机可读存储介质。
背景技术:
1、目前的行进间的车辆距离测试方法有依靠光学视觉摄像头的测距、红外测距、激光测距以及超声测距。在这些方法中,光学视觉摄像头的测距依赖于外部环境和光照条件,且车与被测车辆产生偏差,从而造成测量的不准确。红外测距利用红外线光管发出红外光,光敏接收管接收前方物体反射光。根据发射光的强弱可以判断物体的距离,但是测量距离较近,方向较差,无法应用于行车测试所需的垂直距离和横向距离的测量。激光测距的台架制作以及测试成本和难度较大且依赖于光学环境。超声测距的精度较低,且成本较高。
技术实现思路
1、根据本公开的示例实施例,提供了一种用于车辆距离测量的方案,以至少部分地解决现有技术中存在的问题。
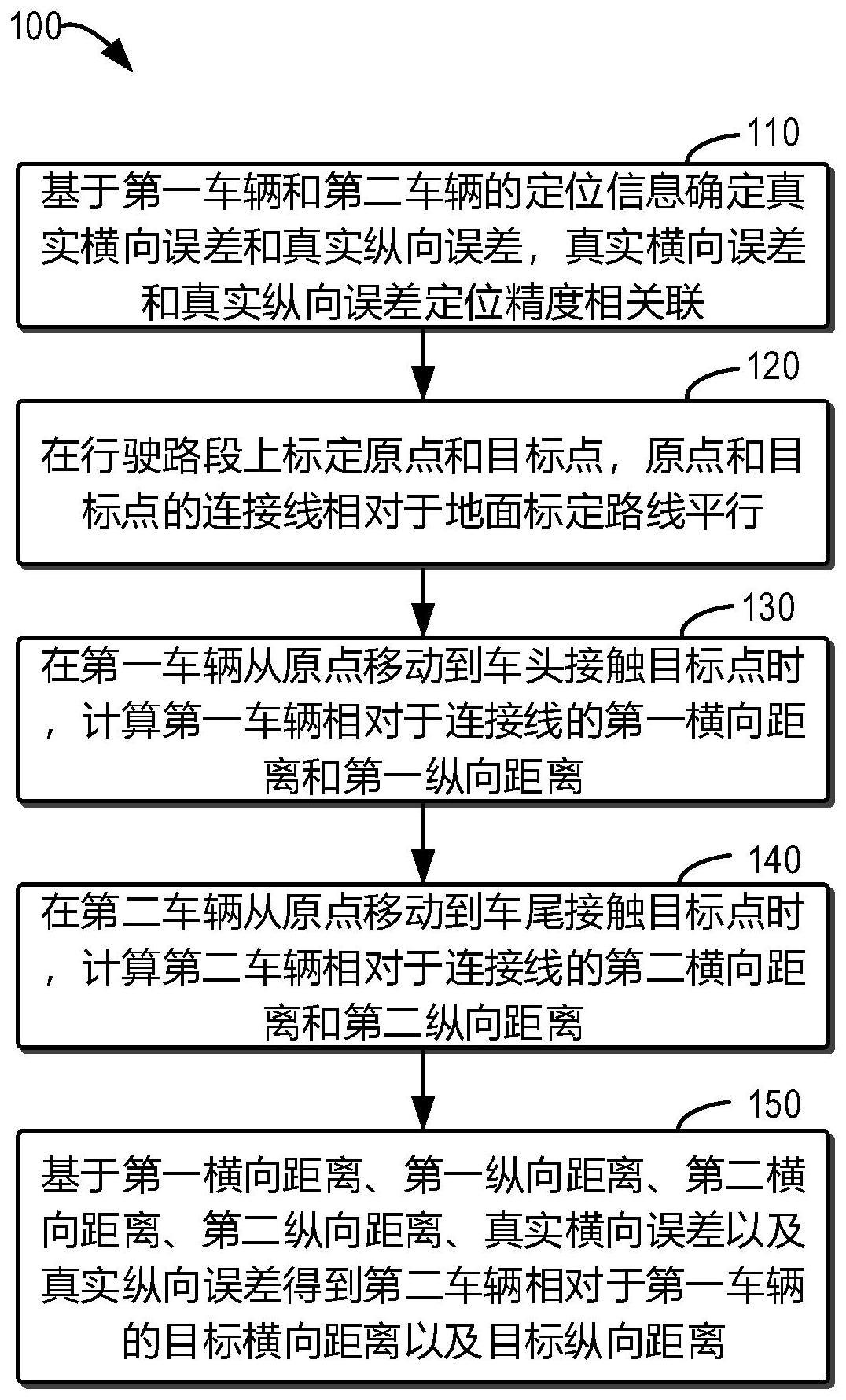
2、在本公开的第一方面中,提供了一种用于车辆距离测量的方法。该方法包括:基于第一车辆和第二车辆的定位信息确定真实横向误差和真实纵向误差,所述真实横向误差和所述真实纵向误差与所述第一车辆和所述第二车辆之间的定位精度相关联;在行驶路段上标定原点和目标点,所述原点和所述目标点的连接线相对于地面标定路线平行;在所述第一车辆从所述原点移动到车头接触所述目标点时,计算所述第一车辆相对于所述连接线的第一横向距离和第一纵向距离;在所述第二车辆从所述原点移动到车尾接触所述目标点时,计算所述第二车辆相对于所述连接线的第二横向距离和第二纵向距离;以及基于所述第一横向距离、所述第一纵向距离、所述第二横向距离、所述第二纵向距离、所述真实横向误差以及所述真实纵向误差,得到所述第二车辆相对于所述第一车辆的目标横向距离以及目标纵向距离。
3、在一些实施例中,基于第一车辆和第二车辆的定位信息确定真实横向误差和真实纵向误差可以包括:确定所述第一车辆和所述第二车辆首尾相接时形成的接触点;确定第一定位装置到所述接触点的第三纵向距离和第三横向距离,所述第一定位装置设置在所述第一车辆上;确定第二定位装置到所述接触点的第四纵向距离和第四横向距离,所述第二定位装置设置在所述第二车辆上;以及基于所述第三纵向距离、所述第三横向距离、所述第四纵向距离以及所述第四横向距离,得到所述真实横向误差和所述真实纵向误差。
4、在一些实施例中,基于第一车辆和第二车辆的定位信息确定真实横向误差和真实纵向误差可以包括:确定第三方靶车的尺寸参数,其中所述第三方靶车静止设置在所述第一车辆和所述第二车辆之间;以及利用设置在所述第一车辆上的第一定位装置、设置在所述第二车辆上的第二定位装置以及所述尺寸参数,得到所述真实横向误差和所述真实纵向误差。
5、在一些实施例中,在行驶路段上标定原点和目标点,所述原点和所述目标点的连接线相对于地面标定路线平行可以包括:以所述原点作为坐标系原点、所述目标点作为y轴正方向、y轴正轴顺时针旋转90度的方向为x轴正方向,以右手定则建立应用坐标系;以及在所述应用坐标系内标定所述原点和所述目标点。
6、在一些实施例中,确定所述第一车辆和所述第二车辆首尾相接时形成的接触点可以包括:保持所述第一车辆和所述第二车辆呈直线状态,并且平行于所述地面标定路线。
7、在一些实施例中,在所述第一车辆从所述原点移动到车头接触所述目标点时,计算所述第一车辆相对于所述连接线的第一横向距离和第一纵向距离可以包括:基于坐标系点到点距离公式,得到所述第一车辆从所述原点到所述目标点的第一距离;基于点到直线最短距离公式,得到所述第一横向距离;以及基于所述第一距离和所述第一横向距离,得到所述第一纵向距离。
8、在一些实施例中,在所述第二车辆从所述原点移动到车尾接触所述目标点时,计算所述第二车辆相对于所述连接线的第二横向距离和第二纵向距离可以包括:基于坐标系点到点距离公式,得到所述第二车辆从所述原点到所述目标点的第二距离;基于点到直线最短距离公式,得到所述第二横向距离;以及基于所述第二距离和所述第二横向距离,得到所述第二纵向距离。
9、在本公开的第二方面中,提供了一种用于对象检测的装置。该装置包括:误差确定模块,被配置为基于第一车辆和第二车辆的定位信息确定真实横向误差和真实纵向误差,所述真实横向误差和所述真实纵向误差与所述第一车辆和所述第二车辆之间的定位精度相关联;点标定模块,被配置为在行驶路段上标定原点和目标点,所述原点和所述目标点的连接线相对于地面标定路线平行;第一横纵向距离计算模块,被配置为在所述第一车辆从所述原点移动到车头接触所述目标点时,计算所述第一车辆相对于所述连接线的第一横向距离和第一纵向距离;第二横纵向距离计算模块,被配置为在所述第二车辆从所述原点移动到车尾接触所述目标点时,计算所述第二车辆相对于所述连接线的第二横向距离和第二纵向距离;以及目标距离确定模块,被配置为基于所述第一横向距离、所述第一纵向距离、所述第二横向距离、所述第二纵向距离、所述真实横向误差以及所述真实纵向误差,得到所述第二车辆相对于所述第一车辆的目标横向距离以及目标纵向距离。
10、在一些实施例中,所述误差确定模块还可以被配置为确定所述第一车辆和所述第二车辆首尾相接时形成的接触点;确定第一定位装置到所述接触点的第三纵向距离和第三横向距离,所述第一定位装置设置在所述第一车辆上;确定第二定位装置到所述接触点的第四纵向距离和第四横向距离,所述第二定位装置设置在所述第二车辆上;以及基于所述第三纵向距离、所述第三横向距离、所述第四纵向距离以及所述第四横向距离,得到所述真实横向误差和所述真实纵向误差。
11、在一些实施例中,所述误差确定模块还可以被配置为确定第三方靶车的尺寸参数,其中所述第三方靶车静止设置在所述第一车辆和所述第二车辆之间;以及利用设置在所述第一车辆上的第一定位装置、设置在所述第二车辆上的第二定位装置以及所述尺寸参数,得到所述真实横向误差和所述真实纵向误差。
12、在一些实施例中,所述点标定模块还可以被配置为以所述原点作为坐标系原点、所述目标点作为y轴正方向、y轴正轴顺时针旋转90度的方向为x轴正方向,以右手定则建立应用坐标系;以及在所述应用坐标系内标定所述原点和所述目标点。
13、在一些实施例中,所述误差确定模块还可以被配置为保持所述第一车辆和所述第二车辆呈直线状态,并且平行于所述地面标定路线。
14、在一些实施例中,第一横纵向距离计算模块还可以被配置为基于坐标系点到点距离公式,得到所述第一车辆从所述原点到所述目标点的第一距离;基于点到直线最短距离公式,得到所述第一横向距离;以及基于所述第一距离和所述第一横向距离,得到所述第一纵向距离。
15、在一些实施例中,第二横纵向距离计算模块还可以被配置为基于坐标系点到点距离公式,得到所述第二车辆从所述原点到所述目标点的第二距离;基于点到直线最短距离公式,得到所述第二横向距离;以及基于所述第二距离和所述第二横向距离,得到所述第二纵向距离。
16、在本公开的第三方面中,提供了一种电子设备。该设备包括:一个或多个处理器;以及存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现根据本公开第一方面的方法。
17、在本公开的第四方面中,提供了一种计算机可读存储介质。该介质上存储有计算机程序,所述程序被处理器执行时实现根据本公开第一方面的方法。
18、在本公开的第五方面中,提供了一种计算机程序产品。该产品包括计算机程序/指令,计算机程序/指令被处理器执行时实现根据本公开第一方面的方法。
19、应当理解,
技术实现要素:
部分中所描述的内容并非旨在限定本公开的实施例的关键或重要特征,亦非用于限制本公开的范围。本公开的其它特征将通过以下的描述变得容易理解。
- 还没有人留言评论。精彩留言会获得点赞!