炉前铁样全自动处理系统及处理方法与流程
炉前铁样全自动处理系统及处理方法
1.技术领域:本发明涉及一种炉前铁样全自动处理系统及处理方法。
2.
背景技术:
高炉铁水测温取样是铁水生产过程中必不可少的工序,对铁水质量监控和管理有着至关重要的作用。其中铁样的制取和处理过程对铁水质量检测的准确性和稳定性十分重要。
3.目前高炉铁水取样主要有三种方式。一种是人工在铁水沟处借助长杆进行取样;一种采用半自动机械夹取取样杆进行取样。这两种方式取样后由人工将取样杆含有铁样一端通过敲击等方式击碎取样杆,人工再使用夹子等工具将铁样放入水槽中冷却。第三种方式为机器人自动完成取样作业,之后由破碎机构通过锯切或敲击等方式将取样杆端部破坏,再由人工取出铁样进行冷却。冷却后铁样由人工放入风送罐中,装入风送机送至检验室。
4.以上三种方式,铁样的筛选、冷却和风送作业均由人工完成,并未实现全流程的自动化作业,高炉出铁现场环境差、易发生危险,并且此项作业为重复劳动,劳动价值低。
5.
技术实现要素:
本发明的目的是提供一种炉前铁样全自动处理系统及处理方法,实现高炉铁水测温、取样至铁样风送至检验室的全流程自动化作业。
6.上述的目的通过以下的技术方案实现:一种炉前铁样全自动处理系统,包括:放置在保温工作间内的炉前铁水自动测温取样移动机器人、取样杆及测温杆储存仓、六轴工业机器人、铁样筛分机、打标机、风送机、铁样夹具;所述的炉前铁水自动测温取样移动机器人包括agv小车和六轴机器人,可从保温工作间自动导航移动至铁口完成测温取样作业;所述的铁样筛分机将取样杆破碎后残渣和铁样的混合物进行逐级筛分,最终只将铁样筛出;所述的打标机采用激光对铁样表面进行清理并标记相应信息符号;所述的风送机包括风送机本体、风送罐及相应管道,将含有铁样的风送罐通过正压或负压方式输送至检验室;所述的铁样夹具安装在所述的保温工作间内机器人末端。
7.进一步地,所述的铁样夹具包含视觉识别相机、机器人连接板、夹紧气缸、夹紧架,所述的视觉识别相机与所述的夹紧气缸固定在机器人连接板上,所述的夹紧架安装在所述的夹紧气缸两侧,所述的夹紧架随所述的夹紧气缸运动可夹取铁样和碎渣接料斗。
8.进一步地,所述的agv小车上安装有破样机构,将取样杆端部夹碎,碎渣落入接料斗,随agv小车返回保温工作间。
9.进一步地,所述的取样杆和测温杆储存仓内存储有取样杆、测温杆。
10.进一步地,所述的打标机采用激光对铁样表面进行清理并标记相应信息符号。
11.进一步地,所述的保温工作间内还具有agv小车自动充电装置、调温通风装置、控制柜,进一步地,所述的保温工作间门口装有安全检测传感器。
12.一种利用上述的炉前铁样全自动处理系统的处理方法,该方法包括:(1)炉前铁水自动测温取样移动机器人完成自动测温取样作业返回保温工作间后将相关信号反馈至控制系统;(2)保温工作间内六轴工业机器人将铁样夹具移动至碎渣接料斗附近;(3)视觉识别相机进行定位,引导六轴工业机器人夹取接料斗;(4)六轴工业机器人将接料斗中碎渣倒入铁样筛分机;(5)六轴工业机器人将空的接料斗放回至原位;(6)铁样筛分机对铁样和碎渣进行冷却、筛分,只留铁样;(7)六轴工业机器人将铁样夹具移动至铁样筛分机出料口附近;(8)视觉识别相机对铁样拍照识别,检测表面质量并进行定位;(9)铁样夹具夹取铁样放至打标机工位;(10)打标机通过激光清理铁样表面并打印相应信息符号;(11)铁样夹具再次夹取铁样,放入风送罐;(12)风送机自动合盖并将风送罐输送至检验室。
13.本发明的有益效果:本发明与炉前铁水自动测温取样移动机器人结合,实现实现测温取样、破样、打标、风送全流程自动化作业,可与中控系统实时信息交互;实现了高炉铁水测温取样至风送的全流程自动化作业;可取消此环节人工作业,避免人工对铁样质量的影响,检验结果更加准确。增加打标环节,直接在铁样上标记生产信息,取样信息与中控系统实时通讯,信息自动记录核对,消除人工参与可能造成的疏漏。
14.本发明减轻工人劳动强度和频率;避免了人工测温取样作业过程可能的安全危害;测温取样至风送流程避免了人工处理,可增加最终化验的准确性和稳定性;与炉前铁水自动测温取样移动机器人结合,可将工作间置于远离高炉和出铁口的位置,不占用出铁口附件空间,布置更加合理和环保。
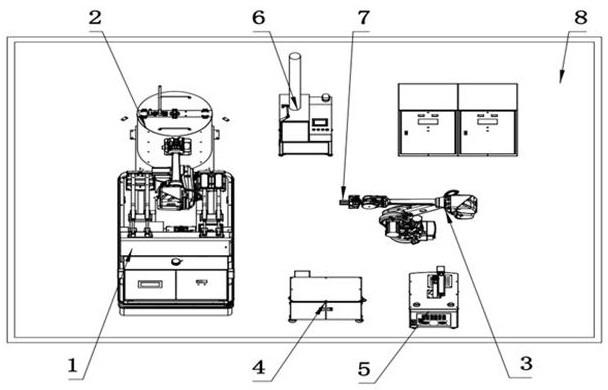
15.附图说明:附图1是本发明的结构示意图。
16.附图2是本发明铁样夹具的结构示意图。
17.附图中:1:炉前铁水自动测温取样移动机器人;2:取样杆及测温杆储存仓;3:六轴工业机器人;4:铁样筛分机;5:打标机;6:风送机;7:铁样夹具;8:保温工作间;7-1:视觉识别相机;7-2:机器人连接板;7-3:夹紧气缸;7-4:夹紧架。
18.具体实施方式:为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
19.实施例1:
本发明提供了一种炉前铁样全自动处理系统,组成包括:炉前铁水自动测温取样移动机器人1、取样杆及测温杆储存仓2、六轴工业机器人3、铁样筛分机4、打标机5、风送机6、铁样夹具7和保温工作间8。
20.所述炉前铁水自动测温取样移动机器人1包括agv小车和六轴机器人可从保温工作间自动导航移动至铁口完成测温取样作业。可自动安装新测温杆和取样杆,可自动进行充电。与其他设备和控制系统采用无线通讯。
21.agv小车上安装有破样机构,可将取样杆端部夹碎,碎渣落入接料斗,随agv小车返回保温工作间。
22.所述取样杆和测温杆储存仓2可缓存一定数量取样杆和测温杆并自动送出,以便炉前铁水自动测温取样移动机器人抓取。
23.所述铁样筛分机4具有筛分和冷却、残渣收集功能,可将铁样进行冷却。可将取样杆破碎后残渣和铁样的混合物进行逐级筛分,最终只将铁样筛出。取样杆残渣落入冷却槽中。
24.所述打标机5采用激光对铁样表面进行清理并标记相应信息符号。
25.所述风送机6包含风送机本体和风送罐机及相应管道。可将含有铁样的风送罐通过正压或负压方式输送至检验室。
26.所述铁样夹具7安装在保温工作间内机器人末端,包含视觉识别相机7-1、机器人连接板7-2,夹紧气缸7-3、夹紧架7-4等。视觉识别相机与夹紧气缸固定在机器人连接板上,夹紧架安装在夹紧气缸两侧。夹紧架随夹紧气缸运动可夹取铁样和碎渣接料斗。
27.所述保温工作间8内还具有agv小车自动充电装置、调温通风装置、控制柜等。保温工作间门口装有安全检测传感器,工作期间人员进入时进行声光报警。
28.保温工作间8内,以六轴工业机器人3为中心,炉前铁水自动测温取样移动机器人返回工作间后位于六轴工业机器人3前方,铁样筛分机4、打标机5、风送机6、控制柜分别布置在六轴工业机器人3两侧。
29.实施例2:根据实施例1所述的炉前铁样全自动处理系统,其处理流程方法包括如下步骤:(1)炉前铁水自动测温取样移动机器人1完成自动测温取样作业返回保温工作间8后将相关信号反馈至控制系统;(2)保温工作间8内六轴工业机器人3将铁样夹具7移动至碎渣接料斗附近;(3)视觉识别相机7-1进行定位,引导六轴工业机器人3夹取接料斗;(4)六轴工业机器人3将接料斗中碎渣倒入铁样筛分机4;(5)六轴工业机器人3将空的接料斗放回至原位;(6)铁样筛分机4对铁样和碎渣进行冷却、筛分,只留铁样;(7)六轴工业机器人3将铁样夹具7移动至铁样筛分机出料口附近;(8)视觉识别相机7-1对铁样拍照识别,检测表面质量并进行定位;(9)铁样夹具7夹取铁样放至打标机工位;(10)打标机5通过激光清理铁样表面并打印相应信息符号;(11)铁样夹具7再次夹取铁样,放入风送罐;(12)风送机6自动合盖并将风送罐输送至检验室。
30.本发明实现高炉铁水测温、取样至铁样风送至检验室的全流程自动化作业。此发明可取消此环节人工作业,避免人工对铁样质量的影响,检验结果更加准确。增加打标环节,直接在铁样上标记生产信息,取样信息与中控系统实时通讯,信息自动记录核对,消除人工参与可能造成的疏漏。自动完成铁样的冷却,并与碎渣分离;实现铁样的自动打标,便于检验和记录。
31.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1