基于色散傅里叶变换的双光学频率梳飞行时间法测距系统
本发明属于大范围、高精度绝对距离测量领域和双光学频率梳应用领域,具体提供一种基于色散傅里叶变换的双光学频率梳飞行时间法测距系统。
背景技术:
1、光学频率梳是指由一系列均匀间隔且具有稳定相位关系的离散频率分量组成的光谱,根据傅里叶变换,其能够提供稳定间隔的时域脉冲,是天然的时频基准和高度稳定的脉冲激射源。近年来由于自动驾驶汽车、周边安防检测、智能机器人等技术的蓬勃发展,对高性能测距系统的需求日益旺盛;采用光学频率梳作为光源的激光雷达成为热点研究方向,其中一个重要的方法就是双光学频率梳飞行时间法测距。基于双光学频率梳飞行时间法的测距系统通常采用两台重复频率具有微小差异的光学频率梳作为光源,由于二者周期具有微小差别,因此每经过一个脉冲周期两脉冲产生一定的时间滑移,当时间滑移量积累到一整个脉冲周期时两脉冲将再次对准,形成一个增强信号,也就是说本振光梳对信号光梳进行了异步采样,将原本很小的脉冲时延量在时域上进行展宽放大,从而极大的降低了对探测器带宽的依赖。
2、双光学频率梳飞行时间法充分结合了光频梳脉冲超快和光谱分辨率超高的优势,在测距范围、测距速度、测距精度方面都较传统测距方案有了较大提升;然而,这种异步采样的双光学频率梳飞行时间法测距系统目前也存在一些问题:首先,当被测距离接近于双光学频率梳飞行时间法对应的非模糊测距范围的整数倍时,参考和目标干涉信号会在时域重叠,导致无法测量,干涉信号时域长度对应的距离称为测距“盲区”;其次,目前主流的距离求解方法是通过对干涉图样进行希尔伯特变换并取模提取干涉信号包络,再对包络进行高斯拟合,计算参考和目标信号包络顶点的时延,从而计算该飞行时间所对应的距离,由于光频梳的脉冲序列在时域是离散分布的,因此增强峰的位置也是离散分布的,采用脉冲包络计算得到的脉冲时刻位置误差较大,无法得知三路脉冲的实际位置关系,导致测距精度较低(一般为μm量级);此外,由于包络提取方案需系统满足奈奎斯特采样定律,即要求两光学频率梳的重复频率差不能太大,这严重限制了飞行时间法在对测距速度要求较高的场景下的应用。
3、综上所述,开发兼具大测距范围、高精度、小空间分辨率的激光测距系统至关重要。
技术实现思路
1、本发明的目的在于针对传统飞行时间法测距中的测距“盲区”问题及脉冲包络时延计算误差较大的问题,提供一种基于色散傅里叶变换的双光学频率梳飞行时间法测距系统,能够完全消除传统飞行时间测距系统中的测量“盲区”,并在保持超长探测距离和超快测量速度的同时,实现高精度无级连续测量。
2、为实现上述目的,本发明采用的技术方案为:
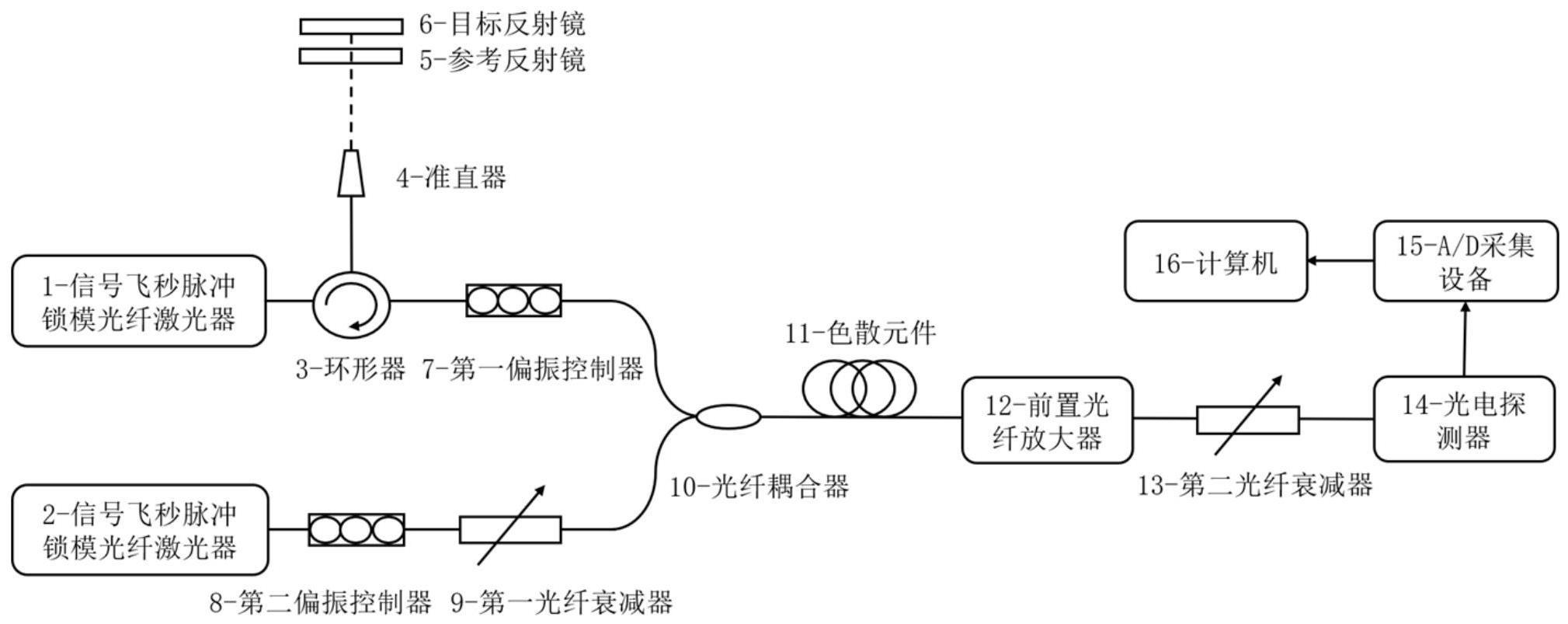
3、一种基于色散傅里叶变换的双光学频率梳飞行时间法测距系统,包括:信号飞秒脉冲锁模光纤激光器1、本振飞秒脉冲锁模光纤激光器2、环形器3、准直器4、参考反射镜5、目标反射镜6、第一偏振控制器7、第二偏振控制器8、第一光纤衰减器9、光纤耦合器10、色散元件11、前置光纤放大器12、第二光纤衰减器13、光电探测器14、a/d采集设备15、计算机16;其特征在于:
4、所述信号飞秒脉冲锁模激光器与本振飞秒脉冲锁模激光器分别发出信号飞秒脉冲序列与本振飞秒脉冲序列,信号飞秒脉冲序列具有第一重复频率,本振飞秒脉冲序列具有第二重复频率;信号飞秒脉冲序列通过环形器的第一端口注入准直器,经过准直后的空间光发射到参考反射镜与目标反射镜上、得到包含参考回波脉冲序列与目标回波脉冲序列的回波信号,回波信号通过环形器第三端口注入第一偏振控制器;同时,本振飞秒脉冲序列依次经过第二偏振控制器、第一光纤衰减器后与回波信号通过光纤耦合器耦合到一起;光纤耦合器的输出信号(包含三路脉冲序列:本振飞秒脉冲序列、参考回波脉冲序列与目标回波脉冲序列)首先通过色散元件进行色散傅里叶变换,然后通过前置光纤放大器进行光信号放大,并通过第二光纤衰减器调节光功率,最后利用光电探测器对输出干涉信号进行探测,得到的模拟电信号通过a/d采集设备转换为数字信号,再传输至计算机进行数据处理。
5、进一步的,所述信号飞秒脉冲锁模光纤激光器与本振飞秒脉冲锁模光纤激光器采用相同类型器件,采用被动锁模光纤激光器,具体为基于真实可饱和吸收体的锁模激光器、基于非线性放大环形镜(nalm)的锁模激光器、基于非线性偏振旋转效应(npr)的锁模激光器或基于非线性多模干涉(nl-mmi)的锁模激光器。
6、进一步的,信号飞秒脉冲序列的第一重复频率fr1(对应信号脉冲序列周期t1)与本振飞秒脉冲序列的第二重复频率fr2(对应信号脉冲序列周期t2)既不能太大、也不能太小,太小则系统无模糊范围小,太大则会降低测距速度,典型值为1~100mhz;同时,两飞秒脉冲序列的重复周期差δt:δt=t2-t1应小于色散傅里叶变换中可识别的最大脉冲时延量(根据所采用的色散元件色散量、光电探测器带宽、a/d采集设备带宽和采样率确定)的两倍。
7、进一步的,所述色散元件包括但不限于标准单模光纤、色散补偿光纤、啁啾布拉格光栅等具有大群速度色散参量的光纤元件,色散元件的总色散量应使得本振飞秒脉冲序列、参考回波脉冲序列与目标回波脉冲序列在时域进行充分展宽,同时展宽值不超过脉冲序列的自身周期。
8、进一步的,所述光电探测器的带宽应当足够大,典型值为>10g。
9、进一步的,所述a/d采集设备的带宽和采样率应当足够大,典型值为>16g和>40gs/s,且每次采集时间长度不小于1/|fr1-fr2|。
10、进一步的,所述计算机中数据处理即为目标回波脉冲与参考回波脉冲之间的飞行时间和距离的计算过程,具体为:
11、双光学频率梳产生连续两个增强的时间长度称为一个更新周期tupdate:tupdate=1/|fr1-fr2|,通过a/d采集设备采集得到一个更新周期的时域波形(干涉图),其中包含参考增强峰和目标增强峰信息;记参考增强峰中包含的两个连续的增强峰p1和增强峰p2,增强峰的中心时刻对应为tp1和tp2;记目标增强峰中包含的两个连续的增强峰p3和增强峰p4,增强峰的中心时刻对应为tp3和tp4;如图2所示;
12、首先,计算增强峰p1和增强峰p4之间的本振脉冲周期数n:表示向下取整;
13、然后,分别对增强峰p1和增强峰p4的时间信号进行傅里叶变换,计算得到各自的干涉条纹周期,记为tp1和tp4;根据脉冲时延量与干涉条纹周期的对应关系(如图3所示)可以计算得到增强峰p1中参考回波脉冲与本振脉冲的时延量τp1:τp1=d/tp1,增强峰p4中目标回波脉冲与本振脉冲的时延量τp4:τp4=d/tp4,d为色散元件对脉冲施加的总色散量;
14、最后,计算得到参考回波脉冲与目标回波脉冲的飞行时间ttof:ttof=n(t2-t1)-τp1-τp4,再根据距离=时间×速度,计算得到对应的距离l:l=c·ttof/2。
15、基于上述技术方案,本发明的有益效果在于:
16、本发明提供一种基于色散傅里叶变换的双光学频率梳飞行时间法测距系统,在传统双光学频率梳系统中引入色散傅里叶变换技术,摒弃了传统包络拟合的统计学解调技术,由于系统通过干涉信息来解调飞行时间,即使参考脉冲和测距脉冲相隔很近也可以被精确解调,因此,传统双光学频率梳测距系统中的测距“盲区”将被完全消除。同时,由于采用色散元件将脉冲时域走离关系放大,直接通过干涉条纹信息获得三路脉冲精确位置关系,从而提高了测距精度,系统的理论测距精度极限仅受光源频率随时间的漂移引起的脉冲抖动的影响。并且,该系统无需满足奈奎斯特采样定律,双光学频率梳的重频差可以提升至mhz量级,大大提高了测距速度。综上,本发明的基于色散傅里叶变换的双光学频率梳飞行时间法测距系统可以兼具大测量范围、高测量精度和高测量速度。
- 还没有人留言评论。精彩留言会获得点赞!