一种拖挂车与牵引车的角度检测装置的制作方法
1.本实用新型涉及汽车辅助驾驶技术领域,具体为一种拖挂车与牵引车的角度检测装置。
背景技术:
2.随着车辆数字技术发展,全景系统在辅助车辆驾驶或自动车辆驾驶越来越重要。家用车与小型货车的全景系统已经存在成熟的产品,而拖挂车与牵引车由于车况不同,现有能够适用的全景系统不成熟,存在技术缺陷,如车头与拖挂转向角度检测精度与图像拼接问题。
3.目前,市场上的全景影像已广泛应用于各种车辆,但对于类似拖挂车这种车型来说,车头和车身在转弯的时候会存在角度,这就导致车载摄像头捕捉到的影像拼接后会错乱,存在严重问题。目前市面上的全景影像系统通过增加摄像头的广角来弥补误差,不仅增加成本,而且影像拼接效果不佳。
技术实现要素:
4.本实用新型的目的在于提供一种可准确测量拖挂车与牵引车角度的拖挂车与牵引车的角度检测装置。
5.本实用新型实施例中,提供了一种拖挂车与牵引车的角度检测装置,其包括圆弧形轨道、设置于所述圆弧形轨道中且可沿所述圆弧形轨道运动的磁性小车、设置于所述圆弧形轨道一端的第一拉绳传感器,所述第一拉绳传感器的拉绳与所述磁性小车相连接,用于检测所述磁性小车在所述圆弧形轨道上的行程。
6.本实用新型实施例中,所述圆弧形轨道包括圆弧形凹槽和设置于所述圆弧形凹槽上的盖板,所述盖板用于防止所述磁性小车脱离轨道。
7.本实用新型实施例中,所述的拖挂车与牵引车的角度检测装置还包括贯穿所述圆弧形轨道的两端第一长螺杆,所述第一长螺杆两端分别设置有第一螺母,所述第一螺母用于向内收紧所述圆弧形轨道。
8.本实用新型实施例中,所述的拖挂车与牵引车的角度检测装置还包括第二长螺杆和设置于所述圆弧形轨道中段上两对称位置的两个焊板,所述两个焊板上分别设置有螺孔,所述第二长螺杆穿过所述螺孔,所述第二长螺杆的两端分别设置有第二螺母,所述第二螺母用于向内收紧所述圆弧形轨道。
9.本实用新型实施例中,所述磁性小车包括车轮和车架,所述车架上设置有一拉绳连接机构,所述拉绳传感器的拉绳与所述拉绳连接机构相连接。
10.本实用新型实施例中,所述车架上还设置了一磁铁。
11.本实用新型实施例中,所述磁性小车上还设置了一z字架,所述z字架的一端从所述圆弧形轨道中伸出,且z字架伸出的一端设置有一圆孔。
12.本实用新型实施例中,所述的拖挂车与牵引车的角度检测装置还包括设置于所述
圆弧形轨道另一端的第二拉绳传感器,所述第二拉绳传感器与所述磁性小车相连接。
13.与现有技术相比较,采用本实用新型的拖挂车与牵引车的角度检测装置,在所述圆弧形轨道中设置磁性小车,并且在所述圆弧形轨道一端设置拉绳传感器,所述第一拉绳传感器的拉绳与所述磁性小车相连接,可以通过所述磁性小车在所述圆弧型轨道上的行程,然后根据圆弧和半径的关系快速的计算出所述磁性小车移动的角度,从而得到所述拖挂车和牵引车的角度,计算过程简单且准确;并且,可通过磁性吸引力来带动所述磁性小车移动,无需在所述拖挂车和牵引车之间安装绳索,不会发生绳索被拉断的情况,可靠性更高,且安装更简便。
附图说明
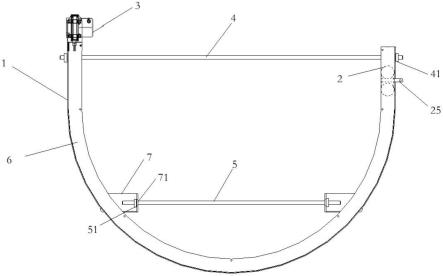
14.图1是本实用新型实施例的拖挂车与牵引车的角度检测装置的结构示意图。
15.图2是本实用新型实施例的磁性小车的结构示意图。
16.图3是本实用新型实施例的拖挂车与牵引车的角度检测装置检测角度的原理示意图。
具体实施方式
17.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
18.以下结合具体实施例对本实用新型的实现进行详细描述。
19.如图1所示,本实用新型实施例中,提供了一种拖挂车与牵引车的角度检测装置,其包括圆弧形轨道1、设置于所述圆弧形轨道1中且可沿所述圆弧形轨道1运动的磁性小车2、设置于所述圆弧形轨道1一端的拉绳传感器3、用于紧固所述圆弧形轨1的第一长螺杆4、第二长螺杆5和设置于所述圆弧形轨道1上的盖板6。所述拉绳传感器3的拉绳与所述磁性小车2相连接,用于检测所述磁性小车2在所述圆弧形轨道1上的行程。所述盖板6覆盖在圆弧形轨道1之上,用于防止所述磁性小车2脱离轨道。
20.如图2所示,所述磁性小车2包括车轮21和车架22。所述车架22上设置有一拉绳连接机构23,所述拉绳传感器3的拉绳与所述拉绳连接机构23相连接。所述车架上22还设置了一磁铁24,用于提供磁力。
21.进一步地,所述磁性小车2上还设置了一z字架25,所述z字架25的一端从所述圆弧形轨道1中伸出,且所述z字架25伸出的一端设置有一圆孔26。所述圆孔26用于连接绳索。在不需要通过磁力来带动所述磁性小车2运动时,可以通过在绳索的方式来带动所述磁性小车2运动。需要说明的是,所述z字架25的一端从所述圆弧形轨道1中伸出,所述圆弧形轨道1的侧壁需预留供所述z字架25伸出并运动的开槽。如果不需要采用绳索的方式来带动所述磁性小车2运动,所述磁性小车2上可以不设置所述z字架25。
22.所述第一长螺杆4贯穿所述圆弧形轨道1的两端,且所述第一长螺杆4两端分别设置有第一螺母41,所述第一螺母41用于向内收紧所述圆弧形轨道1,从而不仅可以防止所述圆弧形轨道1变形,还可以将所述圆弧形轨道1紧固在牵引车的鞍座上。所述圆弧形轨道1中段上两对称的位置分别设置有两个焊板7,所述两个焊板7上分别设置有螺孔71,所述第二
长螺杆5两端分别穿过所述两个焊板7上的螺孔71并通过第二螺母51固定,以向内收紧所述圆弧形轨道1。
23.需要说明的是,所述拖挂车与牵引车的角度检测装置可以安装于拖挂车上,也可以安装于牵引车上。当所述角度检测装置安装于拖挂车和牵引车中的一个上时,拖挂车和牵引车中的另一个上安装大磁铁或者绳索来带动所述磁性小车2运动。在安装时,所述圆弧形轨道1的圆心与连接拖挂车和牵引车的牵引销同轴,所述磁性小车2的初始位置位于所述圆弧形轨道1的正中间,大磁铁或者绳索牵引点正对所述磁性小车2设置,以便于更好的计算拖挂车与牵引车的角度。
24.如图3所示,所述磁性小车2的初始位置b和所述圆弧形轨道1的圆心a之间形成一个初始位置线段ab,所述磁性小车2的当前位置c和所述圆弧形轨道1的圆心a之间形成一个当前位置线段ac。由于小车和牵引车或者拖挂车同步转动,并且圆心与定位稍同轴,因此,所述初始位置线段ab和所述当前位置线段ac之间的角度∠bac即为拖挂车和牵引车的角度,这个角度根据所述磁性小车2在所述圆弧形轨道1上的行程bc即可计算得到,具体原理如下:
25.根据弧长公式:
[0026][0027]
则
[0028][0029]
其中,r是圆环槽的半径,l是车辆转弯时小车的行程bc的长度,即拉绳传感器拉出的绳子长度,α是小车转弯的角度,即∠bac。
[0030]
进一步地,本实用新型实施例中,为了更准确的测量所述磁性小车2的移动距离,还可以在所述圆弧形轨道的两端分别设置一个拉绳传感器。
[0031]
综上所述,采用本实用新型的拖挂车与牵引车的角度检测装置,在所述圆弧形轨道中设置磁性小车,并且在所述圆弧形轨道一端设置拉绳传感器,所述第一拉绳传感器的拉绳与所述磁性小车相连接,可以通过所述磁性小车在所述圆弧型轨道上的行程,然后根据圆弧和半径的关系快速的计算出所述磁性小车移动的角度,从而得到所述拖挂车和牵引车的角度,计算过程简单且准确;并且,可通过磁性吸引力来带动所述磁性小车移动,无需在所述拖挂车和牵引车之间安装绳索,不会发生绳索被拉断的情况,可靠性更高,且安装更简便。
[0032]
以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1